f f9
tl
«IIHMBUH
T I T т т
MlHiiiiiii
СО
О)
ьо 
| название | год | авторы | номер документа |
|---|---|---|---|
| Автомат для контроля усилия пружин | 1981 |
|
SU993052A1 |
| Автомат для контроля пружин растяжения | 1983 |
|
SU1154558A1 |
| Автомат для контроля усилия пружин | 1984 |
|
SU1154559A2 |
| Автомат для сортировки внутренних и наружных колец шариковых радиальных подшипников | 1958 |
|
SU120919A1 |
| Автомат для контроля линейных параметров дисков фрикционов | 1975 |
|
SU766670A1 |
| Устройство для контроля усилия расчленения элементов электрических соединений | 1976 |
|
SU572666A1 |
| УСТРОЙСТВО для ЗАГРУЗКИ ШТУЧНЫХ ЗАГОТОВОК | 1972 |
|
SU335076A1 |
| Устройство для контроля и сортировки многогранных пластин | 1981 |
|
SU1079309A1 |
| Устройство для сортировки лесоматериалов | 1984 |
|
SU1219174A1 |
| Устройство для контроля электрических параметров радиодеталей | 1983 |
|
SU1264247A1 |
Изобретение относится к приборостроению. Цель изобретения - повышение качества и производительности контроля пружин. При перемещении пружины в фиксирующую гильзу 27 ее . положение контролируется и в случае незначительных отклонений корректируется подпружиненными пластинами блока 19 контроля положения пружины. Пружина, установившаяся с большим перекосом в гильзу 27 перед поступлением на испытательную позицию по опорному столу 28, передает сигнал отключения устр-ва с помощью концевых выключателей - датчиков положения пружины на приводное устройство. Штанга 34 с помощью механизма 35 подъема-опускания опускается ниже лотка-подавателя 33, двигаясь по , склизу 37 с помощью роликов 36. Фиксирующая гильза 27 с правильно установленной в ней пружиной упирается в блок управляемой муфты и отключает ее. Контролируемая пружина, параметры которой не соответствуют заданным, подается в отсек брака. 3 з.п. ф-лы, 6 ил. с ел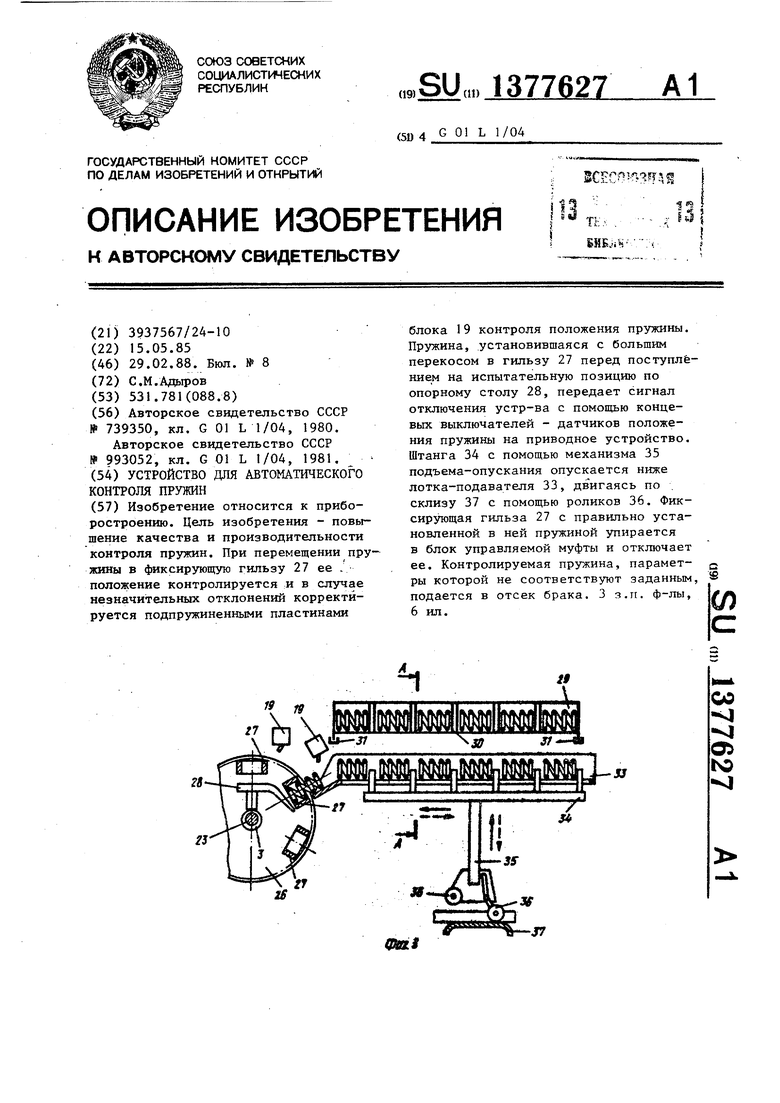
O&scl
Изобретение относится к приборостроению и может быть использовано во всех отраслях народного хозяйства, где требуется массовый контроль и испытание пружин сжатия и растяжения.
Цель изобретения - повышение качества и производительности контроля пружин.
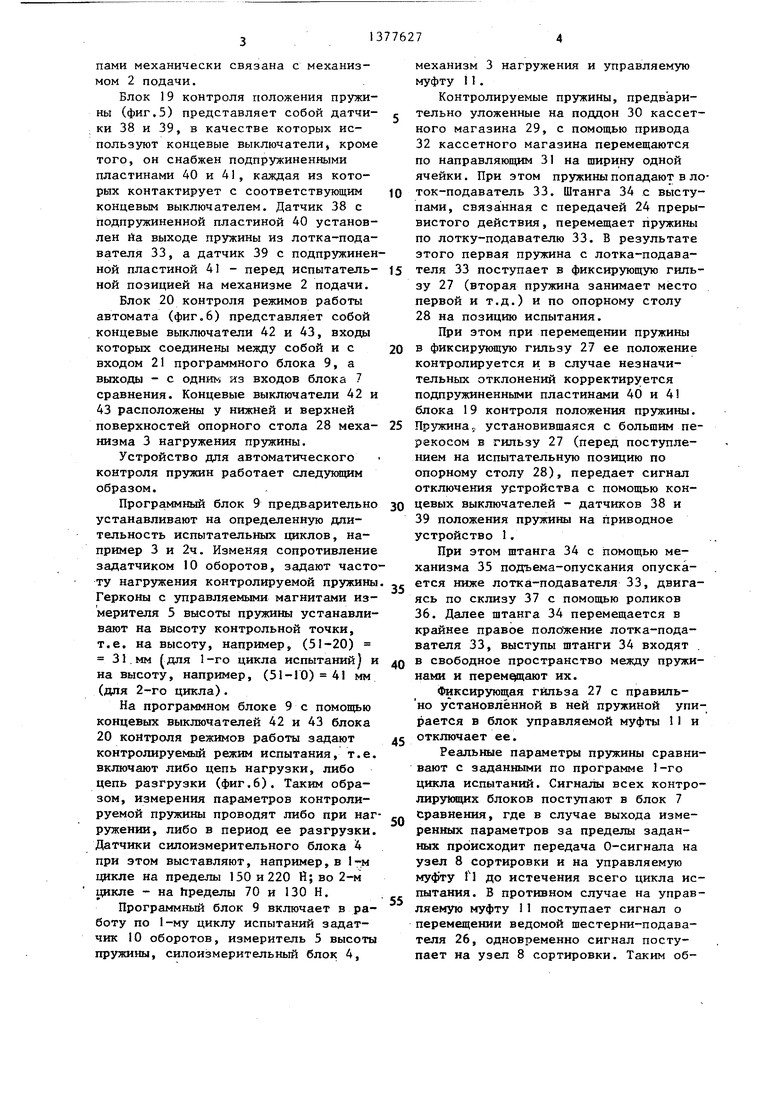
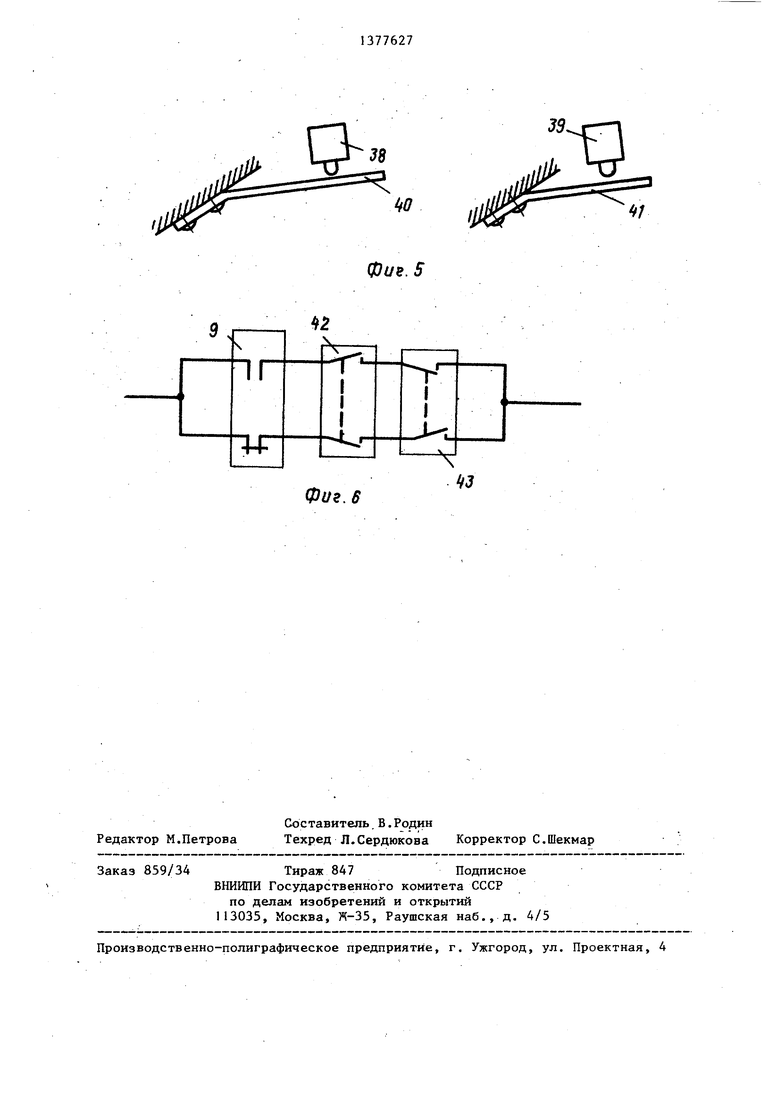
На фиг.1 изображена блок-схема устройства для автоматического контроля прзокин; на фиг.2 - схема устройства, общий вид; ла фиг.З - загружающий блок, общий вид; на фиг.4 - разрез А-А на фиг.3; на фиг.5 - схема блока контроля положения пружины; на фиг.6 - схема блока контроля режимов работы устройства.
Устройство для автоматического контроля пружин (фиг.1 и 2) содержит привод 1, соединенный с механизмом 2 подачи и механизмом 3 нагружения пружины, силоизмерительный блок 4, измеритель 5 высоты пружины и блок 6 контроля параллельности оснований пружины, соединенные через блок 7 сравнения с узлом 8 сортировки с механизмом 2 подачи, программный блок 9, задатчик 10 оборотов и управляемую муфту 1I.
Выход задатчика 10 оборотов соединен с входом приводного блока 1, а его вход - с выходом 12 программного блока 9, выход 13 программного блока 9 соединен с входом 14 управляемой муфты 11, выход 15 - с силоизмери- тельным блоком 4, выход 16 - с измерителем 5 высоты пружины, выход 17 - с блоком 6 контроля параллельности оснований пружины. Выход блока 7 ; сравнения соединен с входом 18 управляемой муфты I1. Устройство включает в себя также блок 19 контроля положения пружины, связанный с приводом 1, блок 20 контроля режимов работы устройства, вход которого соединен с выходом 21 программного блока 9, а его выход - с блоком 7 сравнения. Загружающий блок 22 механически связан с приводом 1 и механизмом 2 подачи.
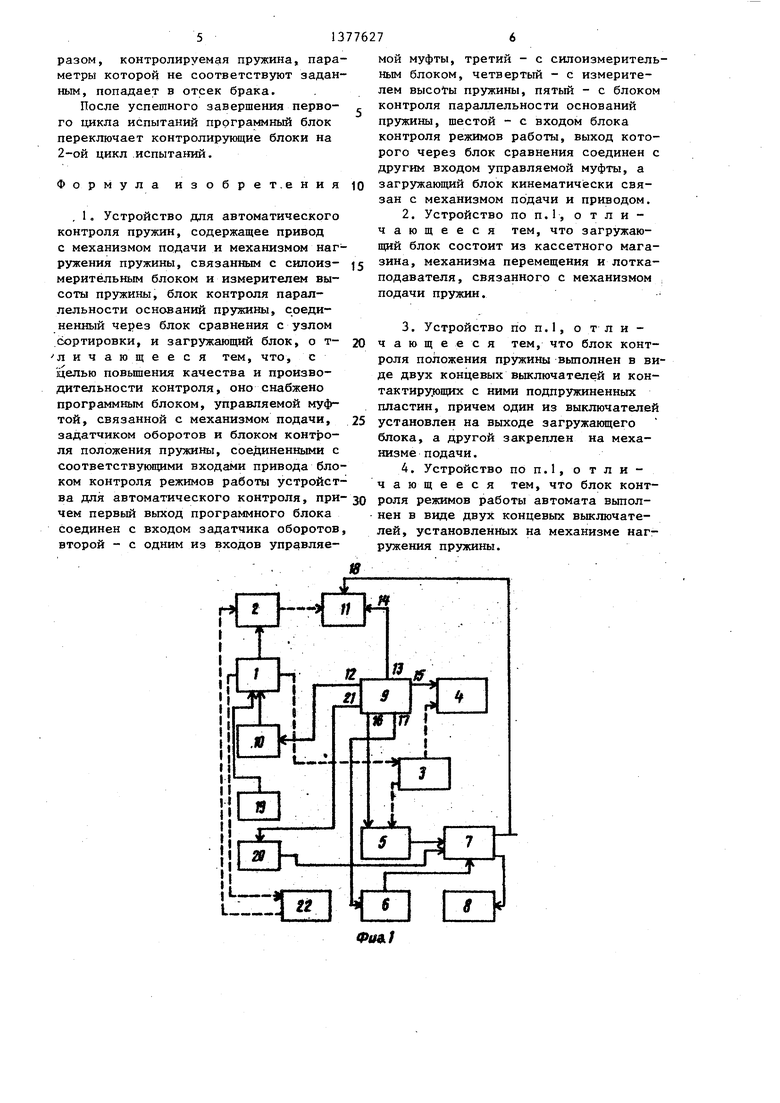
Механизм 2 подачи представляет собой (фиг.2 и 3) приводной вал 23, соединенньй с приводом 1. Вал 23 соединен с управляемой муфтой 11, на которой жестко закреплена передача 24 прерывистого действия, находящаяся в зацеплении с передачей 25. Последняя механически связана с ведомой
шестерней-подавателем 26, к которой прикреплены фиксирующие гильзы 27. В качестве задатчика 10 оборотов
можно использовать переменное сопротивление, включенное в цепь обмотки возбуждения двигателя постоянного тока, который используется в качестве привода 1.
Силоизмерительный блок 4 представляет собой тензодатчйк, изготовленный, например, из германиевых сплавов, сопротивление которых изменяется в зависимости от прилагаемого
усилия. Измеритель 5 высоты пружины представляет собой систему герконов с управляемыми магнитами, закрепленными на определенной высоте на опорном столе 28. Высота их установки
задает контролируемую высоту пружины. В пазах между магнитами и герконами перемещаются ферромагнитные пластины, которые осуществляют включение герко- новых выключателей (не показано).
Пластины жестко закреплены на подвижном щтоке, соединенном с силоизмери- тельным блоком 4.
Узел 8 сортировки представляет собой лоток с подвижной шторкой, соединенной с злектромагнитом.
Программный блок 9 представляет собой программное реле времени.
Блок 7 сравнения представляет собой релейную группу, собранную, например, на электромагнитных реле, катушки которых подключены к силоизме- рительному блоку 4; блоку 6 контроля параллельности оснований пружины, измерителю 5 высоты пружины, а их
контакты образуют цепи, подключенные к входам узла 8 сортировки и управляемой муфты 11.
Загружающий блок 22 (фиг.З и 4) состоит из кассетного магазина 29, поддона 30, свободно перемещаемого по направляющим 31 с помощью привода 32 кассетного магазина 29. Лоток-подаватель 33 загружающего блока 22 сопряжен с механизмом 2 подачи пружин, а именно с фиксирующей гильзой 27, в которой пружина перемещается на испытательную позицию. Лоток-подаватель 33 состоит из штанги 34 с выс- тупами, прикрепленной к механизму 35 подъема-опускания штанги 34. Ролики 36 обеспечивают работу механизма 35 подъема-опускания при перемещении его по склизу 37, Штанга 34 с выступами механически связана с механизмом 2 подачи.
Блок 19 контроля положения пружины (фиг,5) представляет собой датчики 38 и 39, в качестве которых используют концевые выключатели кроме того, он снабжен подпружиненными пластинами 40 и 41, каждая из которых контактирует с соответствующим концевым выключателем. Датчик 38 с подпружиненной пластиной 40 установлен йа выходе пружины из лотка-подавателя 33, а датчик 39 с подпружиненной пластиной 41 - перед испытательной позицией на механизме 2 подачи.
Блок 20 контроля режимов работы автомата (фиг.6) представляет собой концевые выключатели 42 и 43, входы которых соединены между собой и с входом 21 программного блока 9, а выходы - с одниь4 из входов блока 7 сравнения. Концевые выключатели 42 и 43 расположены у нижней и верхней поверхностей опорного стола 28 механизма 3 нагружения пружины.
Устройство для автоматического контроля пружин работает следующим образом.
Программный блок 9 предварительно устанавливают на определенную длительность испытательных циклов, например 3 и 2ч. Изменяя сопротивление задатчйком 10 оборотов, задают частоту нагружения контролируемой пружины Герконы с управляемыми магнитами измерителя 5 высоты пружины устанавливают на высоту контрольной точки, т.е. на высоту, например, (51-20) 31.мм (для 1-го цикла испытаний) и на высоту, например, (51-10) 41 мм (для 2-го цикла).
На программном блоке 9 с помощью концевых выключателей 42 и 43 блока 20 контроля режимов работы задают контролируемый режим испытания, т.е. включают либо цепь нагрузки, либо цепь разгрузки (фиг.6). Таким образом, измерения параметров контролируемой пружины проводят либо при наг ружеиии, либо в период ее разгрузки. Датчики силоизмерительного блока 4 при этом выставляют, например,в 1-м цикле на пределы 150 и 220 И; во 2-м уикле - на Пределы 70 и 130 Н.
Программный блок 9 включает в работу по 1-му циклу испытаний задат- чик 10 оборотов, измеритель 5 высоты пружины, силоизмерительньй блок 4,
0
5
0
5
0
5
0
5
механизм 3 нагружения и управляемую муфту 11.
Контролируемые пружины, предварительно уложенные на поддон 30 кассетного магазина 29, с помощью привода 32 кассетного магазина перемещаются по направляющим 31 на ширину одной ячейки. При этом пружины попадают в лоток-подаватель 33. Штанга 34 с выступами, связанная с передачей 24 прерывистого действия, перемещает пружины по лотку-подавателю 33. В результате этого первая пружина с лотка-подавателя 33 поступает в фиксирующую гильзу 27 (вторая пружина занимает место первой и т.д.) и по опорному столу 28 на позицию испытания.
При этом при перемещении пружины в фиксирукицую гильзу 27 ее положение контролируется и в случае незначительных отклонений корректируется подпружиненными пластинами 40 и 41 блока 19 контроля положения пружины. Пружина., установившаяся с большим перекосом в гильзу 27 (перед поступлением на испытательную позицию по опорному столу 28), передает сигнал отключения устройства с помощью концевых выключателей - датчиков 38 и 39 положения пружины на приводное устройство 1.
При этом штанга 34 с помощью механизма 35 подъема-опускания опускается ниже лотка-подавателя 33, двигаясь по склизу 37 с помощью роликов 36. Далее штанга 34 перемещается в крайнее правое положение лотка-подавателя 33, выступы штанги 34 входят . в свободное пространство между пружинами и перемедают их.
Фиксирующая гильза 27 с правиль- но установленной в ней пружиной упирается в блок управляемой муфты 1I и отключает ее.
Реальные параметры пружины сравнивают с заданными по программе 1-го цикла испытаний. Сигналы всех контролирующих блоков поступают в блок 7 сравнения, где в случае выхода измеренных параметров за пределы заданных происходит передача 0-сигнала на узел 8 сортировки и на управляемую муфту Г1 до истечения всего цикла испытания. В противном случае на управляемую муфту 11 поступает сигнал о перемещении ведомой щестерни-подава- теля 26, одновременно сигнал поступает на узел 8 сортировки. Таким образом, контролируемая пружина, параметры которой не соответствуют заданным, попадает в отсек брака.
После успешного завершения перво- го цикла испытаний программный блок переключает контролирующие блоки на 2-ой цикл испытаний.
Формула изобре т.е н и я ю
, 1, Устройство для автоматического контроля пружин, содержащее привод с механизмом подачи и механизмом наг- ружения пружины, связанным с силоиз- 5 ерительным блоком и измерителем высоты пружины, блок контроля паралельности оснований пружины, соединенный через блок сравнения с узлом сортировки, и загружающий блок, о т- 20 ичающееся тем, что, с елью повьшения качества и произвоительности контроля, оно снабжено программным блоком, управляемой муфтой, связанной с механизмом подачи, 25 задатчиком оборотов и блоком контроля положения пружины, соединенными с соответствующими входами привода блоком контроля режимов работы устройства для автоматического контроля, при- зо чем первый выход программного блока соединен с входом задатчика оборотов, второй - с одним из входов управляеЙГ
мой муфты, третий - с силоизмеритель ным блоком, четвертый - с измерителем высо гы пружины, пятый - с блоком контроля параллельности оснований пружины, шестой - с входом блока контроля режимов работы, выход которого через блок сравнения соединен с другим входом управляемой муфты, а загружающий блок кинематически связан с механизмом подачи и приводом.
Фи.
Фи.6
W
Фие.5
| Устройство для измерения упругих характеристик пружин | 1978 |
|
SU739350A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Автомат для контроля усилия пружин | 1981 |
|
SU993052A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
