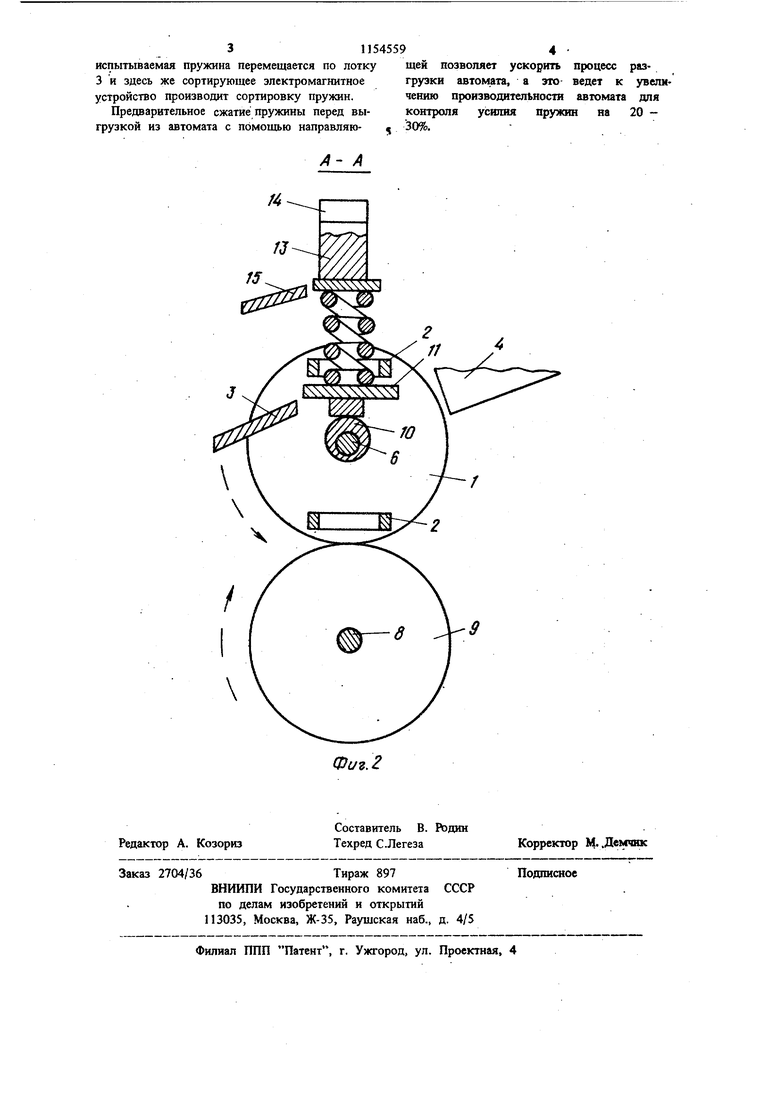
145 Изобретение относится к измерительной технике и может быть использовано во всех отраслях народного хозяйства, где требуется массовый контроль пружин сжатия, например, для контроля пружин, обеспечивающих опреде ленные усилия контактных нажатий в электри ческих аппаратах, при исш $тании пружин сжатия ремонтируемых автомобилей и сельскохозяйственных машин и т. п. По основному авт. св. N 993052 известен автомат, содержащий приводное устройство, связанное с механизмом подачи и механизмом нагружения пружины, устройство для измерения высоты пружины, контактирующее с механизмом нагружения и связанное с силоюмеритбльным устройством, устройство контроля параллельности оснований пружины, соединенное с устройствами силоизмерительным и контроля высоты пружины {1. После испытания пружина с помощью фиксирующей гильзы перемещается по опорному столу с испытательнЬй позиции по позицию выгрузки, где она выпадает в лоток и передвигается по нему под собственным весом, а затем сортируется в зависимости от резуль татов испытания. Перемещение пружины по лотку под собственным весом, придающим ей незначительную скоросп., увеличивает время, затраченное ка выгрузку пруясины. Так как I время является составной частью общего .времени, затрачеглого на процесс контроля пружины, перемещение пружины под собст, венным весом снижает производительность процесса контроля автомата. Цель изобретения - повыщсние производительности автомата. Указанная цель достигается тем, что автома для контроля усилия пружин снабжен ускорителем выгрузки прулош, который выполнен в ввде направляющей, жестко закрепленной на корпусе автомата над выходным краем опорного стола механизма нагружения. Устройство дня ускорения выгрузки пружи ны позволяет после окшпания испытания пружины сжать ее между опорным столом н жестко закрепленной на корпусе автомата направляющей и, используя энергию сжатой . пружины, придать ей допо;шительную скорост вьп-рузки путем отталкивания от жестко закрегшенной направляющей. Таким образом, пружина перемещается не только под собственным весом, но и за счет собственной энергии сжатия, что увеличивает скорость выгрузки. Соответственно уменьщаёт время выгрузки, а значит и время затрачивае мое на процесс контроля одной прухсины. Эт ведет к увеличению производительности процесса контроля автомата. На фиг. 1 схематически изображен предлагаемый автомат для контроля пружин; на фиг. 2 - разрез А-А на фиг. 1. Автомат для контроля пружин включает механизм подачи, состоящий из ведомой щестерни-подавателя 1, на которой закреплены фиксирующие гильзы 2, лотка 3 выброса и лотка 4 подавателя; приводное устройство, имеющее мотор-редуктор 5, который вращает приводной вал 6, периодически перемещающий с помощью передачи 7 прерывистого действия типа мальтийский крест, ведомого вала 8 и ведущей щестерни 9 шестерню-подаватель 1; механизм нагружения, состоящий из кулачка 10 последовательного, нагружения воздействующего на испытуемую пружину, помещенную на опорный стол П. С опорным столом 11 контактирует устройство 12 измерения высоты пружины, соединенное через силоизмерительное устройство 13 с устройством 14 контроля параллельности основашш пружи-. НЬ1. Ускоритель выгрузки пружины представляет собой жестко закрепленную на корпусе автомата над выходным краем опо{жого стола механизма нагружения направляющую 15. Устройство работает следующим образом. Испытываемая пружина поступает с лотка 4 подавателя в фиксирующую гильзу 2 шестерни-подавателя 1. При очередном повороте шестерни-подавателя 1, осуществляемом с по- i мощью передачи 7 прерывистого действия, гильза 2 с пружиной переходит на испытательную позицию, при этом пружина фиксируется опорным столом 11 и устройством 14 контроля параллельности основашш пружины. Устройство 12 замеряет высоту пружины в свободном состоянии. При вращения кулачка 10 опорный стол 11 перемещается вверх и сжимает испытываемую пружину. Достижение первой контрольной деформащш регистрируется устройством 12 контроля высоты-пружины, которое подает сигнал на силоизмерительное устройство 13 для измерения первого рабочего усилия. При дальнейшем сжатии пружины аналогично производатся контроль по всем рабочим усилиям. Сигналы от устройств 12-14 поступают на сортирующее устройство. По окончании процесса контроля npjoKUHbi кулачок 10 опускает опорный стоя 11 вместе с испытываемой пружиной. Щестерня-подаватель 1 перемещает фиксирующую гильзу 2 с пружиной по опорному столу 11. Пружина, упираясь в направляющую 15, сжимается. При дальнейшем вращении шестерни-подавателя 1 фиксирующая гильза 2 со сжатой пружиной оказывается над лотком 3. За счет энергии сжатия и собственного веса
испытываемая пружина перемещается по лотку 3 и здесь же сортирующее электромагнитное устройство производит сортировку пружин.
Предварительное сжатие пружины перед выгрузкой из автомата с помощью направляю/ - А
щей позволяет ускорить процесс разгрузки автомата, а это ведет к увеличению производительностя автомата для контроля усилия пружин из 20 30%,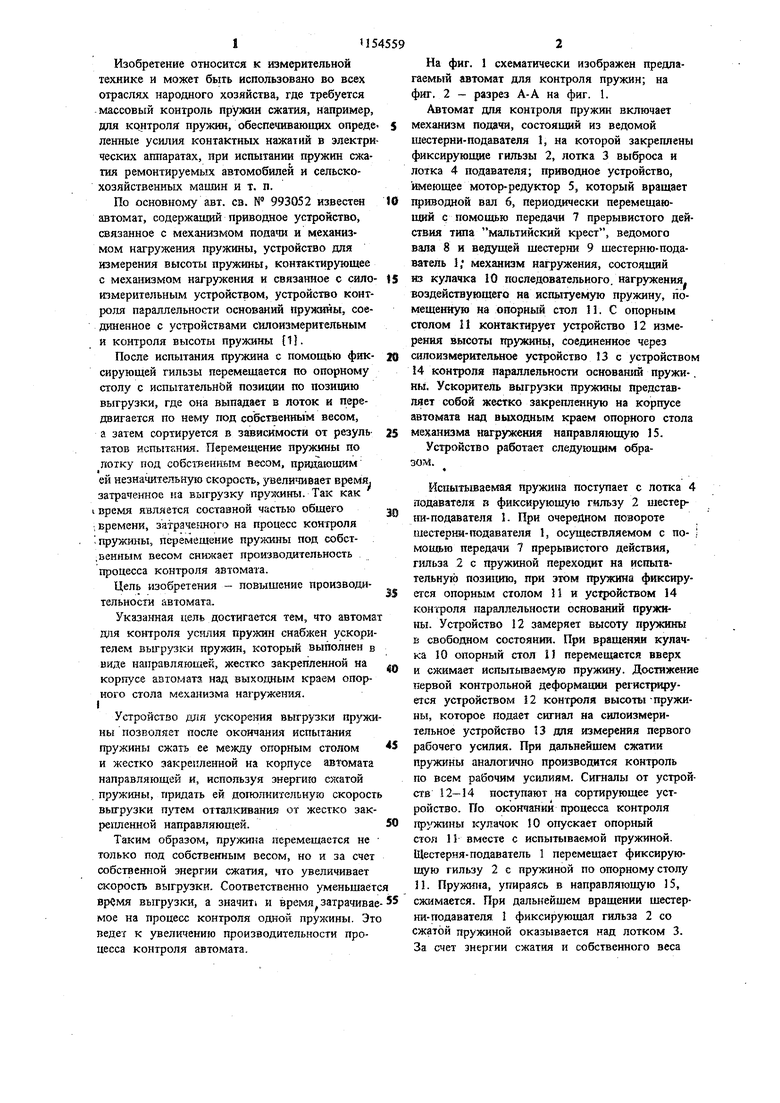
| название | год | авторы | номер документа |
|---|---|---|---|
| Автомат для контроля пружин растяжения | 1983 |
|
SU1154558A1 |
| Автомат для контроля усилия пружин | 1981 |
|
SU993052A1 |
| Устройство для автоматического контроля пружин | 1985 |
|
SU1377627A1 |
| АВТОМАТИЧЕСКАЯ ЛИНИЯ ДЛЯ ИЗГОТОВЛЕНИЯ, ИСПЫТАНИЯ И СОРТИРОВКИ ЦИЛИНДРИЧЕСКИХ ПРУЖИН | 1992 |
|
RU2005572C1 |
| Автомат для кладки из кирпича стен, колонн и т.п. | 1938 |
|
SU58731A1 |
| Машина для прочески щетины и волоса | 1940 |
|
SU59602A1 |
| УСТРОЙСТВО ПОДАЧИ БОЕПРИПАСОВ | 2011 |
|
RU2451892C2 |
| ПИСТОЛЕТ-ПУЛЕМЕТ | 1997 |
|
RU2113674C1 |
| КРОМКООБРАБАТЫВАЮЩИЙ СТАНОК | 1969 |
|
SU248447A1 |
| УСТРОЙСТВО ПОДАЧИ БОЕПРИПАСОВ | 2012 |
|
RU2491490C2 |
АВТОМАТ ДЛЯ КОНТЮЛЯ УСИЛИЯ ПРУЖИН по авт. св. № 993052, отличающийся тем, что, с целью повышения тфоизводительностн, он снабжен ускорителем выгрузки пружин, который выполнен в виде направляющей, жестко закрепленной на корпусе автомата над выходным краем опорного стола механизма нагружения.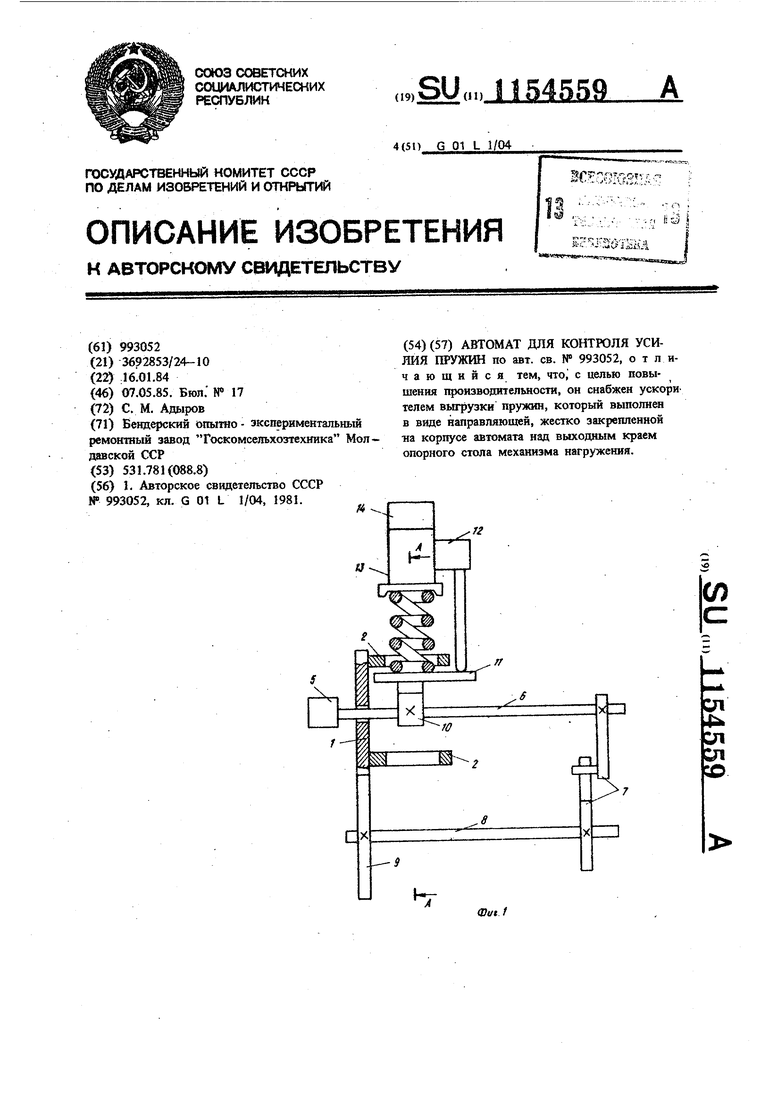
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Автомат для контроля усилия пружин | 1981 |
|
SU993052A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
