сл ел
со СО Изобретение относится к автоматизации технологических процессов и может найти 1фименение при управлении мииркуляционны ми процессами в металлургической, горноруд ной и химической промышленностях. Цель изобретения - повышение точности системы, т.е. уменьшение ее ошибки регулирования. На чертеже. представлена блок-схема (Я1стемы. / Блок-схема содержит, объект управления с рециклом 1, усилитель 2, прямой канал регулирования 3, блок обратной связи 4, сумматоры 5 и 6, исполнительный механизм 7, первый и второй датчики регулируемого параметра. 8 и 9, корректирующий фильтр 10, сумматор 1, измеритель рассогласования 12, формирователь сигнала управления 13, задапик 14. На чертеже обозначено: X х выходной сигнал задат ка, X - регулируемая величина, F - сигнал воз 4ушения. Объект управления с рециклом 1 содержит усилитель 2, прямой канал регулироваиия 3, блок обратной связи 4 и сумматоры 5 и 6. Система работает следуюишм образом. Сигнал задания X ах с выхода задатчика 14 поступает на первый вход измерителя рас согласования 12, на второй вход которого поступает сигнал Ue с выхода первого датчика- регулируемого параметра 8, величина ко торого пропорциональна регулируемой величин X. На выходе измерителя рассогласования 2 формируется сигнал Ujj вида U,i. - Х -М который поступает на вход формирователя сигнала управления 13. На выходе формиров теля сигнала управления 13 формируется сигнал Ц вида U. W,,- где W, передаточная функция формирователя сигнала управления 13, поступаюпщй на вход сумма тора 11, на другой вход которого постзшает сигнал Ц, с выхода корректирующего филь тра 10. На выходе cy 4мatopa 11 формируетс сигнал и« вида и„ U«+ U, который поступает на вход Исполнительного механизма 7. На выходе исйолиительиого механизма 7 формируется сигнал U вида lif Wy U где W;- - передаточная функция исполнитель ного механизма 7, поступающий на вход , объекта управлеиия с рециклом 1. На входы сумматора 6 объекта управлени с рециклом I подаются сигнал Ц,, сигнал возмущений F, а на его выходе формируется сигнал Us вида (, U F, который поступает на вход силителя 2. На выходе усилителя 2 формируется сигнал 0 вида Ui KiUs, где Ki - коэффициент усиления усилителя 2. Выходной сигнал усилителя 2поступает на первый вход сумматора 5, на второй вход которого поступает сигнал U с выхода блока обратной связи 4. На выходе сумматора 5 формируется сигнал U вида Uy Uj. U4, который поступает на вход прямого канала регулирования 3. На выходе прямого канала регулирования 3формируется сигнал Uj W,, Us где Wy - передаточная функция прямого канала регулирования 5, являющийся регулируемой величиной X, т.е. О X , и поступающий па входы блока обратной связи 4 и первого датчика рег)-лируемой величины 8. На выходе датчика регулируемой величины 8 формируется сигнал Ue вида U в We U) W. k X, где Wfl - предаточная функция датчика регулируемого параметра 8, поступающий на второй вход нзмерителя рассогласования 12. На выходе блока обратной связи 4 формируется сигнал и вида U W4 X, где W - передаточная функция блока обратной связи 4, поступающий на второй вход сумматора 5 и на вход второго датчика регулируемого параметра. На выходе датчика регулируемого парамет ра 9 формируется сигиали9 вида Uq W} U4. где Wj - передаточная функ-1 ия датчика, регулируемого параметра 9, поступающий на . корректирующего фильтра 10. На выходе корректирующего фильтра 10 формируется сигнал Ц вида WM U, где WIQ - передаточиая функция корректирующего фильтра 10. Передаточная функция корректирующего 4 1пьтра 10 выбирается из условия инвариантности вида Wi+ , откуда видно, что она имеет вид )V, и не зависит от нестацирнарности параметров объекта управления с рециклом 1 (т.е. от Wf.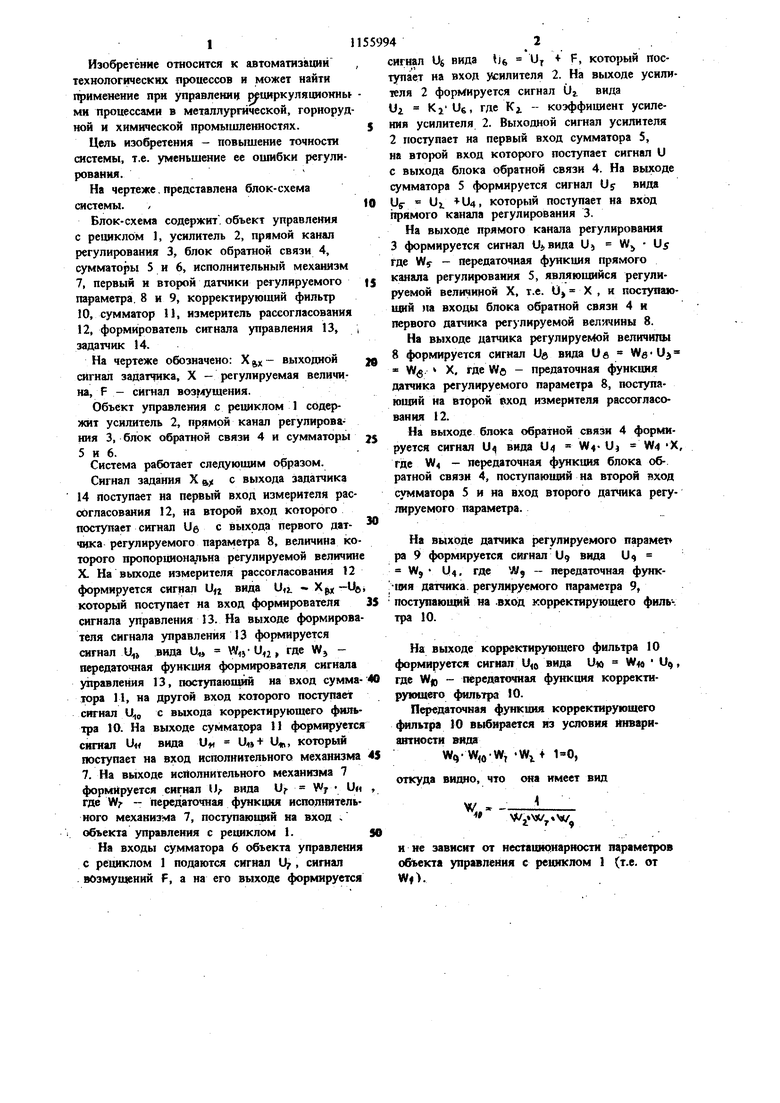
| название | год | авторы | номер документа |
|---|---|---|---|
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1339494A1 |
| Самонастраивающаяся система комбинированного регулирования | 1985 |
|
SU1254433A1 |
| Частотно-импульсный регулятор | 1985 |
|
SU1287100A1 |
| Система автоматического регулирования с компенсацией помех | 1980 |
|
SU941922A1 |
| Самонастраивающаяся система комбинированного регулирования | 1987 |
|
SU1509828A1 |
| Адаптивная система управления потенциально опасным объектом | 1987 |
|
SU1513416A1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД | 1994 |
|
RU2060530C1 |
| Адаптивная система управления потенциально опасным объектом | 1987 |
|
SU1423977A1 |
| Электрогидравлический следящий привод | 1986 |
|
SU1399521A2 |
| Самонастраивающийся электропривод | 1985 |
|
SU1247831A1 |
СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ РЕЦИРКУЛЯЦИОННЫМ ПРОЦЕССОМ, содержащая тоследовательно соединенные задатчик, измеритель рассогласования, формирователь сигйала управления, сумматор и исполнительный механизм, сое)Ц1нетп т выходом с входом объекта правления с рециклом, подключенный первым выходом через первь{й датчик регулирования параметра к второму входу измерителя рассогласования, и корректирующий фильтр, соединенный выходом с вторым входом сумматора, о т личаю шаяся тем, что, с целью повышения то Ьюсти системы, в ней дополнительио установлен второй дагтк регулируемого параметра, входом соеданенный с вто рым выходом объекта ут1 юлеж1Я с рецкклок, а выходом - с BXOjDtoM фильтра.
| Солодовников В.В | |||
| Теория автоматического регулирования | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Видоизменение прибора для получения стереоскопических впечатлений от двух изображений различного масштаба | 1919 |
|
SU54A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ РЕЦИРКУЛЯЦИОННЫМИ ПРОЦЕССАМИ | 0 |
|
SU371560A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Устройство станционной централизации и блокировочной сигнализации | 1915 |
|
SU1971A1 |
