(54) ДВУХКООРДИНАТНОЕ УСТРОЙСТВО ДЛЯ ПРОГРАММНОГО Изобретение относится к автоматике и может быть использовано для программного управления установками сборки изделий электронной техники, например интегральных схем (ИС). По основному авт.св. № 807218 известно двухкоординатное устройство для программного управления, содержащее блок команд и в каждой координате первый цифро-аналоговый преобра зователь, блок программы, первый сче чик, второй счетчик, подключенный входом к первому выходу блока команд последовательно соединенные ключ, сумматор и блок сравнения, второй вход которого соединен с выходом вто рого цифро-аналогового преобразоват ля, выход - с первым входом шагового привода данной координаты, и блок коррекции, выход которого подключен к первому входу ключа другой координаты, соединенного вторым входом со вторым выходом блока команд, третий выход которого подключен ко входу блока программы, а четвертый выход и вход - соответственно ко второму входу и выходу шагового привода данной координаты,и в каждой координате преобразователь кода, элемент ИЛИ и коммутатор, выход которого
УПРАВЛЕНИЯ соединен со входом второго цифроаналогового преобразователя данной координаты, первый вход - с выходом второго счетчика данной координаты, второй вход - со вторым выходом блока команд, а третий выход - через первый счетчик с выходом элемента ИЛИ , данной координаты, подключенного входами к первому и пятому выходам блока команд, причем в каждой координате вход первого цифро-ан-алогового преобразователя через преобразователь кода соединен с выходом блока программ, а соответствующие выходы со входами блока коррекции и вторым входом сумматора дайной координаты. Это устройство позволяет в автоматическом режиме присоединять проволочные выводы к контактным площадкам кристалла и выводной рамки ИС С Однако устройство недостаточно точно определяет координаты кристалла при увеличении его размеров и неточности посадки по углу. Целью изобретения является увеличение точности устройства. Поставленная цель достигается тем, что в каждую координату введен масштабный усилитель, выход которого соединен с третьим входом сумматора
данной координаты, а вход - с выходо ключа другой координаты.
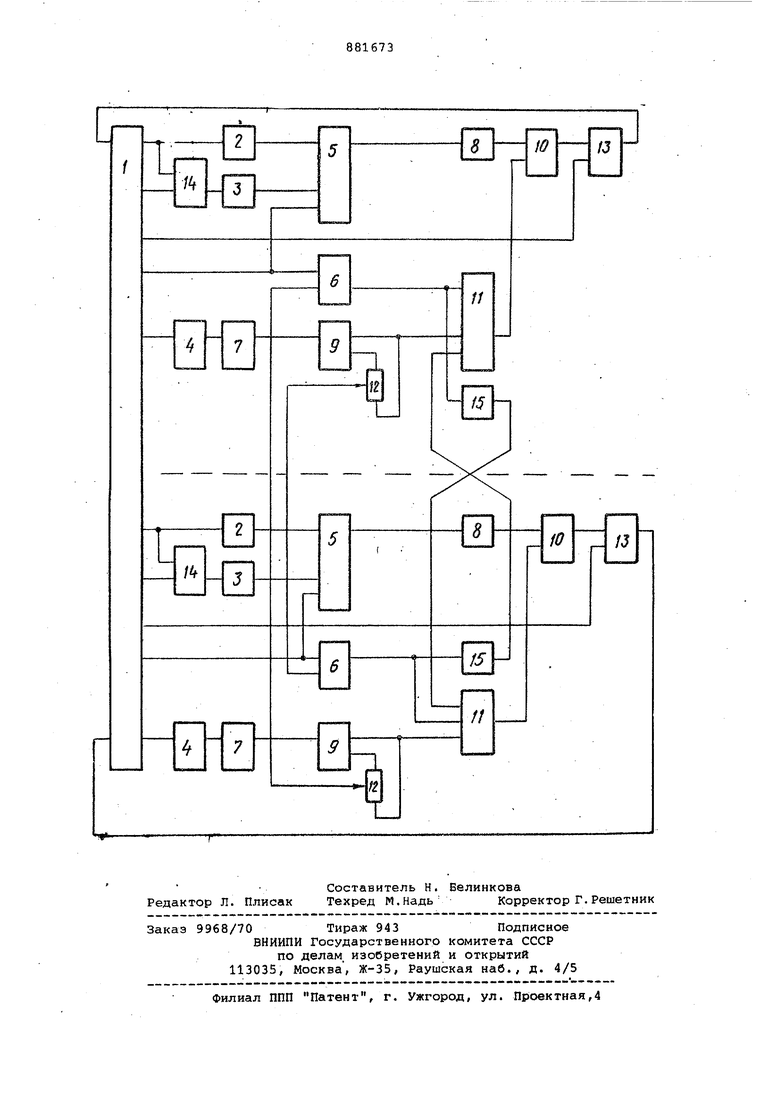
На чертеже приведена блок-схема устройстьа.
Устройство содержит командный блок 1 и две координаты X и Y, кажда из которых состоит из второго 2 и первого 3 счетчиков, блока программ 4, коммутатора 5, ключа б, преобразователя кода 7, второго 8 и первого 9 цифро-аналоговых преобразователей, блока сравнения 10, сумматора 11,блока коррекции 12, шагового привода 13 элемента ИЛИ 14 и масштабного усилителя 15.
Устройство работает следующим образом. ,
Блок 4 задает в двоично-десятичном коде координату X точки сварки, а также знак координаты, которая трансформируется преобразователем 7 в двоичный код, а преобразователем 9 - в напряжение. Преобразователь 9 имеет прямой и инверсный выходы, сигналы с которых поступают на входы 6jiOKa 12, причем прямой сигнал (аналоговое значение координаты) одновременно поступает на сумматор 11. С выхода блока 12 снимается сигнал, равный по величине напряжения произведению координаты X точки сварки на кристалле на угол сЦз i п для малых углов).соответствующий углу разворота кристалла относительно положения, заданного по программе. Этот сигнал является поправкой к координате ортогонального направления и поправкой к собственной координате, поэтому он проходит через ключ б, суммируется с аналоговым значение координаты Y и, пройдя через усилитель 15 (коэффициент передачи имеет величину 1/30), суммируется с аналоговым значением координаты X. Поправка по углу, вырабатываемая в канале координаты Y, подается через ключ 6 канала X на сумматор 11 канала X и через усилитель 15 на сумматор 11 канала Y.
Элемент ИЛИ 14 позволяет вводить в счетчик 3 поправку по линейной координате. Счетчик 2, как и счетчик 3, считает импульсы тактового генератора привода 13. Счетчики -2 и 3 подключены через коммутатор 5, управляемый блоком 1, к преобразователю 8, превращающему цифровую информацию, находящуюся в выбранном счетчике импульсов, в аналоговую форму (в напряжение).
Блок 10 сравнивает напряжение, соответствующее значению адресной координаты, в которую необходимо вывести сварочный инструмент, с текущей координатой, в которой находится сварочный инструмент,приводимый в движение приводом 13.Кроме того, блок 10 управляет включением и выключением йривода 13 и задает
направление перемещения по координате .
В исходном состоянии положение сварочного инструмента совпадает с начальной точкой, относительно которой заданы координаты точек сварки кристалла и рамки. Оператором производится совмещение оптической метки - перекрестия, совпадающей с положением инструмента, с координатами первой точки сварки на крксталле, при этом в счетчик 3 через элемент ИЛИ 14 вводится поправка по координате. Ввод поправки по углу разворота осуществляется при повороте подвижной оптической системы Метки-перекрестия до положения, при котором линии метки становятся параллельными осям симметрии кристалла. Наличие механической связи между оптической системой и потенциометром угловой коррекции обеспечивает требуемое значение поправки по углу. Командой с выхода блока 1 опрашивается первая координата, заданная в блоке 4, она преобразуется в двоичный код преобразователем 7, затем преобразователем 9 - в напряжение, подается на сумматор 11 и блок 12.
В случае отработки координаты кристалла поправка с блока 12 канала Y через ключ б поступает на сумматор 11 канала координаты X и через усилитель 15 на сумматор 11 канала координаты Y. В ортогональном канале происходит аналогичное действие.Одновременно с командой считывания координаты происходит запуск привода 13, при этом на его выходе возникают импульсы, считываемые одновременно счетчиками 2 и 3. Коммутатор 5 в этом случае подключает счетчик 2 к преобразователю 8, имеющему на выходе напряжение, соответствующее изменяющейся текущей координате,представленной в цифровом виде в счетчике 2. В момент совпадения двух напряжений блок 10 выключает привод 13 констатируя факт выхода инструмента в заданную точку. .
Следующей командой блок 1 опрашивает координату выводной рамки. Процесс отработки происходит так же, ка и для точки кристалла, только в этом случае ключ 6 отключает блок 12 от сумматора 11 и усилителя 15, а коммутатор 5 подключает счетчик 3/1 в ко тором находится поправка по линей ной координате. Величина перемещения в этом случае больше или меньше значения, заданного блоком 4, в зависимости от значения поправки по ли-нейной координате. Так как поправка по линейным координатам вводится оди раз в один из счетчиков, а в дальнейшем счетчики 2 и 3 считают импульсы синхронно, то поправка сохраняется в течение всего-цикла разварки кристалла, присутствуя в виде разности между числом импульсов в счетчиках 2 и 3.
Применение изобретения позволяет повысить точность отработки координат для кристаллов с большими линейными размерами и имеющих большой разворот по углу.
Формула изобретения Двухкоординатное устройство для программного управления по авт.св.
807218, отличающееся тем, что, с целью повышения точности устройства, в каждую координату введен масштабный усилитель,выход которого соединен с третьим входом сумматора данной координаты, а выход - с выходом ключа другой координаты.
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР 807218, кл. G 05 В 19/18, 1977.
| название | год | авторы | номер документа |
|---|---|---|---|
| Двухкоординатное устройство дляпРОгРАММНОгО упРАВлЕНия | 1977 |
|
SU807218A1 |
| Двухкоординатное устройство для программного управления | 1979 |
|
SU881672A2 |
| Двухкоординатное устройство для программного управления | 1984 |
|
SU1193644A2 |
| Устройство для двухкоординатного программного управления | 1979 |
|
SU860007A1 |
| УСТРОЙСТВО для ПОСТРОЕНИЯ ЭКВИПОТЕНЦИАЛЬНЫХ ЛИНИЙ | 1973 |
|
SU378888A1 |
| Устройство для вывода информации на экран электронно-лучевой трубки | 1977 |
|
SU1029177A1 |
| Устройство для двухкоординатного позиционирования | 1982 |
|
SU1070512A1 |
| Устройство для управления сборочным роботом | 1980 |
|
SU1075233A1 |
| Система адаптивного числового программного управления металлорежущим станком | 1980 |
|
SU954945A1 |
| Устройство для двухкоординатного управления рабочим органом | 1990 |
|
SU1815620A1 |