ют на вторые входы элементов И 3 и И 14 и на пусковой механизм 3. С механизма 3 ноступает команда на контакты для включения привода конвейера бункера-перегружателя. При этом сигналы управления на выходе элементов И 13 и 14 отсутствуют, так как сигналы отсутствуют на их первых входах. Ходовая часть комбайна включена. Сигнал с командного блока 2
поступает на элемент И 14, который отключает ДПК 1 на забое. Срабатывает элемент НЕ 12. С элемента И 13 выдается сигнал, запрещающий включение ходовой части комбайна. После прекращения подачи сигнала управления на второй вход, элемента И 13, комбайн подается на забой. Производительность повышается за счет сокращения технологических простоев 7 ил.,
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления бункером-перегружателем проходческо-добычного комплекса | 1987 |
|
SU1444515A1 |
| Устройство для управления загрузкой бункера-перегружателя проходческо-добычного комплекса | 1983 |
|
SU1176072A1 |
| Устройство автоматического управления горным комбайном | 1983 |
|
SU1155750A1 |
| Проходческий комплекс | 1989 |
|
SU1747707A1 |
| Бункер-перегружатель | 1977 |
|
SU703669A1 |
| Устройство для автоматического регулирования загрузки бункера-перегружателя | 1985 |
|
SU1268494A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ СИСТЕМОЙ РУДНИЧНЫХ КОНВЕЙЕРОВ | 2014 |
|
RU2566324C1 |
| СПОСОБ ТРАНСПОРТИРОВКИ ОТБИТОЙ ГОРНОЙ МАССЫ | 2013 |
|
RU2539090C1 |
| СПОСОБ РАЗРАБОТКИ ПОЛЕЗНОГО ИСКОПАЕМОГО | 2012 |
|
RU2501949C1 |
| Бункер-перегружатель | 1976 |
|
SU861654A1 |
Изобретение относится к горному делу и предназначено для управления проходческо-добычными комплексами. Цель изобретения - повышение производительнбсти проходческо-добычного комплекса. Для этого устройство снабжено элементом НЕ 12, элементами И 13 и 14. Выход датчика перемещения колебаний (ДПК) 1 соединен с входом элемента НЕ 12. Вход элемента И 13 подключен к второму входу пускового механизма 3. Выходы элемента И 13 подключены к элементу НЕ 12 и датчику положения самоходного вагона (ДПСВ) 15. Вход элемента И 14 подс (О ключен к вьгходу ДПСВ 15, а выход к ДПК 1. Сигналы с ДПСВ 15 поступа(Л 17 м 19 12 ts О5 00 41 to сд
Изобретение относится к горной технике, точнее к управлению проходческо-добычны ш комплексами, в соетав которых входят горно-проходческий комбайн, бункер-перегружатель и самоходньй вагон. Цепь изобретения - повышение производительности проходческо-добычного комплекса за счет сокрап етп я технологических простоев оборудования, На фи1.1 представлена структурная схема предлагаемого устройства; на фиг. 2 и 3 - фрахмепты схем управления прИБодами проходческо-добычного комплекса; на фиг.4 - 7 - диаграммы, поясняющие работу устройства. Устройство содержит 1 перемещепия комбайна в забое, команд-, ный блок 2, пусковой механизм 3 и привод 4 конвейера бункера-перегружател., пусковой механизм 5 и привод (гидродвигателн 6 и 7) ходовой части комбайна, управляемые контакты 8 пускового механизма 3, управляемые контакты 9 пускового механизма 5, электрогидрораспределители 10 и 11, элемент НЕ 12, первый элемент И 13, второй элемент И 14, датчик 15 пололсения -самоходного вагона. Командньй блок 2 содержит компараторы 16 -- 21, имеющие различные уровни напряжения срабатывания, одновибраторы 22 - 26 с регулируемой длительностью импульсов и элемент ИЛИ 27. Пусковой механизм 5 привода ходовой части комбайна содержит элемент ИЛИ 28 и пускатель 29 привода ходовой части комбайна. Командный блок 2 реализован на микросхемах серии К140 и К511. Устройство работает следутоии образом. После включения подачи комбайна на забой производится загрузка бункера-перегр:,х ателя рудой. При этом привод 4 конвейера бункера-перегружателя отключен. При достижении сигналом с датчика 1 первого заданного уровня командный блок 2 подает сигпал управления зацанцон длительности на пусковой механизм 3, который замыкает управляемые контакты 8 в цепи питания привода 4 конвейера бункераперегругкателя. Происходит перемещение руды в бункере-перегружателе на заданное расстояние. При этом сигнал управления с командного блока 2 на пусковой механизм 5 не поступает, комбайн продолжает работать. При достижении величиной сигнала с датчика I последующих заданных уровней происходит включение конвейера и перемещение руды в бункере-перегружателе аналогично описанному. При расстояниях доставки руды от бункера-перегружат-еля к месту разгрузки, позволяющих самоходному вагону возвратиться к комбайну до окончания загрузки бункера-перегружателя, с делью повышения эксплуатационной производительности проходческо-добычного комплекса предусматривается совмещение загрузки бункера-перегружателя с его разгрузкой. Для этого самоходный вагон воздействует на датчик 15, сигналы управления с которого поступают на вторые входы элементов И 13 и 14 и пускового механизма 3, который своими управляемыми контактами 8 включает привод 4 конвейера бункера-перегруж:ателя, при этом сигналы управления на выходе элементов И 13 и 14 отсутству7от, так как
Т1Я их первых вх1.лах сшналон управления г.сг, л потгому ходовая часть комба11на остается включеилой. Руда с бункерр.-перегр ткателя поступает В самоходнь вагон, и одновременно с этим продолжается добыча.
При достижении величиной сигнала с датчика 1 заданного максимального уровня, что соответствует определенному объему добытой руды, с командного блока 2 поступает сигнал управления на пусковой механизм 5 привода ходовой части комбайна, который размыкает управляемые контакты 9 в цепи электрогидрораспределителей 10 и 11. Электрогидрораспределители 10 и 11 устанавливаются в нейтральное положение, подава масла к гидродвигателям 6 и 7 ходовой части комбайна прекращается, комбайн останавливается . В этом случае остановка комбайна нужна только для очистки цепи конвейера бункера-перегружателя от остатка руды и определяется временем перемещения звена цепи конвейера на длину бункера-перегружателя. Одновременно с подачей сигнала с командного блока 2 на останов ходовой части комбайна подается сигнал на первый вход второго элемента И 14, а так как на втором входе сигнал также присутствует, то с выхода элемента И 14 подается сигнал на обнуление датчика 1 перемещения комбайна в забое. На выходе датчика 1 устанавливается нулевое напряжение, что вызывает срабатывание элемента НЕ 12, и с его выхода сигнал управления поступает на первый вход элемента И 13, а поскольку на его втором входе также присутствует сигнал, то на выходе формируется сигнал, запрещающий включение ходовой части комбайна до отхода самоходного вагона. Одновременно с , этим командный блок 2 подготавливает к включению цепь управления ходовой частью комбайна.
По окончании разгрузки бункера-перегружателя самоходный вагон отъезжает от него, датчик 15 возвращается в исходное положение и отключает пусковой механизм 3 привода 4 конвейеиа бункера-перегружателя, конвейер останавливается. Кроме того, снимается блокировка с пускового механизма 6 привода ходовой части комбайна, так как прекращается подача сигнала управления на второй вход элемента И 13. Комбайн подается на забой. На
68725А
выходе датчика 1 появляется напряжение, что приводит к исчезновению сигняла управления с выхода элемента НЕ 2.
с Последующие циклы управления бункером-перегрхжателем происходят аналогично отесанному, причем за пределами критического расстояния доставки руды к месту разгрузки совмещения
10 операций загрузки бункера-перегружа теля с его разгрузкой не происходит так как комбайн начинает простаивать в ожидании самоходного вагона.
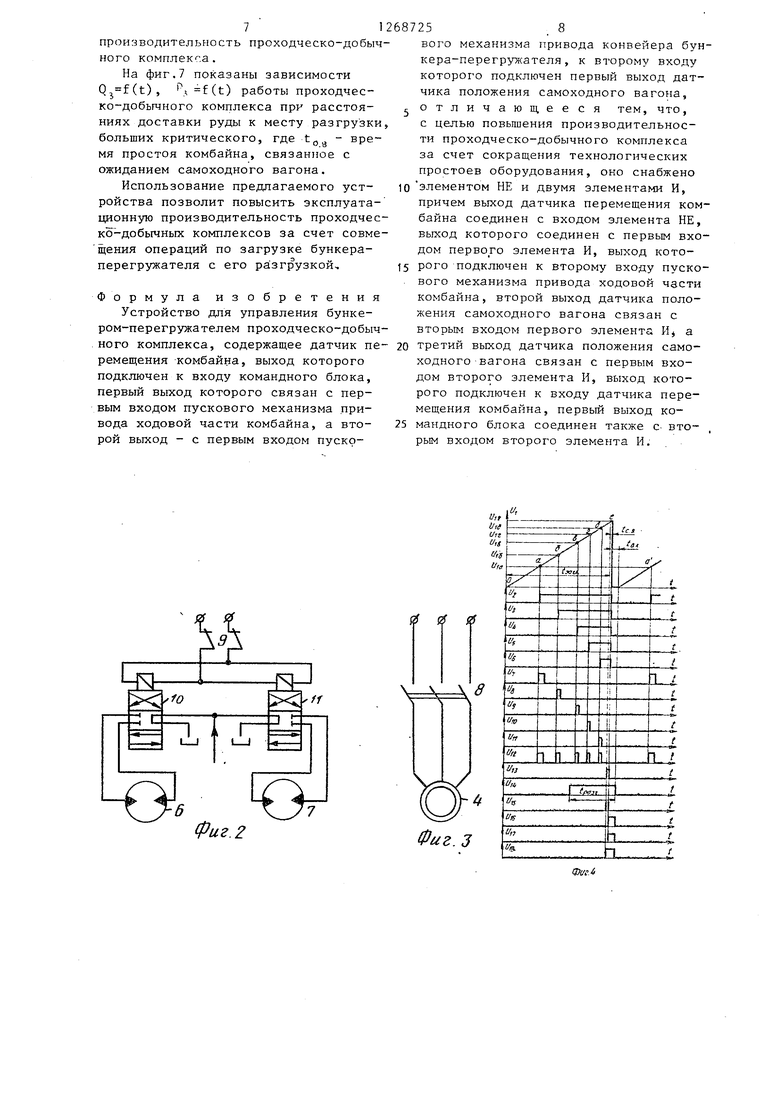
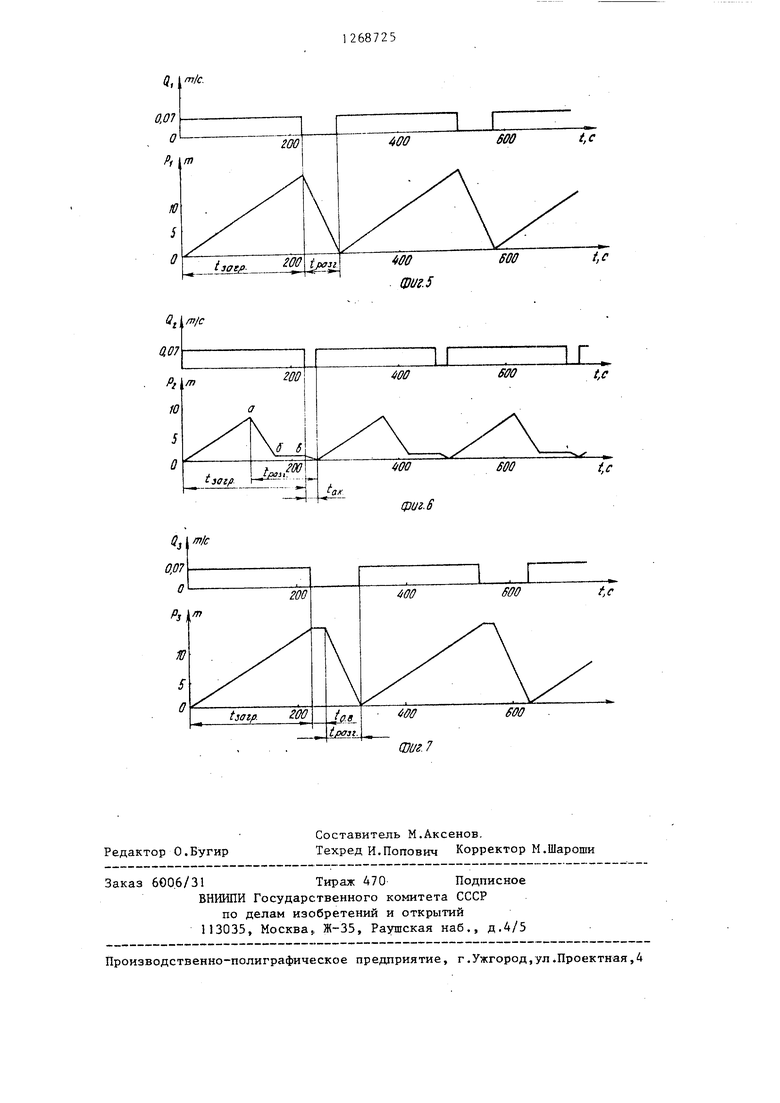
На фиг.4 представлены диаграммы,
15 поясняющие работу устройства при расстоянии доставки руды менее критического, где , - время загрузки бункера-перегружателя; t га..п время разгрузки руды с бункера-перегружа20 теля в самоходный вагон; t, - время очистки цепи конвейера бункера-перегружателя от руды; t, - время, равное времени срабатывания электромагнита датчика 1 перемещения комбайна
25 в забое. I
Порядок работы командного блока 2 следутапшй. При достижении сигналом с датчика 1 величины, соответствующей первому заданному уровню напряжения Ui , срабатывает компаратор 16 (зависимость Uj f(t)) и подает сигнал управления на одновибратор 22, который вьфабатывает импульс заданной длительности (зависимость (t))
35 и подает его на вход элемента ИЛИ 27 . С выхода элемента ИЛИ 27 (зависимость (t)) сигнал поступает в цепь управления пускателем 3 конвейера бункера-перегружателя (схема
0 блока 3 аналогична схеме блока 5). Происходит перемещение руды в бункере-перегружателе . При достижении величиной сигнала с датчика 1 последующих заданных уровней напряже45 ния 11,5 , и, , и,р , и,з работа схемы происходит аналогично описанному. Когда сигнал с датчика 1 достигает величины напряжения Цд , что соответствует полной загрузке бункера50 перегружателя (заданному объему добытой руды), срабатывает компаратор 2 (зависимость U,j f(t)) и подает, сигнал на вход элемента ИЛИ 28, с выхода которого сигнал управления
55 (зависимость (t)) поступает на вход пускателя 29, которьй отключает привод ходовой части комбайна . При расстояниях доставки руды ме нее критического самоходный вагон успевает подойти к бункеру-перегружателю раньше, чем он загружается, и начать перегрузку руды. В этом случае самоходный вагон воздействует на датчик 15, сигналы с которого (зависимость Ц,.-, f(t)) поступают на вторые входы элементов И 13 и 14 и пусковой механизм 3 привода конвейера бункера-перегружателя. Ко вейер начинает перехру кать руду с бункера-перегружателя в самоходный вагон, при этом добыча руды не прек ращается. Когда объем добытой руды равен заданному, по сигналу датчика 1 командный блок 2 подает сигнал (зависимость U,-. f(t)) управления на пусковой механизм 5, который откльачает ходовую часть комбайна,, Одновременно с этим сигнал с блока 2 поступает на первьш вход элемента Г 14, а так как на его втором входе сигнал управления у:ке есть (зависимость и,, f(L))5 то на выходе выраб тывается сигнал (заБисимость U,,j f(t)) на обнуление датчика 1. Так как на выходе датчика 1 напряжение становится равным нулю, срабатывает элемент НЕ 12 и подает сигнал (зависимость и,;, Ff(t;)) на первый вход элемента И 13, на втором входе кото рого присутствует сигнал от датчика 15 (зависимость U., f(t.)). С вькор,а элемента И 13 поступает сигнал (зависимость и,-| f(t)) на пусковой механнзм 5, чем достигается предотвра щение включения ходовой части комба на после обнуления датчика 1, так кяк при этом подагга сигнала с коман ного блока 2 на отключение ходовой части комбайна прекращается (при об нулении датчика 1 командный блок 2 подготовлен к следующему циклу загрузки бункера-перегружателя). После выгрузки руды с бункера-перегружателя самоходный вагон направляется к месту разгрузки, при этом рычаг управления датчиком 15 возвращается в исходное положение, подача сигналов управления на пусковой механизм 3 и элементы И 13 и 14 прекращается Комбайн включается в работу, и начи нается следующий цикл загрузки бункера-перегружателя. Работа проходческо-добычного ком плекса иллюстрируется диаграммами, представленными на фиг.2-4. 56 На фиг.5 предстсшлена диаграмма аботы проходческо-добычного комплекса с использование) известного устойства при расстоянии доставки руды енее критического, где зависимость f(t) характеризует производительность комбайна, зависимость (t) количество руды, находящееся в бункере-перегружателе; t,p - время загрузки бункера-перегружателя, которое равно времени работы комбайна по добыче руды; t, - время разгрузки руды с бункера-перегружателя в самоходньш вагон. Как видно из представленной диаграммы, время простоя комбайна определяется временем разгрузки бункера-перегружателя. На фиг.6 показаны зависимости 2 - характеризующие работу проходческо-добычного комплекса при использовании предлагаемого устройства; где tjj - время очистки цепи конвейера бункера-перегружателя от руды, необходимое для исключения просыпа руды при последующем цикле загрузки; участок о - а характеризует поступление руды в бункер-перегрулсатель, участок а. - 5 характеризует как поступ:ение руды в бункерперегруткатель, так и ее перегрузку в самоходный вагон. Горизонтальность участка обусловлена тем, что количество руды, поступаемое в бун-, кер-перегружатель и разгружаемое в самоходный вагон, одинаково и определяется производительностью комбайна, причем с увеличением расстояния доставки участок б -t стремится к нулю, Участок С) - - характеризует разгрузку бункера-перегружателя после останова ходовой части комбайна. Остановка необходима для очистки цепи конвейера бункера-перегружателя от РУДЫ для исключения просыпа ее при последующем цикле загрузки. Зависимость 2 f(t) при критическом расстоянии доставк - принимает форму зависимости PI f (t) . Как видно из сравнения диаграмм, представленных на фиг.5 и 6, совмещение операций по загрузке и разгрузке бункера-перегружатбд1я при расстояниях доставки руды к месту разгрузки, меньших критического, позволяет сократить простои комбайна под разгрузкой в 4 - 5 раз и, следовательно, повысить эксплуатационную
7I
производительность проходческо-добыч ного комплекГ.а.
На фиг.7 показаны зависимости (t), Л f(t) работы проходческо-добьгчного комплекса при расстояниях доставки руды к месту разгрузки больших критического, где t - время простоя комбайна, связанное с ожиданием самоходного вагона.
Использование предлагаемого устройства позволит повысить эксплуатационную производительность проходчес ко-добычных комплексов за счет совмещения операций по загрузке бункераперегружателя с его ра згрузкой.
Формула изобретения
Устройство для управления бункером-перегружателем проходческо-добычного комплекса, содержащее датчик пе ремещения комбайна, выход которого подключен к входу командного блока, первый выход которого связан с первым входом пускового механизма привода ходовой части комбайна, а второй выход - с первым входом пуско68725. 8
вого механизма привода конвейера бункера-перегружателя, к второму входу которого подключен первый выход датчика положения самоходного вагона, J отличающееся тем, что,
с целью повьппения производительности проходческо-добычного комплекса за счет сокращения технологических простоев оборудования, оно снабжено 10 элементом НЕ и двумя элементами И, причем выход датчика перемещения комбайна соединен с входом элемента НЕ, выход которого соединен с первым входом перво го элемента И, выход кото15 рого подключен к второму входу пускового механизма привода ходовой части комбайна, второй выход датчика положения самоходного вагона связан с вторым входом первого элемента И а
20 третий выход датчика положения самоходного вагона связан с первым входом второго элемента И, выход которого подключен к входу датчика перемещения комбайна, первый выход ко25 мандного блока соединен также с- вторым входом второго элемента И.
8
Фиг.З
т/с.
«,
0.07 О PI т
гоо
600
t,c
400
t
fn/c
07
гоо
fti 10
т
5
,„
600
t,c
00
фиг. 5
г
soo
ш
t,c
00 фиг. 6
f,c
| Устройство для перегружения горной массы на самоходный транспорт | 1972 |
|
SU464502A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Устройство для управления загрузкой бункера-перегружателя проходческо-добычного комплекса | 1983 |
|
SU1176072A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
