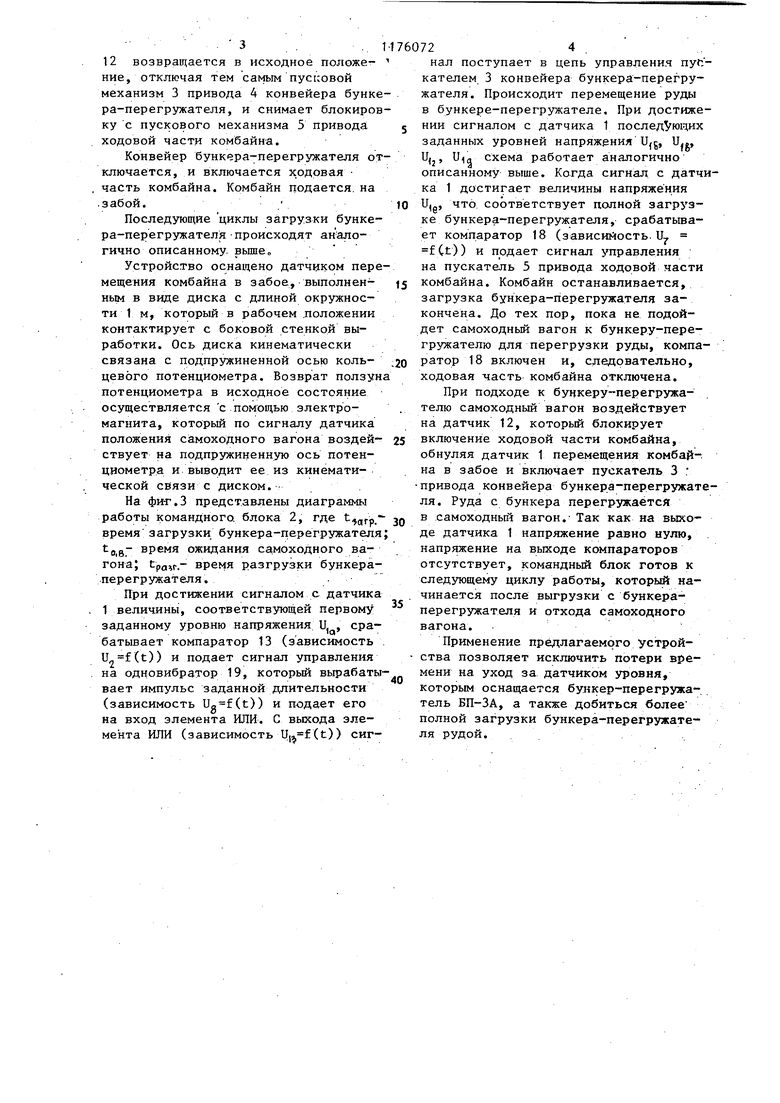
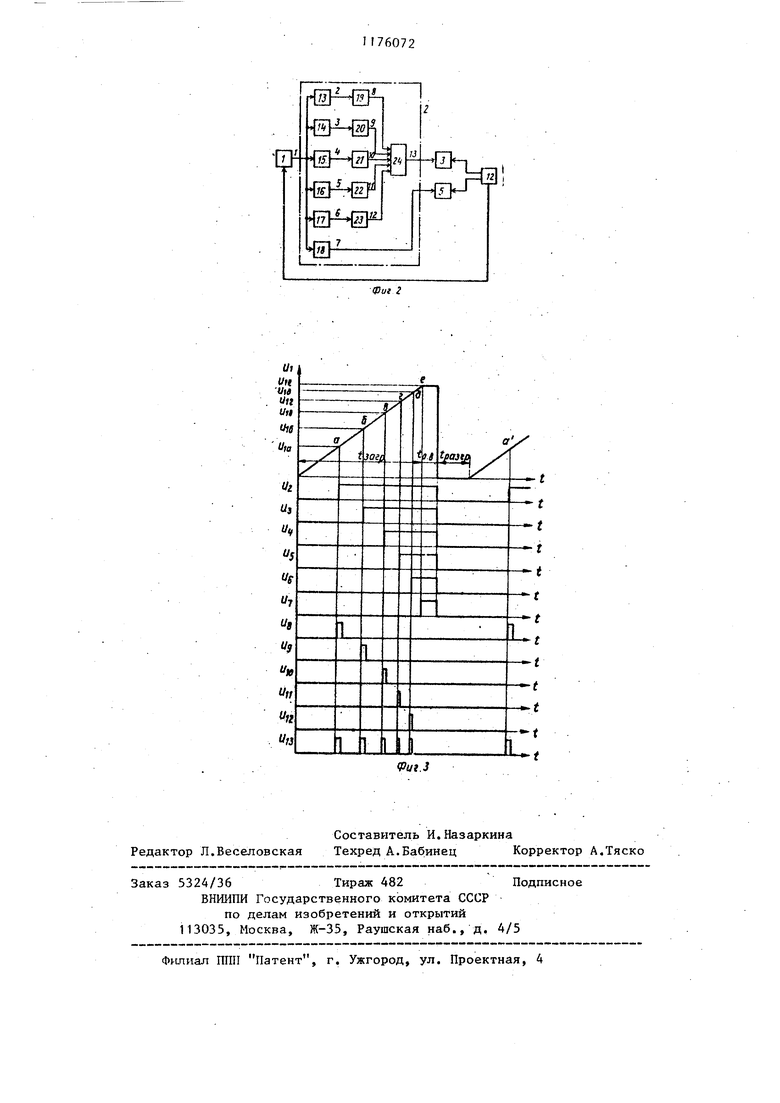
Изобретение относится к горной технике, точнее к управлению проходческо-добычными комплексами, в состав которых входят горнопроходческий комбайн, бункер-перегружатель и самоходный вагоц. . Целью изобретения является оптимизация процесса загрузки бункераперегружателя путем повышения точности управления,. На фиг.. 1 представлена структурна схема устройства5 на фиг.2 - блоксхема командного блока,V на сриг.З диаграмма работы командног.о блока, Устройство содержит. даТчик .1 пе ремещения комбайна, командный- блок 2, пусковой механизм 3 и привод. 4 конвейера бункера-перегружателя, пу ковой механизм 5 и двигатели 6 и 7 ходовой части комбайна, управляемые контакты 8 пускового механизма 3, управляемые конт.акты 9 пускового механизма 5, электрогидрор.аспределители 10 и 11, датчик 12 положения.са.моходного вагона. Гидродвигатели 6 и 7 и электрогидрораспрёделители 10 и 11 образуют привод ходовой час- ти комбайн.а. В состав командного блока входят компараторы 13-18, имеющие разлпчные уровни напряжения срабатывания; одновибраторы 19-23 с регулируемой . длительностью импульсов-, логическая схема ИЛИ 24, Командный блок реализован на микросхемах серии К140, К511. ... Работа устройства для управления загрузкой бункера-перегружателя проходческо-добычного комплекса основана на использовании .зависимости коли чества добытой руды комбайном, обрабатывающим забой постоянного сечения от перемещения его в забое, которое контролируется датчиком 1, Датчик 1 вырабатывает сигнал упропорцкональный пройденному пути, который поступает на ВХОДкомандного блока .2, Командный блок 2 программируется :В зависимости от пути, проходимого комбайном определяющего объем добытой руды, и конструкции приемной части бункера-перегружателя на определённое чис ло включений-привода конв-ейера 4 бункера-перегружателя заданной длительности. Количество и длительность включения привода 4 бункера-перегружателя определяются исходя из обеспечения оптимального заполнения приемной части бункера-перегружателя рудой. После включения подачи комбайна на забой производится загрузка бункера-перегружателя рудой. При этом приард 4 конвейера бункера-перегружателя отключен. При достижении .сигналом датчика 1 первога заданного уровня командный блок 2 подает сигнал управления заданной .длительности на пусковой механизм 3, который . замыкает управляемые контакты С в цепи питания привода 4 конвейера бункера-перегружателя. Происходит.перемещение руды в бункере-перегружателе, необходимое для его дальнейшей загрузки. При этом сигнал управления с командного блока 2 на пусковой механизм 5 управления ходовой частью комбайна не поступает, комбайн продолжает работать. При Достижении сигналом датчика 1 последующих заданных уровней происходит включение конвейера и перемещение руды аналогично описанному. При достижении сигналом датчика 1 заданного максимального уровня, определяемого отрезком, пройденнохо комбайном пути и, следовательно, количеством руды, необходимой для оптимальной загрузки бункера-перегружателя, с командного блока 2 поступает сигнал на пусковой.механизм 5 привода ходовой части комбайна, который размыкает управляемые контакты 9 в цепи электрргидрораспределителей 10 и 11. ЭЬектрогидрораСпределителн 10 и 11 устанавливаются в нейтральное положение, подача масла к гидродвигателям 6 и 7 ходовой части комбайна прекращается, комбайн останавливается, ожидая подхода самоходного вагона. На этом заканчивается полный цикл работы командного блока 2 и, . ственнр, загрузки бункера-перегружателя,I . Самоходный вагон .подходит к бункеру-перегружателю. и воздействует на датчик 12, который включает пусковой механизм 3 привода 4 конвейера бункера-перегружателя, блокирует включение пускового механизма 5 ходовой части ком.байна до окончания разгрузки бункера-перегружателя и подает сигнал на обнуление дат.чика 1 перемещения комбайна в- забое. По окоячании раз- грузки бункера-перегружателя самоходньш вагон отъезжает от него, датчик 12 возвращается в исходное положение, отключая тем caNibiM пусковой механизм 3 привода 4 конвейера бунке ра-перегружателя, и снимает блокиров ку с пускового механизма 5 привода: ходовой части комбайна. Конвейер бункера-перегружателя от ключается, и включается х.одовая часть комбайна. Комбайн подается, на .забой. Последующие циклы загрузки бункера-перегружателя -происходят ан алогично описанному, вьте Устройство оснащено датчиком пере мещения комбайна в забое, выполненным в виде диска с длиной окружности 1 м, который в рабочем .положении контактирует с боковой стенкой выработки. Ось диска кинематически связана с подпружиненной осью коль- цевого потенциометра. Возврат ползун потенциометра в исходное состояние осуществляется с помощью электромагнита, которьй по сигналу датчика положения самоходного вагона воздействует на подпружиненную ось потенциометра и выводит ее из кинематической связи с диском. На фиг.З представлены диаграммы работы командного, блока 2, где времязагрузки бункера-перегружателя время ожидания самоходного вагона; время разгрузки бункераперегружателя. достижении сигналом с датчика 1 величины, соответствующей первому заданному уровню напряжения Ц , срабатывает компаратор 13 (зависимость (t)) и подает сигнал управления на одновибратор 19, который вырабаты вает импульс заданной длительности (зависимость (t)) и подает его на вход элемента ИЛИ. С выхода элемента ИЛИ (зависимость (t)) сигнал поступает в цепь управления пуСкателем 3 конвейера бункера-перегружателя. Происходит перемещение руды в бункере-перегружателе. При достижении сигналом с датчика 1 последующих заданных уровней напряжения , U.,, Ч, схема работает аналогично описанному выше. Когда сигнал с датчика 1 достигает величины напряжения U,g, что соответствует полной загрузке бункера-перегружателя, срабатьшает компаратор 18 (зависимость.U f Ct)) и подает сигнал управления на пускатель 5 привода ходовой части комбайна. Комбайн останавливается, загрузка бункера-перегружателя закончена. До тех пор, пока не подойдет самоходньй вагон к бункеру-перегружателю для перегрузки руды, компаратор 18 включен и, следовательно, ходовая часть комбайна отключена. При подходе к бункеру-перегружателю самоходный вагон воздействует на датчик 12, который блокирует включение ходовой части комбайна, обнуляя датчик 1 перемещения комбайна в забое и включает пускатель 3 . привода конвейера бункера-перегружателя. Руда с бункера перегружается в самоходньй вагон.- Так как на выходе датчика 1 напряжение равно нулю, напряжение на выходе компараторов отсутствует, командный блок готов к следующему циклу работы, которьй начинается после выгрузки с бункераперегружателя и отхода самоходного вагона. Применение предлагаемого устройства позволяет исключить потери времени на уход за датчиком уровня, которым оснащается бункер-перегружатель БП-ЗА, а также добиться более полной загрузки бункера-перегружателя рудой.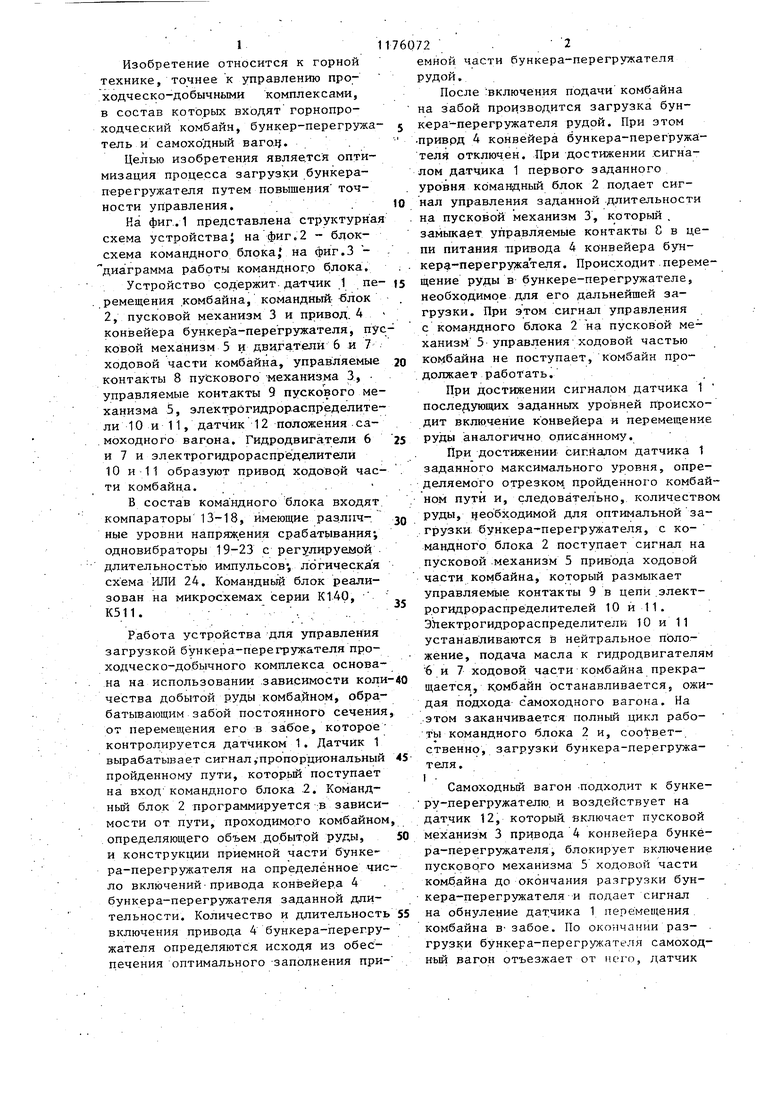
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления бункером перегружателем проходческо-добычного комплекса | 1985 |
|
SU1268725A1 |
| Устройство управления бункером-перегружателем проходческо-добычного комплекса | 1987 |
|
SU1444515A1 |
| Устройство для автоматического регулирования загрузки бункера-перегружателя | 1985 |
|
SU1268494A1 |
| Устройство автоматического управления горным комбайном | 1983 |
|
SU1155750A1 |
| Бункер-перегружатель | 1977 |
|
SU703669A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ СИСТЕМОЙ РУДНИЧНЫХ КОНВЕЙЕРОВ | 2014 |
|
RU2566324C1 |
| Устройство для автоматического регулирования загрузки бункера-перегружателя | 1978 |
|
SU693034A1 |
| Привод конвейерной системы для перегрузки горной массы | 1988 |
|
SU1682264A1 |
| СПОСОБ ДОБЫЧИ РУДЫ КАМЕРАМИ НА НАКЛОННЫХ ПЛАСТАХ | 2012 |
|
RU2501950C1 |
| Бункер-перегружатель | 1989 |
|
SU1668698A1 |
УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ЗАГРУЗКОЙ БУНКЕРА-ПЕРЕГРУЖАТШ1Я ПРО;ХОДЧЕСКО-ДОВЫЧНОГО КОМПЛЕКСА, содержап1ёе датчик положения самоходного вагона, пусковой механизм ходовой части, выход которого соединен с приводом ходовой части, и пусковой механизм конвейера бункера-перегружателя, выход которого соединен с приводом конвейера бункера-перегружателя, отличающееся тем, что, с целью оптимизации процесса загрузки бункера-перегружателя путем повышения, точности управления, устройство снабжено командным блоком и датчиком перемещения комбайна, выход которого подключен к входу командного блока, первый и второй выходы которого подключены к первым входам соответственно пускового механизма конвейера бункераперегружателя и пускового механизма 8 ходовой части, к вторым входам которых подключены соответственно первый и второй выходы датчика положения самоходного вагона, третий выход которого подключен к входу датчика перемещения комбайна.
| Устройство для перегружения горной массы на самоходный транспорт | 1972 |
|
SU464502A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Щелевая кольцевая антенна | 1972 |
|
SU693934A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
