(5) ЦИФРОВАЯ СИСТЕМА РЕГУЛИРОВАНИЯ ЭЛЕКТРОПРИВОДА
| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровая система для позиционногоРЕгулиРОВАНия | 1979 |
|
SU824147A1 |
| Система позиционирования электропривода с энергетической оптимизацией при двухзонном регулировании скорости | 1991 |
|
SU1820361A1 |
| Цифровая система для позиционного регулирования | 1984 |
|
SU1198460A1 |
| Цифровая система для позиционного регулирования | 1985 |
|
SU1280572A1 |
| Система позиционирования с двухзонным регулированием скорости электропривода | 1991 |
|
SU1798765A1 |
| Устройство управления безупорным мерным резом полосы | 1978 |
|
SU774832A1 |
| Система управления приводом летучих ножниц | 1984 |
|
SU1260121A1 |
| Цифровая система для позиционирования электропривода постоянного тока | 1987 |
|
SU1553955A1 |
| Цифровое устройство для программного управления | 1983 |
|
SU1149220A1 |
| Позиционный электропривод | 1983 |
|
SU1124255A1 |
1
Изобретение относится к автоматйческому управлению и регулиррванию электропривода и может быть использовано в системах позиционирования высокой точности.
Известна цифровая система позиционирования, содержащая датчик перемещения и реверсивный счетчик, аналоговый нелинейный преобразователь с параболической характеристикой,спрямленной в начальной масти tl.
Основным недостатком системы является наличие погрешности позиционирования, вызванной статизмом системы и влиянием нестабильности ее элементов.
Наиболее близкой к изобретению по технической сущности является система регулирования, содержащая сумматор , первый вход которого соединён с блоком задания перемещения, второй вход соединен с выходом реверсивного счетчика импульсов, а выход - с входом функционального преобразователя код-частота, и последовательно
соединенные блок ограничения разностной частоты, интегратор, цифро-аналоговый преобразователь, блок регулирования и двигатель, вал которого механически связан с импульсным датчиком перемещения, выход которого через формирователь импульсов соединен с входом реверсирного счетчика импульсов и первым Входом блока ограничения разностной частоты, второй вход которого соединен с выходом функционального преобразователя код-частота 21
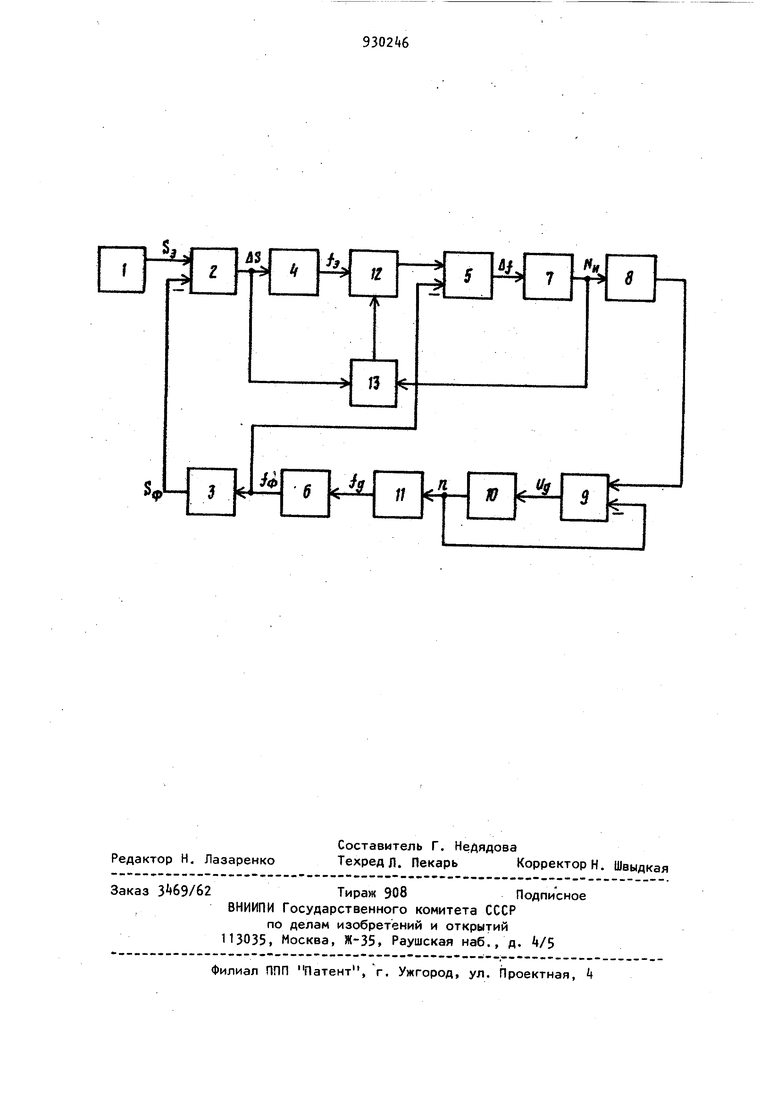
Основным недостатком системы является наличие перерегулирования по положению, которое не всегда допустимо по технологии работы механизма, а также приводит к ударам при -выборе люфтов в механической части привода и возникновению автоколеба НИИ. Для получения апериодического процесса позиционирования наклон линейного участка характеристики преобразователя код-MacToja необходимо уменьшить, что приводит к затягива393нию переходно о процесса и существен ному увеличению времени регулирования. Данная система не может обеспечить высокое качество позиционирования при различных значениях статического момента и момента инерции движущихся масс. Цель изобретения - повышение каче ства регулирования сиатемы. Указанная цель достигается тем, что в нее введены управляемый ключ и, блок сравнения кодов, первый и второй входы которого соединены соответственно с выходом сумматора и вы ходом интегратора, а выход с управляющим входом ключа, информационный вход которого соединен с выходом функционального преобразователя кодчастота, а выход - с вторым входом блока ограничения разностной частоты. На чертеже приведена блок-схема цифровой системы регулирования элект ропривода. Система содержит блок 1 задания перемещения, сумматор 2, реверсивный счетчик 3 импульсов, функциональный преобразователь код-частота ,блок 5 ограничения разностной частоты, формирователь 6 Импульсов, интегратор 7, цифро-аналоговый преобразователь 8, блок 9 регулирования, двигатель 10, импульсный датчик 11 переме щения, управляемый ключ 12 и блок 13 сравнения кодов. Система работает следующим образом. . В исходном .состоянии на выходе блока 1 задания перемещения код заданного положения Srj равен нулю, реверсивный счетчик 3 импульсов и . интегратор 7 находится а нулевом состоянии. Сигнал задания скорости UJ на выходе цифро-аналогового преоб разователя 8 равен нулю и двигатель 10 электропривода находится в состоянии покоя. Введенный в блок 1 задания переме щения код заданного положения S по дается на первый вход сумматора 2. Н выходе сумматора 2 возникает код рас согласования &S. Сумматор 2 предназначен для вычис ления в цифровой форме разности л5 между заданным и фактическим положением механизма, а также для ограниче ния величины этой разности до значения ДЗ, соответствующего максимальному уровню заданной скорости перемещения механизма. Так как при этом код д5 больше кода на выходе цифрового интегратора 7-Nf, то на выходе блока сравнения кодов появляется единичный сигнал, открывающий ключ 12(К). Код дS подается на вход функционального преобразователя А, на выходе которого при этом возникают импульсы, следующие с частотой f2. Импульсы частоты f, поступают через ключ 12 на второй вход блока 5 ограничения разностной частоты. На его выходе возникают импульсы, частота следования которых не превышает некоторого максимального значения л f |, определяемого заданным темпом разгона электропривода. Вырабатываемые бло«ом 5 ограничения разностной частоты импульсы суммируются в цифровом интеграторе 7, выходная величина которого Н преобразуется в цифро-аналоговом преобразователе 8 в напряжение задания скорости U,j, которое подается на вход блока 9 регулирования скорости. При этом двигатель 10 начинает разгоняться, а импульсный датчик перемещения 11 начинает выдавать импульсы, частота следования которых пропорциональна скорости вращения двигателя. Эти импульсы через формирователь 6 подаются на первый вход БОРЧ и являются сигналом обратной связи в цифровом контуре регулирования скорости.. Импульсы с выхода формирователя 6 подаются также на вход реверсивного счетчика 3, производящего их алгебраическое суммирование. При этом код 5ф на выходе счетчика 3 представляет собой фактическое положение механизма и является сигналом обратной связи в цифровом контуре регулирования положения разгон электропривода продолжается до тех пор, пока частота fф не станет равной f, а движение на установившейся максимальной скорости имеет место в том случае, если к мо-; менту окончания разгона величина рассогласования по положению л S превышает значение д5, соответствующее максимальному значению задающей частоты fw. В процессе обработки заданного перемещения величина рассогласования по положению д5, а следовательно, и величина задающей частоты f ,5, уменьшаются. При достижении соотношения знак разностной частоты становится отрицательным, и цифровой интегратор 7 работает в режиме вычитания импульсов. Код Nр на выходе цифрового интегратора 1, а следовательно, и сигнал задания Скорости U навыводе цифро-аналогового преобразователя уменьшаются и электропривод замедляется с темпом, определяемым характеристикой функционального преобразователя код-частота .
При достижении равенства на выходе блока 13 сравнения кодов появляется нулевой сигнал, закрывающий ключ 12. При этом контур регулирования положения размыкается, а движение электропривода до заданного положения осуществляется при помощи контура интегрального регулирования скорости за счет сигнала NTI на цифровом интеграторе Код N ввиду отсутствия импульсов на выходе ключа 12, в дальнейшем до окончания торможения, в точности равен по величине, рассогласования Д5.
К моменту достижения электроприводом заданного положения код Н, становится равным нулю, и привод останавливается. При этом контур интегрального регулирования скоррсти обеспечивает плавный подход привода к заданному положению, т.е. при этом формируется апериодический процесс позиционирования без уменьшения наклона линейного участка характеристики, вызывающего затягивание переходного процесса и увеличение времени регулирования.
Таким образом, в результате отклонения контура регулирования положения и продолжения позиционирования при помощи контура интегрального регулирования скорости обеспечивается высокое качество переходного процесса регулирования положения электропривода, что, в случае применения
данной системы,-позволит получить значительный технико-экономический эффект.
Формула изобретения
Цифровая система регулирования электропривода, содержащая сумматор, первый вход которого соединен с блоком задания перемещения, второй вход соединен с выходом реверсивного счетчика импульсов а выход - с входом функционального преобразователя код-частота, последовательно соединенные блок ограничения разностной частоты, интегратор, цифро-анаЛо говый преобразователь, блок регулирования и двигатель, вал которого механически связан с импульсным датчиком перемещения, выход которого через формирователь импульсов соединен с входом реверсивного счетчика импульсов и первым входом блока ограничения разностной частоты,
отличающаяся тем, что, с целью повышения качества регулирования , в нее введены управляемый ключ и блок сравнения кодов, первый и второй входы которого соединены соответственно с выходом сумматора и выходом интегратора, а выход с управлюящим входом ключа, информационный вход которого соединен с выходом функционального преобразователя код-частота, а выходс вторым входом блока ограничения разностной частоты.
Источники информации, принятые во внимание при экспертизе КГарнов В. К. и др. Унифицированные системы автоуправления электроприводом в металлургии. М., Ме-
таплургия,г1977 с« 98,
