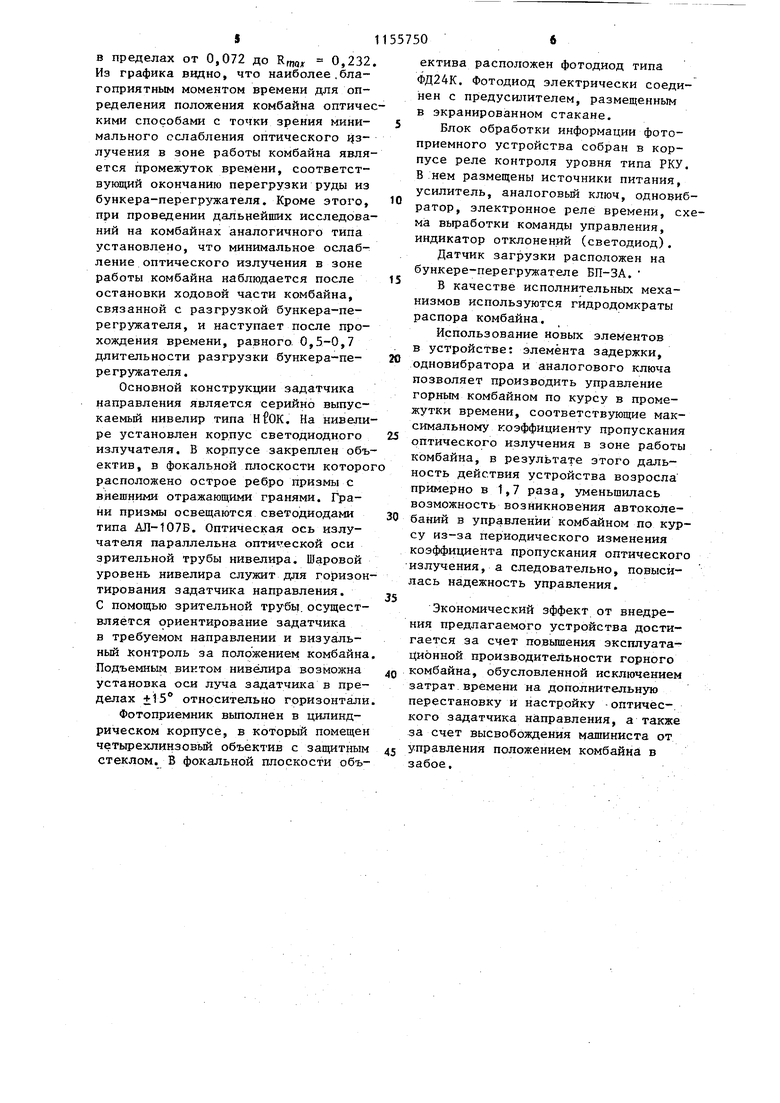
tPtt.l Изобретение относится к горной технике и предназначено для автомати ческого управления горным комбайном бурового типа по заданному курсу, работающего с бункером-перегружател ем. Известно устройство автоматического управления горным комбайном, содержащее оптический задатчик направления и фотоприемное устройство Т. Однако в этом устройстве корректировку положения горного комбайна должен выполнять машинист комбайна и кроме этого, дальность действия его ограничена тем,что в нем не учитывается периодическое изменение коэффициента пропускания оптического излучения в зоне работы горного комбайна. Наиболее близким к предлагаемому по технической сущности и достигаемому результату является устройств автоматического управления горным комбайном, содержащее оптический задатчик направления, оптически свя занный с фотоприемным блоком, выход которого соединен с усилителем, а также два блока управления, причем выходы первого блока управления соединены с входами исполнительных механизмов 2 . Однако устройство характеризуетс ограниченной дальностью действия вследствие недостаточной надежности управления при удалении комбайна от задатчика направления. Это объяс няется тем, что в зоне работы комбайна происходит периодическое изме нение запыленности, связанное с циклическим характером его работы (отбойка руды, остановка комбайна для перегрузки руды с бункера-перегружателя в самоходный вагон). С из менением запыленности изменяется и коэффициент пропускания оптического излучения. При значительном удалении комбайна от источника оптического излучения, задакйцего курс движения комбайна, во время отбойки руды, что соответствует наименьшему коэффициенту пропускания оптическог излучения, может наступить потеря сигнала управления на фотоприемном устройстве, а во время технологичес кой астановки он может быть еще достаточньм для выполнения корректиро ки положения комбайна, вследствие чего могут возникнуть автоколебания управлении положением комбайна что ограничивает дальность действия стройства. Цель изобретения - увеличение альности действия и повышение наежности управления. Поставленная цель достигается тем, что устройство автоматического управления горным комбайном, содержащее оптический задатчик направления, оптически связанный с фотоприемным блоком, выход которого соединен с усилителем,. а также два блока управления, причем выходы первого блока управления соединены с входами исполнительных механизмов, снабжено датчиком загрузки, элементом задержки, однЬвибратором и приводом ходовой части комбайна, причем датчик загрузки соединен через второй блок управления с приводом ходовой части, а через последовательно соединенные элемент задержки и одновибратор - с первым входом аналогового ключа, выход которого подключен к входу первого блока управления, а выход усилителя соединен с вторым входом аналогового ключа. При этом время задержки составляет 0,5 - 0,7 длительности технологической остановки. На фиг. 1 представлена блок-схема .устройства; На фиг. 2 - зависимость коэффициента пропускания оптического излучения в зоне работы комбайна в различные моменты времени технологического цикла. Устройство содержит оптический задатчик направления 1, фотоприемный блок 2, усилитель 3, аналоговый ключ 4, первый блок 5 управления исполнительными механизмами 6, второй блок 7 управления приводом 8 ходовой части Комбайна, датчик загрузки 9, элемент задержки 10, одновибратор 11. Управление комбайном по курсу производства во время технологических остановок (перегрузка руды с бункераперегружателя в самоходньй вагон) и в промежутки времени, когда коэффициент пропускания оптическогЬ излучения достигает максимального значения, объясняется графиком, показанным на фиг 2. График построен на oicHOBe экспериментальных данных. Точка 1 на графике соответствует времени отключения ходовой части комбайна. Участок 1-3 графика характеризует 3 изменение коэффициента оптического излучения во время разгрузки бункер перегружателя, а участок 3-5 - во время работы комбайна по добыче руды. На кривой между точками 1-2 наблюдается увеличение коэффициента пропускания оптического излучения вследствие уменьшения поступления пьши из зоны работы режущего органа бермовых фрез и конвейера комбайна. Горизонтальный участок 2-3 на графи ке соответствует максимальному коэффициенту пропускания оптического излучения Rmax (пылеобразование происходит только в зоне работы кон вейера бункера-перегружателя) и объясняется тем, что в это время наступает динамическое равновесие в поступлении пыли и ее поглощения пыпеотсасывающей остановкой, причем коэффициент пропускания оптичес кого излучения примерно в три раза больше, чем при работе комбайна по добыче руды (участок графика 4-5). В связи с этим наиболее целесообразна корректировкакурса комбай на именно в этот промежуток времени что позволит увеличить дальность действияустройства и повысить надежность управления, так как в этом случае исключается резкое изменение I сигнала управления на фотоприемном устройстве в пределах одного технологического цикла работы комбайна (отбойка руды, разгрузка бункера-пе регружателя) и, следовательно, возникновение автоколебаний в управлении положением комбайна по курсу. Оптический задатчик направления 1 устанавливается в устье выработки а фотоприёмный блок 2 и остальные блоки расположены на горном комбайне, При смещении.комбайна с заданног курса сигнал рассогласования с фото приемного блока 2 поступает на вход усилителя 3, где он усиливается, и поступает на вход аналогового ключа Дальнейшее прохождение сигнала возможно только при наличии разрешающего сигнала на управлякяцем входе аналогового ключа 4. Так как управление комбайном по курсу осуществля : ется во время технологической остановки, то noctynneHHe разрешакяцего сигнала возможно только после отклю чения ходовой части комбайна. Отклю чение ходовой части комбайна произ04водится по сигналу датчика загрузки 9, который поступает на вход второго блока 7 управления приводом 8 ходовой части комбайна. Одновременно с этим подается сигнал на вход элемента задержки 10, причем время задержки составляет 0,5-0,7 длительности технологической остановки комбайна. По истечении заданной выдержки времени элемент задержки 10 подает.сигнал управления на вход одновибратора 11, который, в свою очередь, вырабатьшает разрешающий сигнал заданной длительности, определяемой временем регулирования, и подаат его на управляющий вход аналогового ключа 4. Аналоговый ключ 4 открывается, пропускает усиленный сигнал рассогласования на вход первого блока 5 управления, который вырабатывает команду управления, поступающую на исполнительные механизмы 6, осуществляющие корректировку положения комбайна. Следует отметить, что вне зоны работы комбайна изменение запыпенности средцл ие наблюдается. Визуальньм наблюдением установлено, что запыленность воздуха в зоне работы комбайна в различные моменты времени технологического цикла (отбойка руды, перегрузка руды из бункера-перегружателя в самоходный 1вагон) различна, поэтому проведены измерения коэффициента пропускания оптического излучения для определения его зависимости от времени в различные моменты времени технологического цикла. На фиг. 2 приведен график зависимости коэффициента пропускания оптического излучения R от времени на длине. 15 м вдоль комплекса комбайн бункер-перегружатель. Коэффициент пропускания на длине 15 м определяется для каждого интервала времени как R« П RM где R - коэффициент пропускания на длине 1,5 м, измеренный в десяти точках вдоль комплексаГ с. шаге t.3 м. в результате расчетов определено, что коэффициент пропускания R в зависимости от момента времени технологического цикла ножет изменяться S в пределах от 0,072 до 0,232 Из графика видно, что наиболее ,благоприятным моментом времени для определения положения комбайна оптиче кими способами с точки зрения минимального ослабления оптического злучения в зоне работы комбайна явля ется промежуток времени, соответствующий окончанию перегрузки руды из бункера-перегружателя. Кроме этого, при проведении дальнейших исследова ний на комбайнах аналогичного типа установлено, что минимальное ослабление оптического излучения в зоне работы комбайна наблюдается после остановки ходовой части комбайна, связанной с разгрузкой бункера-перегружателя, и наступает после прохождения времени, равного. 0,5-0,7 длительности разгрузки бункера-перегружателя. Основной конструкции задатчика направления является серийно выпускаемьй нивелир типа , На нивели ре установлен корпус светодиодного излучателя, В корпусе закреплен объ ектив, в фокальной плоскости которо расположено острое ребро призмы с внешними отражающими гранями. Грани призмы освещаются светодйодами типа АП-107Б. Оптическая ось излучателя параллельна опти теской оси зрительной трубы нивелира. Шаровой уровень нивелира служит для горизон тирования задатчика направления. С помощью зрительной трубы.осуществляется ориентирование задатчика в требуемом направлении и визуальный Контроль за положением комбайна Подъемным винтом нивелира возможна установка оси луча задатчика в пределах +15 относительно горизонтали Фотоприемник выполнен в цилиндрическом корпусе, в которьй помещен четырехлинзовьй объектив с защитным стеклом. В фокальной плоскости объ50ектива расположен фотодиод типа ФД24К. Фотодиод электрически соединен с предусилителем, размещенным в экранированном стакане. Блок обработки информации фотоприемного устройства собран в корпусе реле контроля уровня типа РКУ. В нем размещены источники питания, усилитель, аналоговый ключ, одновибратор, электронное реле времени, схема выработки команды управления, индикатор отклонений (светодиод). Датчик загрузки расположен на бункере-перегружателе БП-ЗА. В качестве исполнительных механизмов используются гидродомкраты распора комбайна. Использование новых элементов в устройстве: элемента задержки, одновибратора и аналогового ключа позволяет производить управление горным комбайном по курсу в промежутки времени, соответствующие максимальному коэффициенту пропускания оптического излучения в зоне работы комбайна, в результате этого дальность действия устройства возросла примерно в 1,7 раза, уменьшилась возможность возникновения автоколебаний в управлении комбайном по курсу из-за Периодического изменения коэффициента пропускания оптического излучения, а следовательно, повысилась надежность управления. Экономический эффект от внедрения предлагаемого устройства достигается за счет повышения эксплуатационной производительности горного комбайна, обусловленной исключением затрат.времени на дополнительную перестановку и настройку -оптичес-. кого задатчика направления, а также за счет высвобождения машиниста от управления положением комбайна в забое.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического управления движением проходческого комбайна по заданному курсу | 1985 |
|
SU1317122A1 |
| Устройство управления бункером-перегружателем проходческо-добычного комплекса | 1987 |
|
SU1444515A1 |
| Устройство для управления бункером перегружателем проходческо-добычного комплекса | 1985 |
|
SU1268725A1 |
| Устройство для управления загрузкой бункера-перегружателя проходческо-добычного комплекса | 1983 |
|
SU1176072A1 |
| Устройство для автоматического регулирования загрузки бункера-перегружателя | 1985 |
|
SU1268494A1 |
| Способ разработки месторождений полезных ископаемых подземным способом с использованием тоннелепроходческих механизированных комплексов | 2022 |
|
RU2801989C1 |
| АДАПТИВНЫЙ ЛАЗЕРНЫЙ ДОПЛЕРОВСКИЙ ЛОКАТОР | 1990 |
|
RU2012013C1 |
| ОПТИКО-ЭЛЕКТРОННЫЙ СТРЕЛКОВЫЙ ТРЕНАЖЕР | 1993 |
|
RU2065131C1 |
| СПОСОБ ДОБЫЧИ РУДЫ КАМЕРАМИ НА НАКЛОННЫХ ПЛАСТАХ | 2012 |
|
RU2501950C1 |
| Устройство для определения постоянной времени фотоприемных устройств | 1988 |
|
SU1518682A1 |
1, УСТРОЙСТВО ABTOMATI-I4ECКОГО УПРАВЛЕНИЯ ГОРНЫМ КОМБАЙНОМ, содержащее оптический задатчик направления, оптически связанный с фотоприемньм блоком, выход которого .соединен с усилителем, а также два блока управления, причем выходы первого блока управления соединены с входами исполнительных механизмов, отличающееся тем, что, с целью увеличения дальности действия и повьшения надежности управления, оно снабжено датчиком загрузки, элементом задержки, одновибратором и приводом ходовой части комбайна, причем датчик загрузки соединен через второй блок управления с приводом ходовой части, а через последовательно соединенные элемент задержки и одновибратор - с первым входом аналогового ключа, выход которого подключен к входу первого блока управления, а выход Усилителя (Л соединён с вторым входом аналогового ключа, с 2. Устройство по п. 1, о т л ичающееся тем, что время задержки составляет 0,5 - 0,7 длительности технологической остановки. 01 ел ел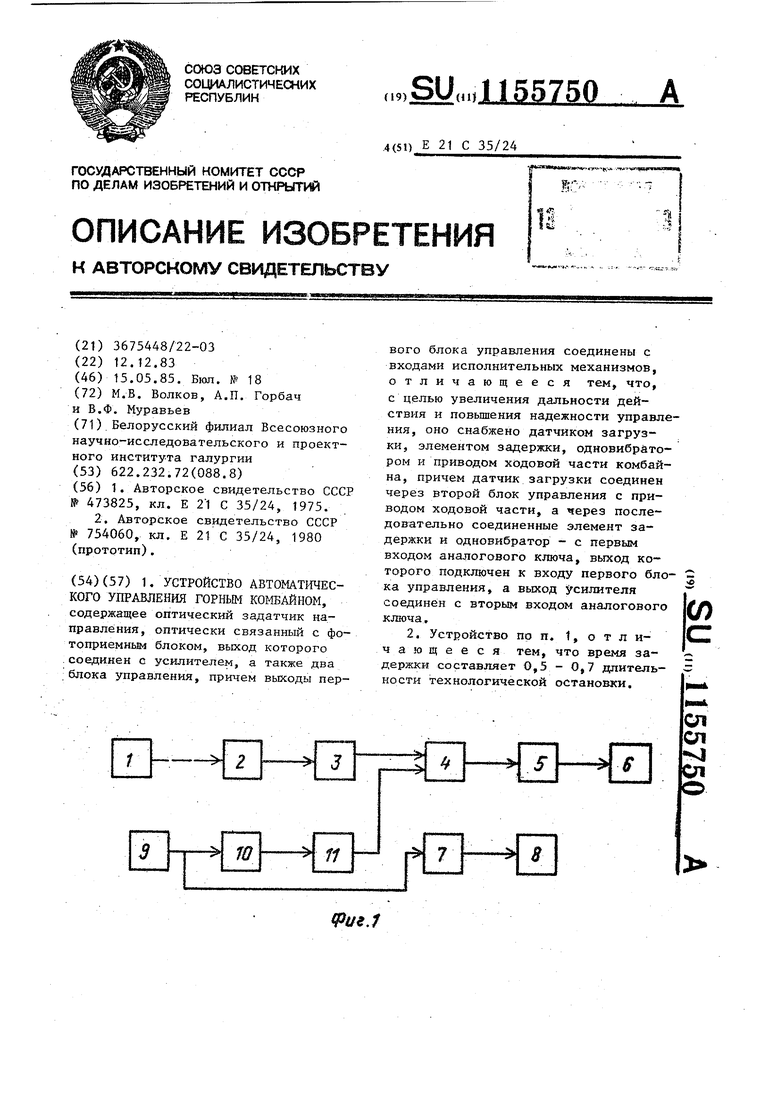
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для контроля положения горнопроходческой машины | 1972 |
|
SU473825A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для автоматического управления положением горнопроходческой машины в плане и профиле пласта | 1978 |
|
SU754060A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
