ел
4
ел
ел
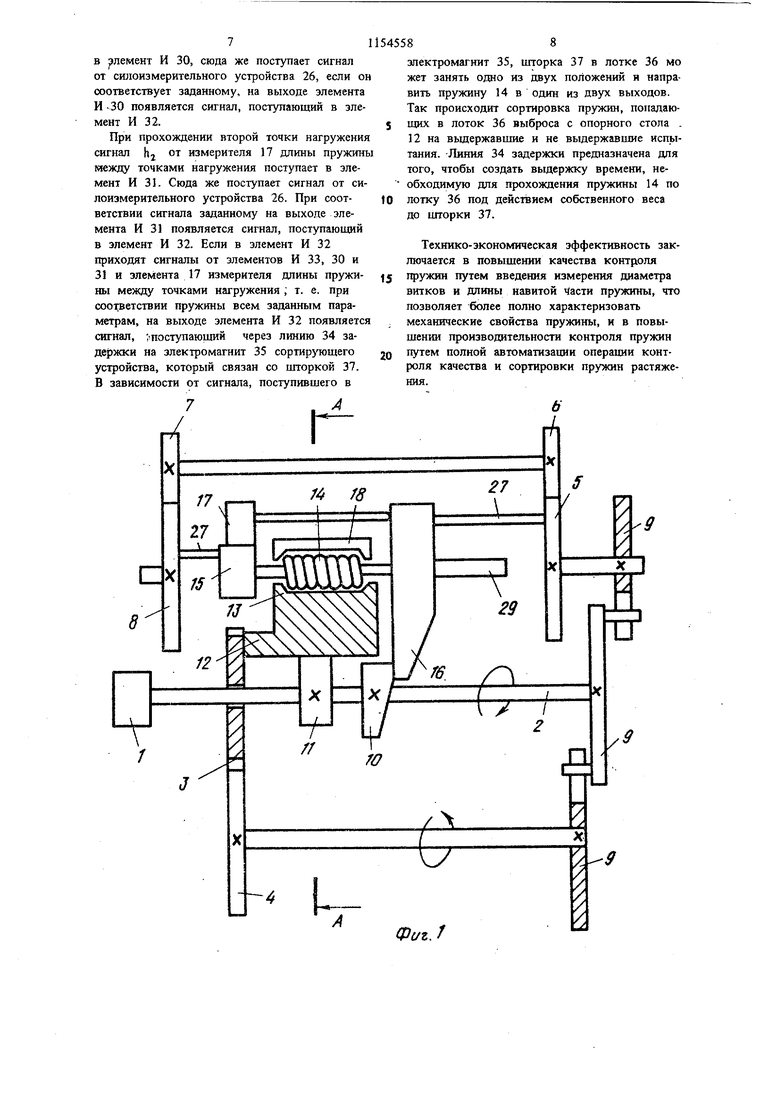
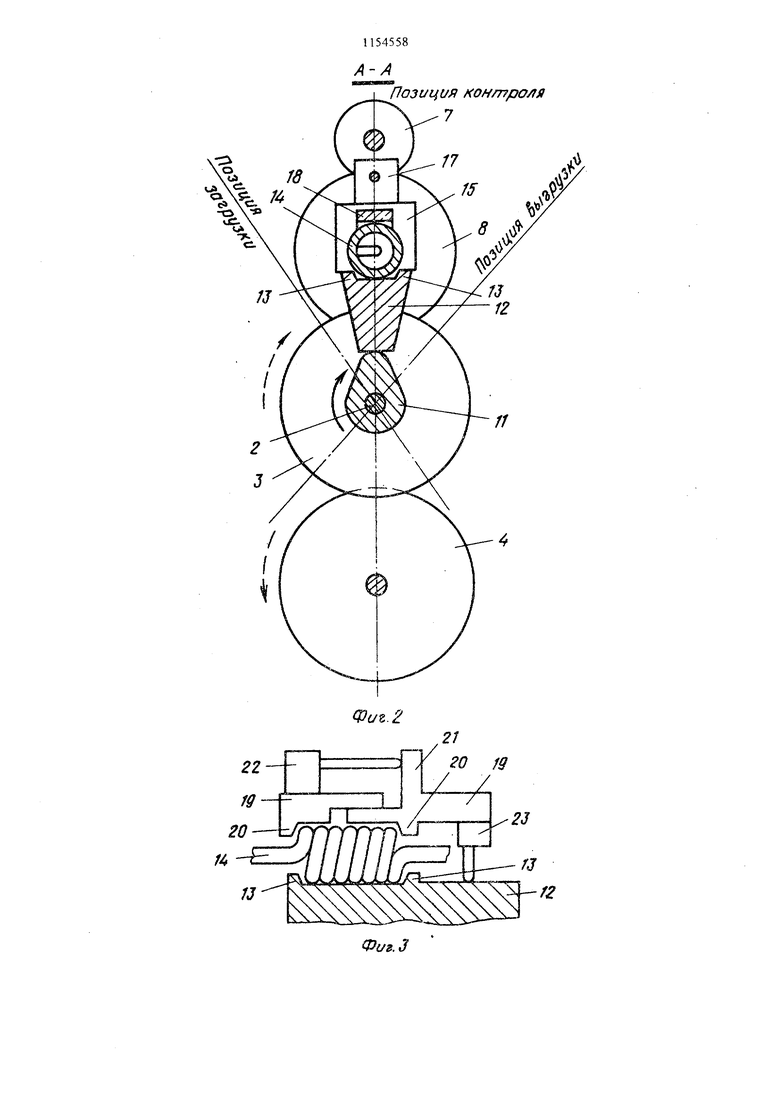
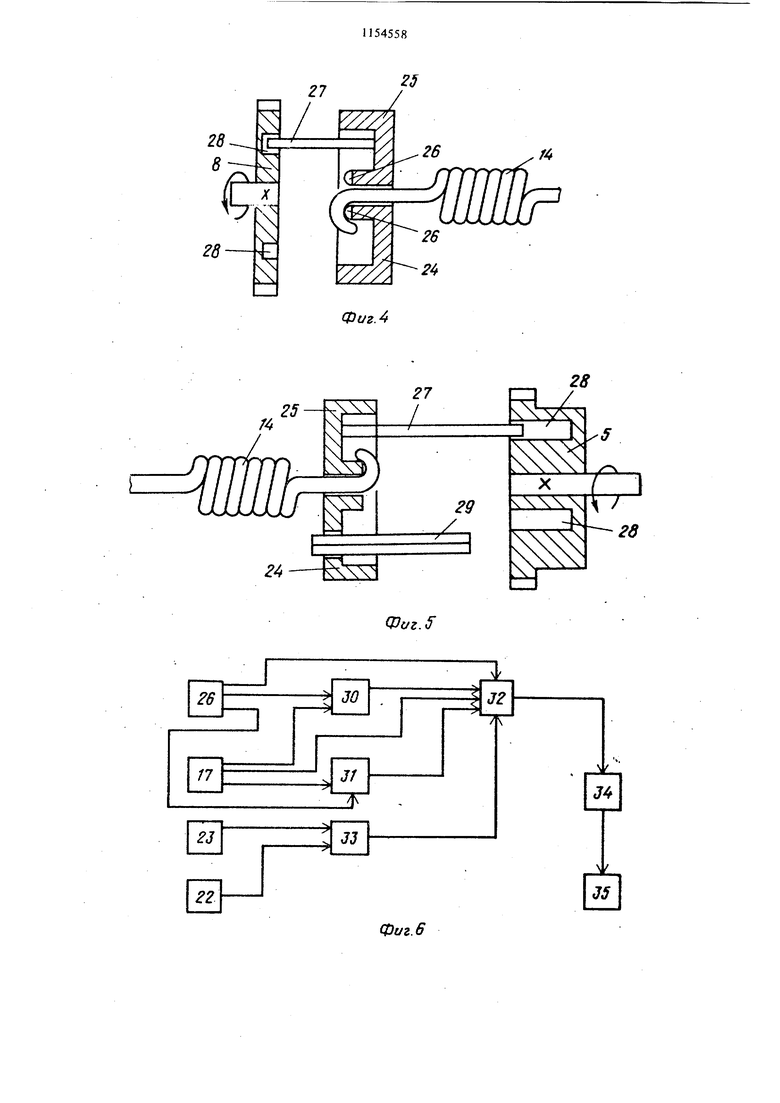
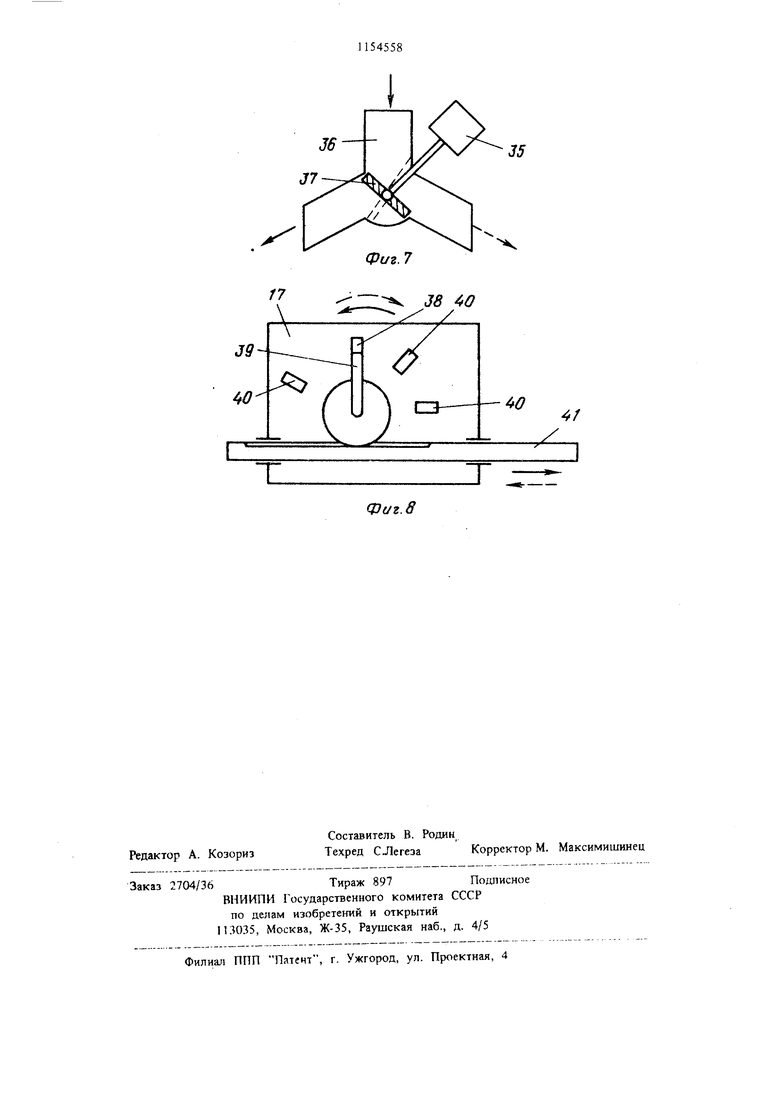
00 J Изобретение относится к измерительной технике и может быть использовано во всех отраслях народного хозяйства, где требуется массовый контроль Цилиндр11ческих пружин растяжения, например, для контроля пружин электрических аппаратов при испытании пружин растяжения автомобилей, тракторов и т. п. Известно устройство для контроля пружин содержащее опорную плиту, на которой установлен с помощью штока предметный столик смешгые грузы, укрепленные на опорной плоскости нагружающей рамы, механизм нагружений, образованный эксцентриком, и индикатор часового типа 1. Производительность контроля и точность данного устройства недостаточно высоки, так как в нем используются сменные грузы и крючки для кре;1ления пружин и, следовател НО, необходима установка и снятие каждои контролируемой пружины и ручное манипулирование со сме нными грузами. Наиболее близким по технической сущности к предлагаемому является устройство для ко троля пружин, содержащее приводное ycipoftcT во, связанное с механизмом подачи опорных столов, механизмом гферягзистого действия и кулачковым механизмом иагружения пружин, опорный стол, измеритель дзпшы пружины . между точками нагружетрля и силокзмерительное устройство (2. Однако извесгаое устройство не . обеспечить автоматизаодю процесса контролн пружин растяжения и ие позволяет контролир вать навитой частр и диаметр витков, пружины, 4io снижает качество и производител ность процесса контроля. Цель изобретения - расширение функ1№о налъных возмож1{остей. Указанная цель досгьгается тем, что в гизтомат для контроля пружкк растяжения, содер жашлй приводное устройство, связашюе с . механизмом подага опорного стола, механизмом прерывистого действия к кулач1 овь1М механизмом на1ружек{« , опорный стол, измери-; тель ДЛ1ШЫ npjoKHHH между токами нагружения, силоизморителькое устройство, введены кулач ковык механизм подьема опорного стола, подвижный и неподвижный патроны-захваты, измерители длинь навитой части пружз ны и диамгтра витков пружик и связанные с ними прижимные гшаст1гаы, причем кулачковый механизм жестко закреплен на приводном валу, пгтроьъ;-захваты установлены над опорным столом и связаны с механизмом подачи опорного стола, ,а прижимные пласгяяы - с механизмом подъема опорного стопа. 8 Кроме того, каждый патрон-захват выполнен в виде подвижного и неподвижного кулачков, смонтированных в общем корпусе. Ка фиг. 1 схематично изображен автомат для контроля пружин растяжения; на фиг. 2разрез А-А на фиг. 1; на фиг. 3 - неподвижный патрон-захват; на фиг. 4 - подвижный патрон-захват; на фиг. 5 - измерительный блок; на фиг. 6 - схема управления продессом контроля пружины; на фиг. 7 - автома- . тический сорткрователь; на фиг. 8 - конструктивное выполнение измерителя длины пружины между точками нагружения. Автомат для контроля пружин растяжения (фиг. 1 и 2) содержит приводное устройство, состоящее из мотора-редуктора i и приводного вала 2, механизм подачи опорных столов, состоящий из ведомой 3 и ведущей 4 шестерен-подавателей, шестерен 5-8 входящих в зацепление с механизмом 9 прерывистого действия, который конструктивно может быть выполнен в В1ще мальтийского креста, кулачок 10 механизма нагружения пружины, установленный на приводном валу 2, кулачок 11 механизма подъема опорного стола, опорные столы 12 с выступами 13, предназначен -iii5MH ДЛЯ установки испытуемой пружины 14, установленные на ведомой шестер {е-подавателе З.с помощью пазов типа ласточкин хвост с возможностью продольного перемещения в них, неподвижный iS и подвижный 16 патроны-захваты, в которых автоматически закрепляются концы испытуемой пружины 14, измеритель пружины между точками 7 нагруженш, установленный на неподвижном патроне-захвате 15, измерительный блок 18(фиг.З), состоящий из прижимных пластин 19с направляющими выкупами 20, измерительни м выступом 21, с которым контактирует измеритель 22 длины навитой части пружины, а измеритель 23 диаметра витков Г1ружи} ы установлен на прижимной пластине 9 и контактирует с опорным столом 12, автомр.тотеский сортирователь (фиг. 7). Неподаижньш патрон-захват 15 (фиг.4) содержит подвижный 24 и неподвиз(сньгй 25 . :кулачки с1тоизмерительное устройство 26, расположенное на выступах кулачков 24 и 25, палец. 27, одкн конец которого закреплен на кулачке 25, а с другой входит в профильный паз 28, выполненный в щс-стерне 8, поэтому при врапдении шестерни 8 кулачок 25 может поддиматься и опускаться, зажимая luiK освобождая стержень пружины 14. Подвижный патрон-захват 16 (фиг. 5) содержит неподвижный 24 и подвмжньн 25 кулачки, палец 27, один конец которого закреплен на кулачке 25, а другой входит в пр9фильный паз 28, выполненный в шестерне 5, пшицевой вал 29, вдоль которого могут перемещаться кулачки 24 и 25 при нажатии кулачка 19 механизма нагружения. Электрическая схема управления процессом контроля Пружин растяжения (фиг. 6) содер жит элементы И 30-33 и линию 34 задержк G входом элемента И 30 соединены силоизмерительное устройство 26 и измеритель 17 длины пружины между точками нагружения, с выходом элемента И 30 соединен вход элемента И 32. Вход элемента И 31 соедине с измерителем 17 длины пружины между точками нагружения и с силоизмерительным устройством, а его выход - с входом элемента И 32. Вход элемента И 33 соединен с измерителем 23 диаметра витков пружины и измерителем 22 длины навитой части пружины, а выход- с входом элемента И 32. Вход элемента И 32 имеет связь с кзмер телем 17 длины пружины между точками нагружения, а выход через линию 34 задерж связан с электромагнитом 35 автоматическог сортирования. Автоматический сортирователь (фиг. 7) состоит из электромагнита 35, лотка 36 выброса пружин и шторки 37, которая може занимать внутри лотка, поворачиваясь, два . положения. Шторка 37 перемещается в зависимости от сигнала, пришедщего -на электромагнит 35. Измеритель 17 длины пружины между точ ками нагружения, измеритель 22 длины навитой части, измеритель 23 диаметра витков Тфужины конструктивно могут представлять собой индикаторы часового типа (фиг. 8) с постоянным магнитом 38, закрепленным на поворачивающейся стрелке 39, гекконами 40 месторасположение которых является задатчиком сигнала, л штоком 41, при перемещении которого магнит 38 тоже перемещается и проходя над герконом 40, замыкает его контакты и в схему управления процессом контроля пружин поступает соответствующий сигнал.В измерителе 22 длины навитой;.части и измерителе 23 диаметра витков пружины установлено по одному геркону в месте, соответствующем длине навитой части и диаметру испытываемой пружины. В измерителе пружины между точк ми 17 нагружения установлены три геркона: первый - в месте, соответствующем длине пружины в иенагруженном состоянии, второй в месте, соответствующем нерпой длине нагр жения (первой величине деформации), третий в месте, соответствующем второй juiinie нагружения (второй величине деформации). Автомат для контроля пружин растяжения работает следующим образом. На позиции загрузки пружин пружина 14 подается на опорный стол 12 и ложится между направляющими выступами 13. Мотор-редуктор 1 черезприводной вал 2, механизм 9 прерывистого действия и шестернюподаватель 4 передает вращение на ведомую шестерню-подаватель 3 механизма подачи опорных столов, которая, поворачиваясь, доставляет опорный стол 12 с закрепленной на нем пружиной 14 в верхнее положение. При этом измерительный блок 18, который может подыматься и опускаться, занимает верхнее г положение. Измерительный блок 13 получает перемещение от механизма подачи оТюрных столов (не показано). Подвижный 16 и неподвижный 15 патроны-захваты находятся в раскрытом состоянии, т. е. подвижный кулачок 25 смещен относительно неподвижного кулачка 24. При подходе опорного .стола 12 с закрепленной на нем пружиной 14 к позиции испытания на пружину опускается измерительный блок 18, который своими прижимными пластинами 19 с выступами 20 прижимает пружину 14 к опорному столу 12 и точно ее фиксирует. Вращаясь далее, опорный стол 12 i с зафиксированной на нем пружиной 4 с помощью измерительного блока 18 вводит стержни пружины 14 в паз между подвижным 25 и неподвижным 24 кулачками неподвижного 15 и подвижного 16 патронов-захватов. Непрерывно вращаясь, вал 2 от мотора-редуктора через м еханизм 9 прерывистого действия, шестерни 5 и 6 с по- мощью пальца 27, находящегося в замкнутом профильном пазу 28 щестерни 5, перемещает подвижный кулачок 25 к неподвижному кулачку 24 подвижного патрона-захвата 16. Аналогично через щестерни 7 и 8 и палец 27 перемещается подвижный кулачок 25 к неподвижному кулачку 24 неподвижного патрона-захвата 15. После этих операций испытуемая пружина 14 лежит на опорном столе 12, прижатая измерительным блоком 18, стержни пружины введены в неподвижный 15 и подвижный 16 патроны-захваты и зажаты между подвижным 25 и неподвижным 24 кулачкаNm. Прижимные пластины 19 с выступами 20 прижимают пружину 14 к опорному сто.пу 12, измеритель диаметра витков пружяны 23, закрепленный на прижи.мной пластине 19, фиксирует расстояние между опорным столом 12 и поверхностью прижимной luucTiniLi 19, из.меряя диаметр пружины, сигма; от измерителя 23 диаметра витков пружины поступает в схе.му управления авTOM:ITOM. S Вал 2 вращает механизм 11 подъема, выполненный в виде кулачка, который опускает опорный стол 12, и стержни пр жины 14 находятся между подвижным 25 и неподвиж ным 24 кулачками патронов-захватов 15 я 16, при этом прижимная пластина 19 при жата к испытываемой пружине 14 и своими выступами 20 фиксирует крайние витки пружины 14. Измеритель 22 длины навитой части пружины, расположенный на прижимной пластине 19, фиксирует расстояние до упора 21, следовательно, измеряет длину навитой части пружинь; 14, После того, как измеритель 22 длины ,навитой части пружины измерил длину и подал сигна в схему управления автоматом, измерительный блок 18 получает движение от механизма подачи и приподнимается от испытьшаемой пружины 14. Вал 2 передает вращение на механизм Ю нагружения, выполненный в виде кулачка с изменяемым профилем относи-) тельно вала 2, Кулачок 10 переменного профиля воздействует, вращаясь, на неподвижный кулачок 24 подвижного патрона-захвата 16 и перемещает его. Подвижный кулачок 25 перемещается вместе с ; елодвихс1ым кулачко 24 по шлицевому валу 29, закрепленному жестко. Упираясь выступами подвижных 25 и неподвижных 24 кулачков в стержень испытываемой 14, патрон-захват 16, перемешаясь по Еялицевому валу, растягивая ншружает пружину 14. Другой конец пружины зафиксирован в неподвижном патронезахвате 15 и упирается в силоизмерительное устройство 26, закрепленное на выступах кулачков 24 и 25 патрона-захвата 15. В резуль тате воздействия на него силоизмерительное устройство 26 образует электрический сигнал поступающий в схему управления процессом контроля пружин. Во время нагружения изменяется расстоя}ше между патронами-захватами 15 и 16, измеритель 7 длипы между точками нагружеь{ия пружины, закрепленный ка кеподвижном патроне-захвате 15, фиксирует его расстояние равное длине ггружикы 14 между точками нагружения. Достигнув заданной величины де формация испытываемой пруж15ны 14, механизл.Ю нагружения гфоизводит ее разгружение, деформации пружинь 14 определяет применяемый профиль кулачка 10 механизма нагружения. Далее опорный стол 12 под действием кулачка I I мехгтпма подъема приподнимается и упирается з пружину 14. Негферывно вращаясь, вал 2 через механизм 9 прерывистого действия, шестерню 5 к палец 27, скользяпшй в профильном . пазу 28, приподнимает подвижный кулачок 8 25 относительно неподвижного кулачка 24, патрона-захвата 16 и освобождает конеп пру)СИНЫ 14. Аналогично от механизма 9 прерывистого действия шестерни 5-8 через палец 27, сколь зящи в пазу 28, кулачок 25 приподнимается относительно кулачка 24 и Ъсвобождает от захвата второй конец пружины. Опорный стол 12 с пружиной 14, которая поддерживается выступами, имеющимися на опорном столе, через вал 2, механизм 9 прерывистого действия, ведущую шестерню 4, ведомую шестерню-подаватель 3 получает вращение и перемешается с позиции испытания пружин на позицию выгрузки пружин. Отбраковка пружин прогйсходит за счет уп- f равляющего сигнала, поступившего из схемы -правления автоматом на автоматический сортиров атель пружин, содержапшй электромагнит 35 и шторку 37, которая в зависимости от своего положения открывает один из двух выходов из лотка 35 и закрывает другой, посредством чего и сортируются пружины. Одновременно с приходом на позицию выгрузки пружин опорного стола 12 на позицию испытания подается следующий опорньш стол 12 с очередной испытываемой пружиной. Операция контроля повторяется. Электрическая схема управления процессом контроля пружин растяжения работает следующим образом. Измеритель 23 диаметра витков пружины и изг-леритель 22 длины навитой части пружины СВОЙ сигналы подают на элемент И 33. Если сигналы измерителей 22 и 23 соответствуют заданным, то на выходе элемента И 33 появляется сигнал, поступающий в элемент И 3. Если сигна;1ы с измерителпй 22 и 23 отсутствуют или отсутствует один из них (диаметр BSITKOB пружины) или длина навитой части Пружины не соответствуют требуемь м), сигнала на выходе элемента И 33 нет. При нагружении пружины 14 она своим концом надавливает на силоизмерительное устройство 26, закрепленное на выступах подвижного 25 и неподвижного 24 кулачков иеподаижного патрона-захвата 15. Когда величш:а (-игнала силоизмеритгльного устройства 26 отличается от величи1 ы сигнала при нахожде ии пружины 14 в ненагруженном состоя- ши, в измеритель 17 длины пружины между точками нагружения поступает команда о начале отсчета длииы пружит«ы в свободном состоянии (Ь(,) она соответствует задан ной, то поступает сигнал в элемент И 32. При дальнейшем иагружеиии пружины вьщается сигнал h (когда достигается периая точка нагруженмя), поступающий
в рлемент И 30, сюда же поступает сигнал от сююизмерительного устройства 26, если он соответствует заданному, на выходе элемента И -30 появляется сигнал, поступающий в элемент И 32.
При прохождении второй точки нагружения сигнал hj от измерителя 17 длины пружины между точками нагружения поступает в элемент И 31. Сюда же поступает сигнал от силоизмерительного устройства 26. При соответствии сигнала заданному на выходе элемента И 31 появляется сигнал, поступающий в элемент И 32. Если в элемент И 32 приходят сигналы от элементов И 33, 30 и 31 и элемента 17 измерителя длины пружины между точками нагружения ; т. е. при соответствии пружины всем заданным параметрам, на выходе элемента И 32 появляется сигнал, поступающий через линию 34 задержки на электромагнит 35 сортирующего устройства, который связан со щторкой 37. В зависимости от сигнала, поступивщего в
электромагнит 35, щторка 37 в лотке 36 мо жет занять одно из двух положений и направить пружину 14 в один из двух выходов. Так происходит сортировка пружин, попадающих в лоток 36 выброса с опорного стопа . 12 на вьздержавщие и не выдержавщие испытания. -Линия 34 задержки предназначена для того, чтобы создать выдержку времени, необходимую для прохождения пружины 14 по лотку 36 под действием собственного веса до щторки 37.
Техяико-экономическая эффективность заключается в повыщении качества контроля
пружин путем введения измерения диаметра витков и длины навитой части пружины, что позволяет более полно характеризовать механические свойства пружины, и в повыщении производительности контроля пружин
путем полной автоматизации операции контроля качества и сортировки пружин растяжения.
ь
| название | год | авторы | номер документа |
|---|---|---|---|
| Автомат для контроля усилия пружин | 1981 |
|
SU993052A1 |
| ПРУЖИНОНАВИВОЧНЫЙ АВТОМАТ, ЕГО МЕХАНИЗМЫ РУБКИ, ОБРАЗОВАНИЯ УЗЛА, ПЕРЕМЕЩЕНИЯ ЗАГОТОВОК (ВАРИАНТЫ), ИХ УСТРОЙСТВА ЗАХВАТОВ, ПОДВИЖКИ, ОРИЕНТАЦИИ, ЗАЖИМА, КУЛАЧКОВЫЕ СРЕДСТВА | 2002 |
|
RU2199412C1 |
| Способ изготовления цилиндрических спиральных пружин и устройство для его осуществления | 1985 |
|
SU1284645A1 |
| Автомат для контроля усилия пружин | 1984 |
|
SU1154559A2 |
| Устройство для автоматического контроля пружин | 1985 |
|
SU1377627A1 |
| Устройство для посадки саженцев | 1987 |
|
SU1528363A1 |
| СТАНОК ДЛЯ НАВИВКИ СПИРАЛЬНЫХ ПРУЖИН | 1969 |
|
SU250106A1 |
| Устройство для изготовления витых магнитопроводов | 1989 |
|
SU1758780A1 |
| Устройство для съема бобин на текстильной машине | 1989 |
|
SU1675181A1 |
| Установка для непрерывного полученияСпиРАльНО НАВиТыХ ТРуб из лЕНТТЕРМОплАСТОВ | 1978 |
|
SU804487A2 |
1. АВТОМАТ ДЛЯ КОНТЮЛЯ ПРУЖИН РАСТЯЖЕНИЯ, содержащий приводное устройство, связанное с механизмом подачи опорного стола, механизмом прерывистого действия и кулачковым механизмом нагружения пружин, опорный стол, измеритель длины пружины между точками нагруження и силоизмерительное устройство, -отличающийс я тем, что, с целью расширения функциональных возможностей, он снабжен кулачковым механизмом подъема опорного стола, подвижным и неподвижным патронами-захватами, измерителями длины навитой части и диаметра витков пружин и связанными с ними прижимными пластинами, причем кулачковый механизм жестко закреплен на приводном валу, патроны-захваты установлены над опорным столом и связаны с механизмом подачи опорного стола, а прижимные пластины - с механизмом подъема опорного стола. 2. Автомат по п. 1,отличающийс я тем ,что каждый патрон-захват выпол(Л нен в виде подвижного и неподвижного кулачков, смонтированных в общем корпусе.
/4 /(У Фиг.
АПозиция ноншроля 7
Фиг.4
Г4 3v
CPaz.S
Фиг.6
36
Фиг.7
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Авторское свидетельство СССР | |||
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ УПРУГОСТИПРУЖИН | 1972 |
|
SU433365A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Автомат для контроля усилия пружин | 1981 |
|
SU993052A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
