Известен следящий привод нажимного органа гибочного пресса с применением силового гидроцилиндра, следящего золотника, корпус которого укреплен на щтоке гидроцилиндра, и реверсивных золотников с дистанционным управлением.
Предлагаемый следящий привод нажимного органа гибочного пресса обеспечивает гибку деталей, имеющих различный угол пружинения, увеличением каждого рабочего хода нажимного органа на величину обратной упругой деформации детали. Для этого следящий привод снабжен вспомогательным гидроцилиндром с жестко связанным со следящим золотником щтоком, несущим выключатель.
Выключатель при соприкосновении нажимного органа с поверхностью детали включает подачу рабочей жидкости через реверсивный золотник в силовой гидроцилиндр для рабочего хода нажимного органа до замыкания концевого выключателя от упора в двуплечий рычаг.
Двуплечий рычаг связан со щтоком всномогательното гидроцилиндра, причем соотнощение его плеч устанавливают с учетом необходимого увеличения рабочего хода нажимного органа изменением положения опорного щарнира двуплечего рычага.
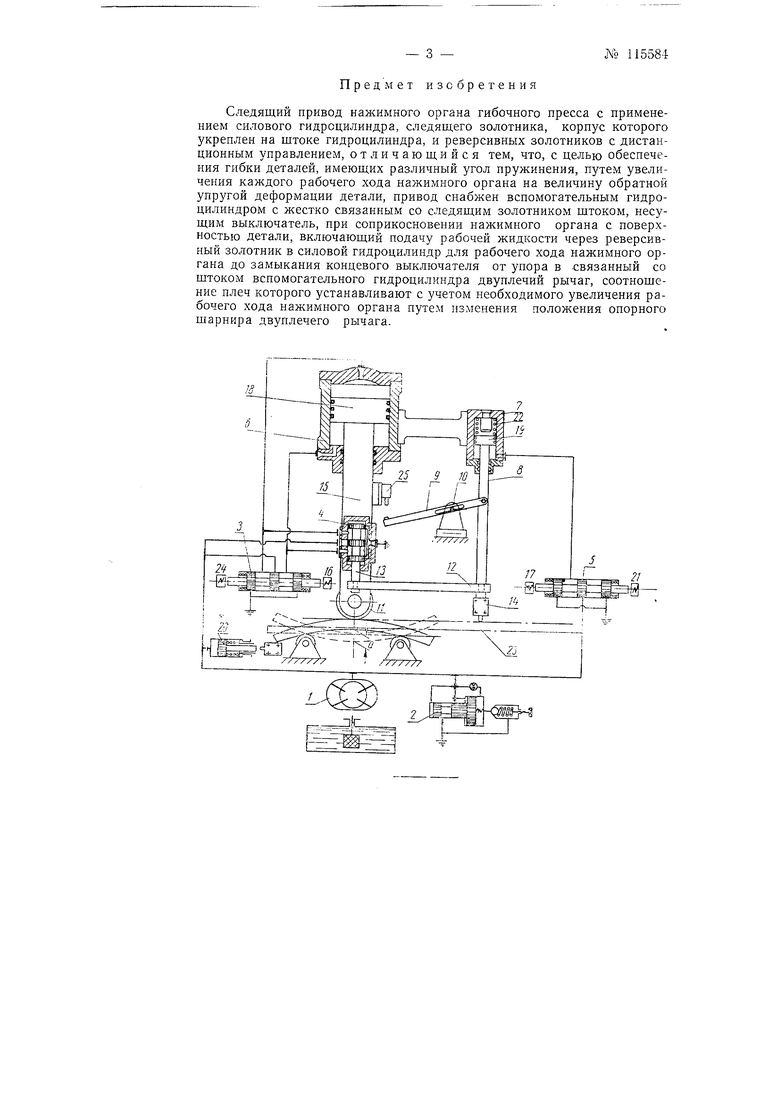
На чертеже изображена схема следящего привода нажимного органа гибочного пресса.
От насоса / жидкость под давлением подводится через предохранительный клапан 2 к трехпозиционному реверсивному золотнику 8 с дистанционным электромагнитным или электрогидравлическим управлением, к основному следящему золотнику 4 и к реверсивному золотнику 5.
К корпусу силового гидроцилиндра 6 жестко прикреплен корпус вспомогательного гидроцилиндра 7, к щтоку 8 которого присоединено плечо двуплечего рычага 9 с опорным шарниром 10. Соотношение плеч двуплечего рычага 9 может быть изменено положением опорного щарнира 10, что в свою очередь изменяет величину рабочего хода нажимного ролика 11. К щтоку 8 прикреплена тяга 12, связанная со щтоком 13 золотника 4. На коиде штока 8 укреплен конечный выключатель 14 с контактным щупом, лежащим в одной плоскости с нижней точкой нажимного ролика 11.
Корпус золотника 4 жестко связан со щтоком 15 силового гидроцилиндра 6.
При включении насоса / жидкость под давлением поступает к золотникам 3, 4 и 5. При нажатии на кнопку «вверх кнопочного управления срабатывают электромагнит 16 золотника 5 и электромагнит 17 золотника 5, жидкость поступает в нижние полости цилиндров 6 к 7, порщень 18 гидроцилиндра 6 поднимается, а порщень 19 гидроцилиндра 7 доходит до упора. В этом положении давление в гидросистеме поднимается, срабатывает электрическое реле 20 давления, электромагниты 16 и 17 выключаются и включается электромагнит 21 золотника 5. Нижняя полость цилиндра 7 соединяется со сливной трубой и щток 8 под действием пружины 22 опускается вместе с тягой 12 и штоком 13 золотника 4. Жидкость под давлением поступает в верхнюю полость силового гидроцилиндра 6, а его нижняя полость соединяется со сливной трубой.
Порщень 18 со щтоком 15 опускается. Вследствие жесткой обратной связи штока 13 с корпусом золотника 4 величина перемещения щтока 15 3 точности равна величине перемещения плунжера золотника 4.
Опускание щтока 8 продолжается до выхода щупа конечного выключателя на уровень 23 плоского профиля. При срабатывании выключателя 14 выключается электромагнит 21 золотника 5 и включается электромагнит 24 золотника 3. При выключении электромагнита 21 плунжер золотника 5 под действием пружины устанавливается в среднее положение, причем нижняя полость цилиндра 7 отсоединяется от сливной трубы и запирается. Шток 8, плунжер золотника 4 и щток 15 останавливаются. Это положение соответствует соприкосновению нажимного ролика 11 с изогнутой поверхностью детали. При включении электромагнита 24 золотника 5 жидкость под давлением поступает в верхнюю полость силового гидроцилиндра 6, нижняя полость которого соединяется со сливной трубой.
Шток 15 с нажимным роликом 11 опускается до тех пор, пока конечный выключатель 25, находящийся на щтоке 15, не замкнется свободным плечом двуплечего рычага 9, который вместе со щтоком 8 остается неподвижным.
При срабатывании конечного выключателя 25 выключается электромагнит 24 и включаются электромагниты 16 и 17. Штоки /5 и S поднимаются, и цикл повторяется.
Первый рабочий ход нажимного ролика // задается на величину а, большую чем величина, задаваемая щаблоном на постоянный заранее установленный настройкой коэффициент. Затем происходит передвижка детали и повторение процесса. После рабочего хода нажимного ролика // на величину а нажимной ролик автоматически поднимается, а профиль детали в силу обратной упругой деформации начинает распрямляться (отпружинивает). В момент отрыва от профиля нажимной ролик останавливается и начинается второй рабочий ход, который задается на величину, большую на тот же коэффициент. По окончании второго рабочего хода нажимной ролик опять поднимается, останавливаясь по окончании пружинения профиля, и задается величина третьего рабочего хода, в зависимости от фактически полученной величины за второй ход. Через несколько рабочих ходов, когда достигается пластический прогиб детали, соответствующий форме щаблона, перемещение нажимного ролика прекращается, включается подача детали, которая, продвинувшись на заданный шаг, подвергается изгибу и правке на следующем ее участке.
| название | год | авторы | номер документа |
|---|---|---|---|
| Валковый гибочный листовой станок | 1957 |
|
SU116035A1 |
| ГИДРОПРИВОД НАЖИМНОГО ОРГАНА СТАНКА ДЛЯ НАКАТКИ ПОВЕРХНОСТИ ДЕТАЛЕЙ | 1969 |
|
SU234083A1 |
| Система управления следящим гидроприводом | 1978 |
|
SU749637A1 |
| Устройство для подачи ленточного материала в рабочую зону пресса | 1977 |
|
SU759183A1 |
| Устройство для автоматического направления сельскохозяйственной машины по борозде | 1987 |
|
SU1510738A1 |
| СТАНОК ДЛЯ ГИБКИ ПРОФИЛЕЙВС?СО:СП:.;АЛ Iттп^-'^1^мш1ц>&^EHSJiHOj^^KA 1 | 1973 |
|
SU369960A1 |
| Устройство для автоматического управления подачей по величине крутящего момента на сверле | 1980 |
|
SU904913A1 |
| Гидропривод подачи стола зуборезного станка | 1977 |
|
SU679344A1 |
| УСТАНОВКА ДЛЯ АВТОМАТИЧЕСКОЙ НАПЛАВКИ | 1973 |
|
SU372046A1 |
| Гидропривод для возвратно-поступательного перемещения рабочего органа | 1982 |
|
SU1106926A1 |