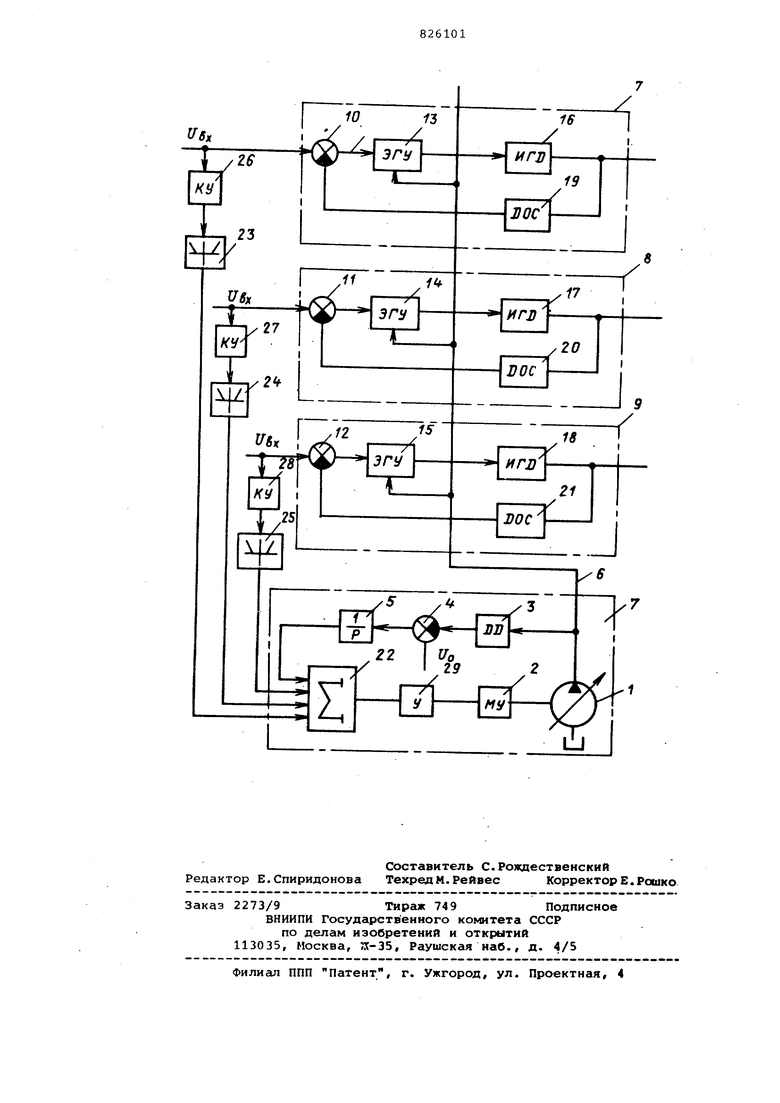
Изобретение относится к гидроавто матике и может быть использовано в промлиленных роботах, манипуляторах и испытательных стендах. Известна система гидроприводов дроссельного регулирования, содержащая источник питания с механизмом управления и с устройством регулирования по давлению в линии нагнетания и,группу подключенных к последней следящих гидроприводов, каждый из которых подключен к независимому задгиэщему устройству 1. Недостатками известной системы являются малые быстродействия и точ ность, в связи с тем, что р переходных процессах из-за изменения давления на выходе источника питания возникает влияние и взаимовлияние гидроприводов через источник питани Цель изобретения - повышение быс родействия и точности. Указанная цель достигается тем, что система снабжена сумматором и нелинейными блоками по числу гидроприводов, при зтом входы сумматора через нелинейные блоки подключены к задающим устройствам и к устройству .регулирования по давлению, а выход к механизму управления источника пи тания, причем устройство регулирования по давлению выполнено в виде последовательно включенных датчика давления, сравнивающего устройства, и интегрирующего блока. На чертеже изобргихена система гидроприводов дроссельного регулирования. Система содержит источник питания - насос 1 с механизмом 2 управления и устройством регулирования по давлению в виде последовательно включенных датчика 3 давления, сравнивающего устройства 4 и интегрирующего блока 5. К линии 6 подключены гидроприводы 7, 8 и 9 дроссельного регулирования, кажоий из которых имеет задающее устройство (не показаны), сравнивающие устройства 10, 11 и 12, электрогидравлические усилители 13, 14 и 15, исполнительные гидродвигатели 16, 17 и 18 и цепь обратной связи с датчиками 19, 20 и 21. Количество гидроприводов может быть иным. Система снабжена суьматором 22, .входы которого через нелинейные блоки 23, 24 и 25 с усилителями 26, 27 и 28 подключены к задающим устройствам, а выход - через усилитель 29 к механизму управления 2.
Система гидроприводов дроссельного регулирования работает следующим образом.
Гидроприводы питаются от общего источника - насОса 1. При подаче входиь1Х сигналов от задающих устройств происходит отработка сигналов гидроприводами. Это ведет к изменению давления в линии 6, датчик 3 подает сигнал на механизм 2 управления. Кроме того, при подаче входного воздействия на гидроприводы, эти сигналы поступают также и к механизму 2 управления насоса 1, что позволяет ускорить необходимое и зменение подачи насоса и тем самым уменьшить рассогласование между подачей насоса и потребляемым гидроприводами расходом. В результате этого, давление в линии 6, при соответствующем выборе параметров системы, практически постоянно, что исключает влияние и взаимовлияние гидроприводов друг на друга через источник питания.
Применение предлагаемого изобретения в промышленных роботах, манипуляторах и испытательных стендах позволяет повысить их быстродействие и точность.
Формула изобретения
Система гидроприводов дроссельного регулирования, содержащая источник питания с механизмом управления - и с устройством регулирования по давлению в линии нагнетания, и группу подключенных к последней следящих гидроприводов, каждый из которых подключен к независимому задающему устройству, отличающаяся
0 тем, что, с целью повышения быстродействия и точности, система снабжена сумматором и нелинейными блoкa JIи по числу гидроприводов, при этом входы сумматора через нелинейные
5 блоки подключены к задающим устройствам и к устройству регулирования по давлению, а выход - к механизму управления источника питания, причем устройство регулирования по давлению
0 выполнено в виде последовательно
включенных датчика давления, сравнивающего устройства и интегрирующего блока.
5 . Источники информации,
принятые во внимание при экспертизе
1. Данилов 10.Л. Теория и устройство манипуляторов. М., Наука, 1973, с. 35, рис. 66.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система гидроприводов дроссельного регулирования | 1983 |
|
SU1155991A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД СИСТЕМ УПРАВЛЕНИЯ РАКЕТ И УСТАНОВОК ВООРУЖЕНИЯ | 2005 |
|
RU2295699C1 |
| Следящая система | 1983 |
|
SU1142811A1 |
| Следящий гидропривод дроссельного регулирования | 1974 |
|
SU585320A1 |
| Диагностируемый электрогидравлический силовой следящий привод | 1987 |
|
SU1539729A1 |
| Устройство управления манипулятором робота | 2018 |
|
RU2701459C1 |
| Система управления | 1983 |
|
SU1120283A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СЛЕДЯЩАЯ СИСТЕМА | 1984 |
|
SU1285953A1 |
| Гидравлический источник питания | 1979 |
|
SU981712A1 |
| Нелинейное корректирующее устройство | 1987 |
|
SU1536351A1 |