11
Изобретение относится в; горно-добывающей технике и предназначено для автоматического управления проходческим комбайном по заданному курсу.
Целью изобретения является увеличение дальности прохоясдения оптического луча в условиях высокой запыленности.
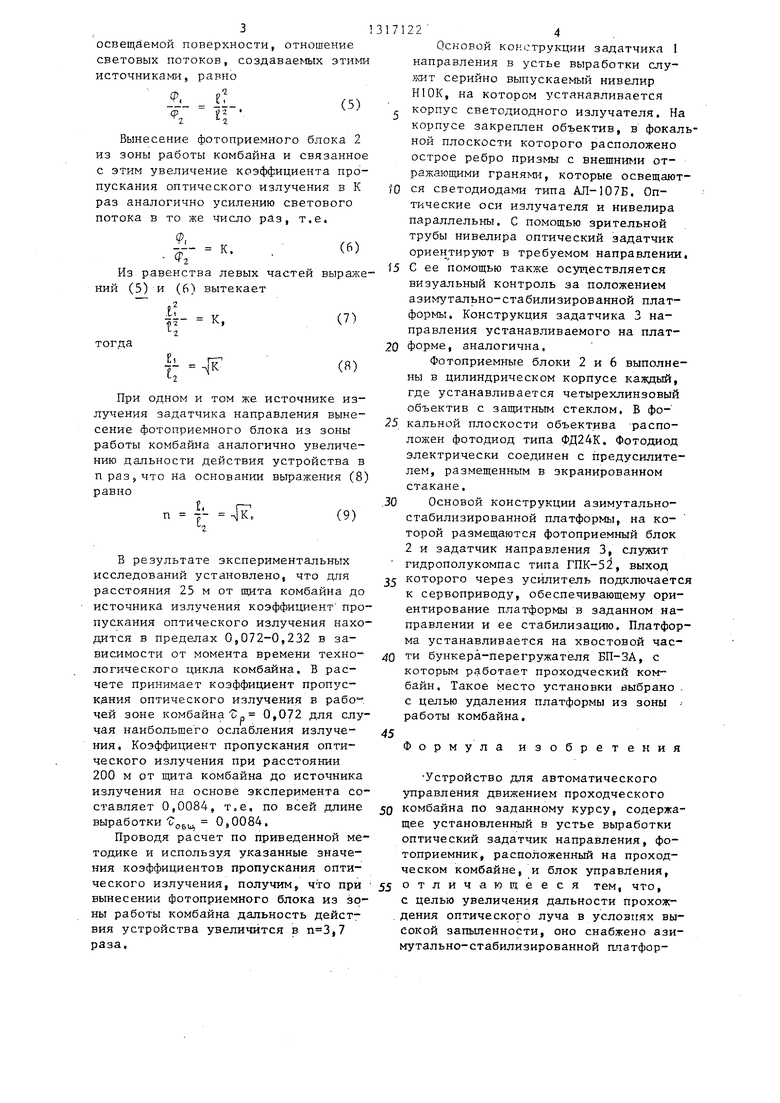
На фиг, 1 показан участок выработки с предлагаемым устройством для автоматического управления движением проходческого комбайна по заданному курсуJ на фиг. 2 устройство автоматического управления с горизонтальны смещением платформы.
Устройство включает оптический за датчик 1 направленияJ расположенньй Б устье выработки, фотоприемный блок 2 и оптический задатчик 3 направления , установленные на азиму- тально-стабилизированной платформе 4, кинематически связанной с проходческим комбайном 5, на котором по помещается фотоприемный блок 6,, оптический задатчик 3 установлен на платформе 4 с горизонтальным смещением в поперечном направлении относительно фотонриемного блока 2 так, что их оптические оси паргшлельны. От оптических задатчиков 1 и 3 па ра.плельно оси штрека 7 направляются лучи, которые регистрируются фотоприемными блоками 2 и 6 соответственно. Фотоприемные блоки 2,6 связаны линиями 8,9 с сумматором 10. Сумматор 10 соединен линией 11 с блоком 12 управления.
Смещение Платформы 4 на расстояние ДХ от оптической оси задатчика 1 направления приводит к появлению на фотоприемном блоке 2 соответствующего сигнала. Аналогично смещение проходческого комбайна на расстояние uY от первоначального положения оптической оси задатчика 3 направления, установлерного на платформе 4, вызывает появление соответствующего сигнала на фотоприемном блоке 6. Тогда абсолютное смещение комбайна относительно оптической оси задатчика 1 для случая, показанного на фиг. 2, составит
uZ ЛУ - йХ. (1)
Знаки смещений X и Y в приведенном выражении определяются их направлением относительно оптической оси за2 2
датчика 1 направления. Сигналы с фотоприемных блоков 2 и 6 передаются на. сумматор 10, выполняющий их алгебраическое с учетом знаков сложение. Сумматор вырабатывает в соответствии с выражением (1) сигнал рассогласования, поступающий далее на блок 12 управления комбайна, включающий соответствующие исполнительные органы.
Поскольку азимутально-стабилизи- рованная платформа кинематически связана с комбайном, то при его движении расстояние от установленного
на нем фотонриемного блока 6 до размещенного на платформе оптического задатчика 3 направления не изменяется и, следовательно, не влияет на дальность действия описываемого устройства.
Всю трассу оптического луча от задатчика направления до фотоприемного блока можно разбить на два участка: участок от задатчика направления , расположенного в устье выработки, до начала рабочей зоны комбайна и участок от начала рабочей зоны до фотоприемного блока, установленного на щите комбайна. Тогда коэффициент пропускания оптического излучения по всей длине выработки можно представить как произведение вида
- -f
оъщ -- п tp U-)
где ), коэффициент пропускания оптического излучения на участке от задатчика направления до рабочей зоны комбайна;
40
р - коэффициент пропускания оптического излучения в рабочей зоне комбайна.
Тогда С
OBbJ, I, «.-..«....
4.5
-Р
(3)
При вынесении фотоприемного блока 2 j установленного на азимутально- стабилизировсшкой платформе, из зоны работы комбайна коэффициент пропус- Q кания оптического излучения увеличится в К раз
. (4)
ОБЦ р
Из фотометрии известно, что при 55 равенстве освещенностей какого-либо участка, создаваемых двумя источниками излучения, находящимися на расстоянии и 2. соответственно от
3
освещаемой поверхности, отношение световых потоков, создаваемых этими источниками, равно fi
(5)
J .
Ч
Вынесение фотоприемного блока 2 из зоны работы комбайна и связанное с этим увеличение коэффициента пропускания оптического излучения в К раз аналогично усилению светового потока в то же число раз, т.е.
-С
(6)
Из равенства левых частей выражений (5) и (6) вытекает
li-К
f7- 1 -2
ElГГ
Г LT
(7)
(Я)
При одном и том же источнике излучения задатчика направления вынесение фотоприемного блока из зоны работы комбайна аналогично увеличению дальности действия устройства в п раз, что на основании выражения (8) равно
.
п f- 4к.
г
(9)
В результате экспериментальных исследований установлено, что для расстояния 25 м от щита комбайна до источника излучения коэффициент пропускания оптического излучения находится в пределах 0,072-0,232 в зависимости от момента времени технологического цикла комбайна. В расчете принимает коэффициент пропускания оптического излучения в рабо чей зоне комбайна Dp 0,072 для случая наибольшего ослабления излучения. Коэффициент пропускания оптического излучения при расстоянии 200 м от щита комбайна до источника излучения на основе эксперимента составляет 0,0084, т,е, по всей длине выработки Од 0,0084.
Проводя расчет по приведенной методике и используя указанные значения коэффициентов пропускания оптического излучения, получим, что при вынесении фотоприемного блока из зоны работы комбайна дальность действия устройства увеличится в ,7 раза.
17122 4
Основой конструкции задатчика 1 направления в устье выработки слу- кшт серийно выпускаемый нивелир Н10К, на котором устанавливается , корпус светодиодного излучателя. На корпусе закреплен объектив, в фокальной плоскости которого расположено острое ребро призмы с внешними отражающими гранями, которые освещают- i O ся светодиодами типа АЛ-107Б. Оптические оси излучателя и нивелира параллельны. С помощью зрительной трубы нивелира оптический задатчик ориен тируют в требуемом направлении,
f5 С ее помощью также осуществляется визуальный контроль за положением азимутально-стабилизированной платформы. Конструкция задатчика 3 направления устанавливаемого на плат20 форме, аналогична.
Фотоприемные блоки 2 и 6 выполнены в цилиндрическом корпусе каждый, где устанавливается четырехлинзовый объектив с защитным стеклом. В фо25 кальной плоскости объектива -расположен фотодиод типа ФД24К. Фотодиод электрически соединен с предусилите- лем, размещенным в экранированном стакане.
.30 Основой конструкции азимутально- стабилизированной платформы, на которой размещаются фотоприемный блок 2 и задатчик направления 3, служит гидрополукомпас типа ГПК-5, выход
которого через усилитель подключается к сервоприводу, обеспечивающему ориентирование платформы в заданном направлении и ее стабилизацию. Платформа устанавливается на хвостовой час40 ти бункера-перегружателя БП-ЗА, с которым работает проходческий комбайн. Такое место установки выбрано . с целью удаления платформы из зоны работы комбайна,
45
Формула изобретения
Устройство для автоматического управления движением проходческого
50 комбайна по заданному курсу, содержащее установленный в устье выработки оптический задатчик направления, фотоприемник, расположенный на проходческом комбайне, и блок управл ения,
55 отличающееся тем, что, с целью увеличения дальности прохождения оптического луча в условиях высокой запьшенности, оно снабжено ази- мутально-стабилизированной апатфор5131
мой, дополнительными оптическим за- датчиком направления и фотоприемником, оптически связанным с оптическим эадатчиком направления, расположенными на азимутально-стабилизиро- ванной платформе, кинематически связанной с проходческим комбайном, при этом фотоприемник комбайна оптичес7122 6
ки связан с дополнительным оптическим задатчиком направления так, что оптические оси оптических задатчиков направления параллельны, при этом вы5 ходы фотоприемников подключены к входам сумматора, установленного на проходческом комбайне, выход которого подключен к блоку управления.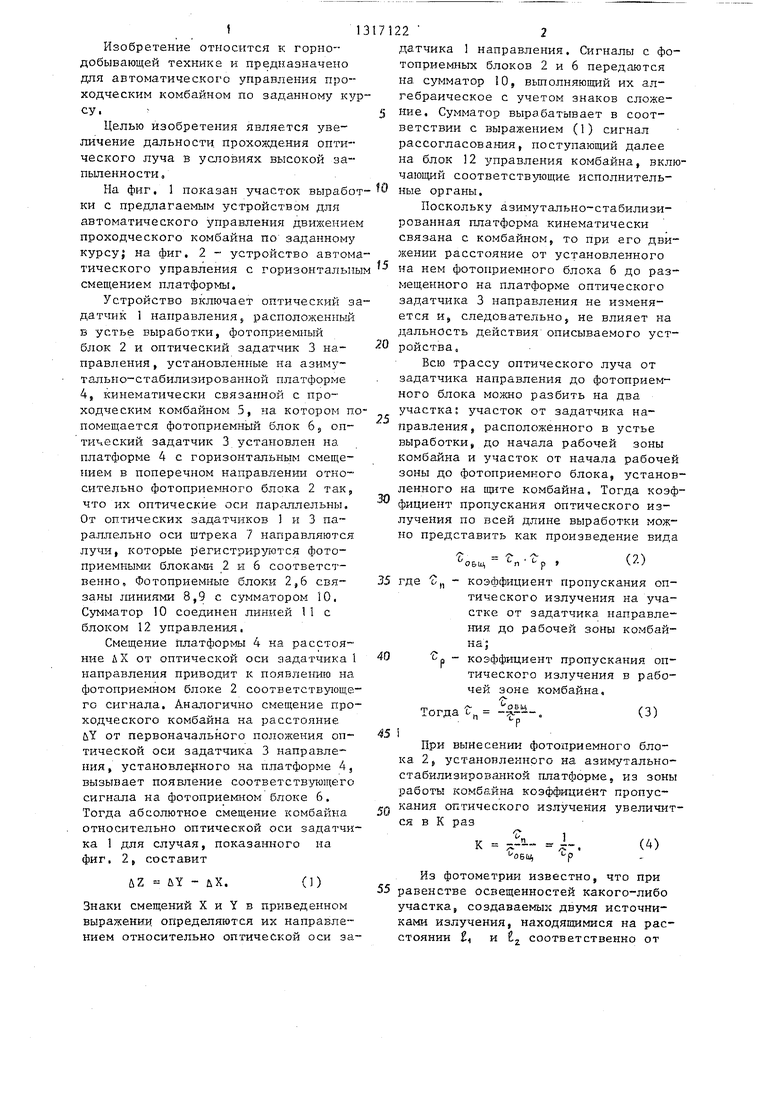
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство автоматического управления горным комбайном | 1983 |
|
SU1155750A1 |
| Система автоматического управления исполнительным органом проходческого комбайна избирательного действия | 1986 |
|
SU1330311A1 |
| ОПТИКО-ЭЛЕКТРОННОЕ УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПОПЕРЕЧНЫХ СМЕЩЕНИЙ | 1993 |
|
RU2066845C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ОПТИЧЕСКИХ И ОПТИКО-ЭЛЕКТРОННЫХ СРЕДСТВ НАБЛЮДЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2524450C1 |
| СПОСОБ ДОСТАВКИ ЛАЗЕРНОГО ИЗЛУЧЕНИЯ НА ДВИЖУЩИЙСЯ ОБЪЕКТ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2541505C2 |
| Система управления движением горной машины | 1975 |
|
SU899931A1 |
| СПОСОБ ДОСТАВКИ ИЗЛУЧЕНИЯ НА ДВИЖУЩИЙСЯ ОБЪЕКТ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2191406C1 |
| УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОГО ИЗМЕРЕНИЯ ВИБРАЦИОННЫХ ПАРАМЕТРОВ ОБЪЕКТА | 2010 |
|
RU2447410C2 |
| МНОГОФУНКЦИОНАЛЬНАЯ ОПТИКО-ЛОКАЦИОННАЯ СИСТЕМА | 2005 |
|
RU2292566C1 |
| СПОСОБ ЛАЗЕРНОЙ ЛОКАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2152056C1 |
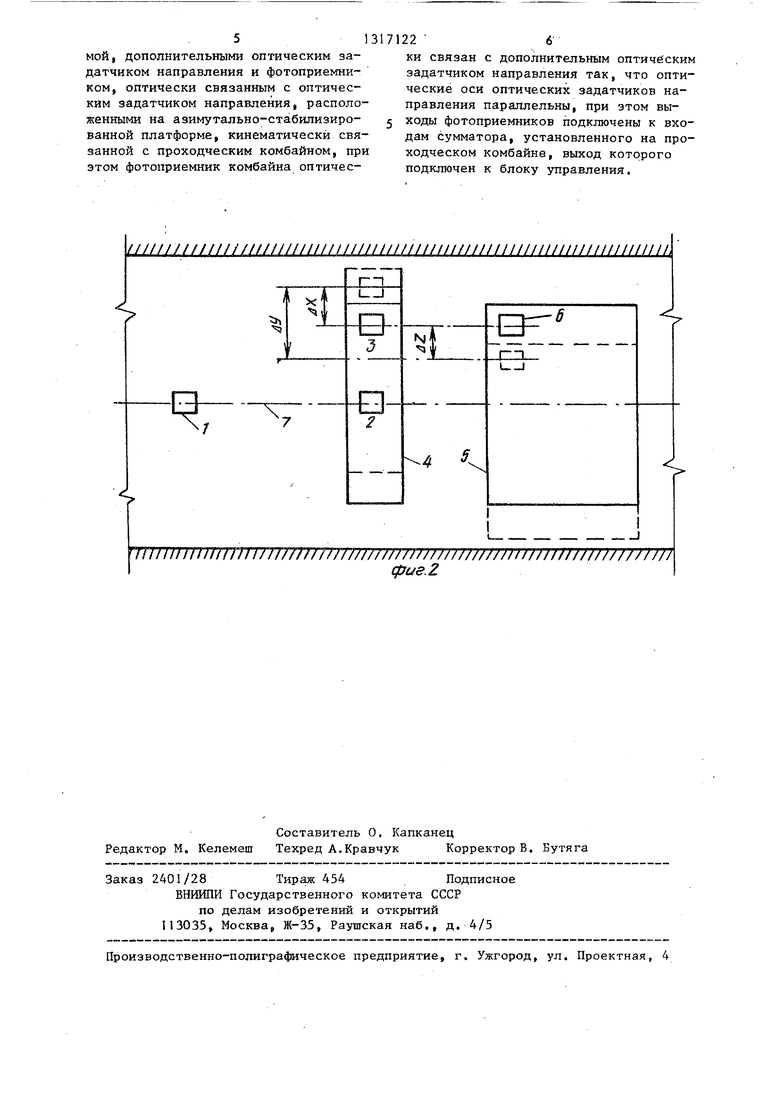
Изобретение относится к горнодобывающей технике и позволяет увеличить дальность прохождения оптичес кого луча в условиях высокой запъшен ности. Устройство содержит два оптических задатчика направления (ОЗН) 1 /////////////////// 7 7 ////Т7 ////// /////// ////////////// (риг.1 и 3 и два фотоприемника (ФП),2 и 6. ОЗН 1 расположен на устье выработки, а ОЗН 3 - на азимутально-стабилизиро- ванной платформе 4, кинематически связанной с комбайном (К) 5. На нем установлен ФП 6, который связан с ОЗН 3 так, что оси ОЗН 3 параллельны. Выходы ФП 2 и 6 подключены к сумматору 10, установленному на К 5. Выход сумматора 10 подключен к блоку 12 управления. Смещение платформы 4 на расстояние дХ от оси ОЗН 1 приводит к появлению сигнала наФП 2. При смещении К 5 на расстояниедУ от оси ОЗН 3 появляется соответствующий сигнал на ФП 6. Абсолютное смещение uZ К 5 от оси ОЗН 1 составляет дг uY-дХ. Сигналы с ФП 2 и 6 поступают на сумматор 10, где вырабатывается сигнал рассогласования, поступающий на блок 12, включающий соответствующие исполнительные органы К 5 . 2. ил. с (Л :3 
| Устройство для автоматического управления положением горнопроходческой машины в плане и профиле пласта | 1978 |
|
SU754060A1 |
| Устройство автоматического управления горным комбайном | 1983 |
|
SU1155750A1 |
