Изобретение относится к системам управления двухсвязными объектами, в которых первьй входной сигнал воздействует, на сумму, а второй входной сигнал - на разность выходных координат объекта, и может быть применен в установках многозонного нагрева, многокамерных печах, в двухдвигательных электроприводах и т.д.
Целью изобретения является повышение быстродействия системы.
На фиг,1 представлена структурная схема системы; на фиг.2 - структурная схема двухсвязного объекта; на фиг.3 - графики статических харак теристик двухсвя ого объекта.
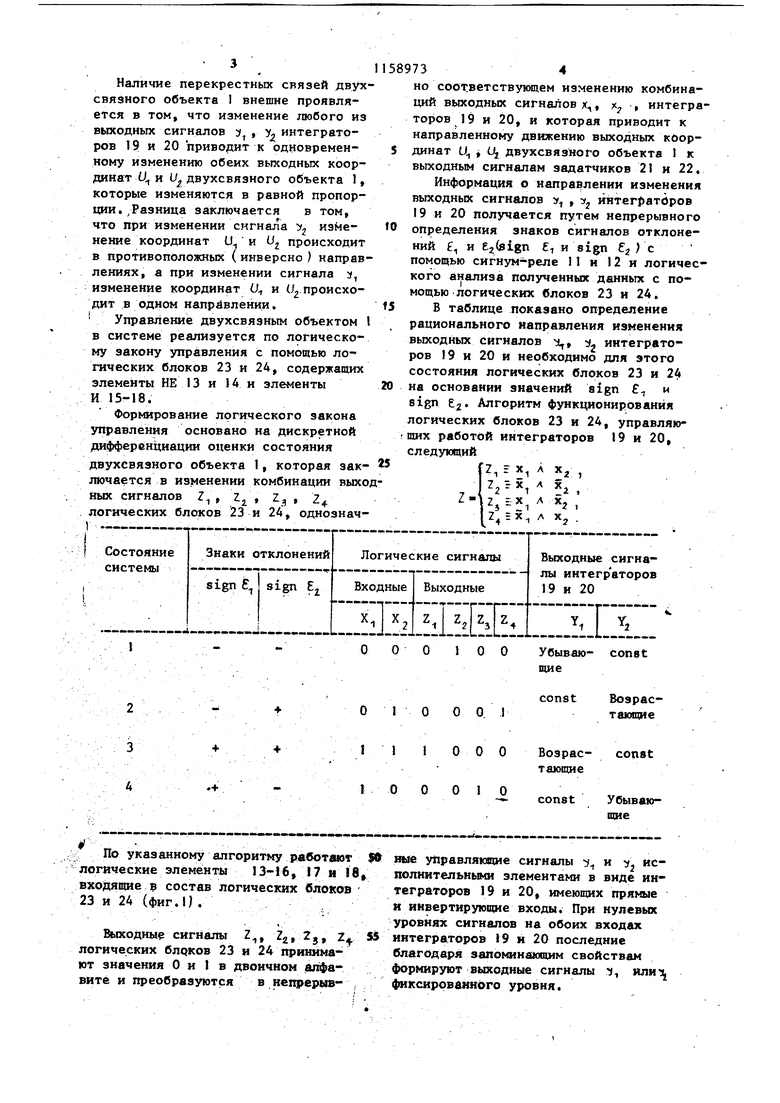
Система содержит двухсвязный объект 1, нагрузки 2 и 3, регулятор амплитуды, регулятор 5 скважности, ключи 6 и 7, элемент НЕ 8, первый 9 и второй 10 блоки сравнения, первое и второе сигнум-реле Пи 12 элементы НЕ 13 и 14, элементы И 15-18, первый и второй интеграторы 19 и 20, первый и второй задатчики 21 и 22, первый и второй логические блоки 23 и 24, Ц - среднее . значение величины первой выходной координаты двухсвязного объекта 1; Uj - среднее значение величины второй выходной координаты двухсвязного объекта 1 j /-,- выходной сигнал интегратора 19, воздействующий на сумму выходных координат U и U2; V - выходной сигнал интегратора 20, воздействующий на разность (соотношение } выходных координат И-( и 2, первый и второй входные сигналы соответственно первого и второго .логических, блоков 23 и 24; х, Xj - выходные сигналы первого и второго сигнум-реле 11 и 12; В., , Sj сигналы ошибок регулирования (отклонений ), т.е. выходные сигналы блоков 9 и 10 сравнения.
В состав первого логического блока 23 входят элементы НЕ 13, элементы И 15 и 16, В состав второго логического блока 24 входят элементы НЕ 14 и элементы И 17 и 18. В состав двухсвязного объекта 1 входят регуля торы аюшитуды и скважности 4 и 5 ключи Ь и 7, нагрузки 2 и 3, элемент НЕ В.
Система работает следующим образо«.
На первые входы блоков 9 и 0 сравнения поступают сигналы с выходов задатчиков 21 и 22, а на вторые входы - выходные координаты и и и двухсвязного объекта 1. На выходах блоков сравнений 9 и 10, формируются сигналы Е , EZ отклонений выходных координат и, , от выходных сигналов задатчиков 21 и 22. Выходные сигналы , Е блоков 9 и 10 сравнения поступают на входы сигнум-реле II и 12, на выходе которых формируются сигналы х.,, Xj, соответствующие знакам сигналов g, 3 Выходные сигналы х,, х сигнум-реле .11 и 12 поступают на входы .логических блоков 23 и 24, на первом и втором выходах которых формируются сигналы Z, Zj , Z;,, Z, которые поступают на соответствующие входы интеграторов 19 и 20. На третьем выходе первого логического блока 23 формируется выходной сигнал Ц,. , который поступает на третий вхрд логического блока 24. На третьем выходе второго логического блока 24 формируется выходной сигнал U., который поступает на третий вход логического блока 23. На выходах интеграторов 19 и 20 формируются сигналы 9, 5/. , которые поступают на входы двухсвязного объекта 1. В качестве регулятора амплитуды 4 может быть использован любой регулятор напряжения. Например, регулируемый источник питания, а регулятор скважности строится на любой из известных схем. Ключи 6 и 7 управляются от регулятора скважнос,ти 5 таким образом, что в любой момент времени включен лиш15 один из них.
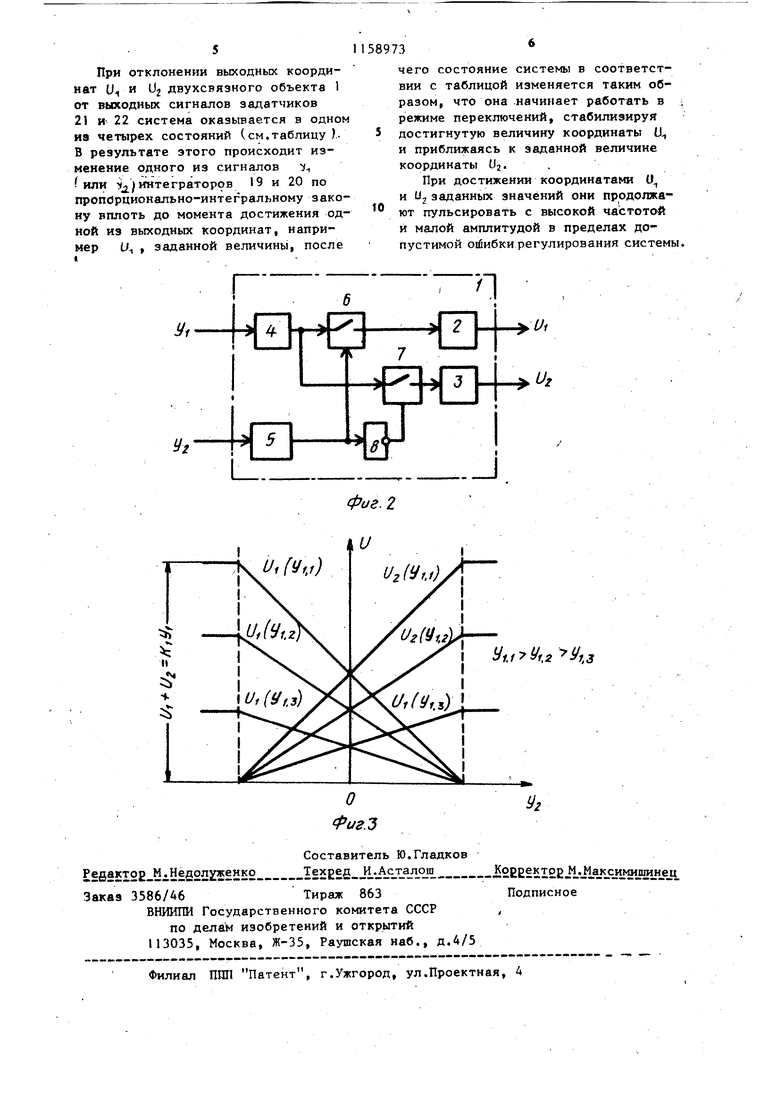
При изменении скважности (относительной длительности за период ) работы ключей 6 и 7 происходит строго пропорциональное изменение соотношения средних значений величин выходаых координат U,, U нагрузок 2 и 3 (так как среднее значение импульсной величины пропорционально ее относительной.длительности за цикл переключения ). Вид семейства статических характеристик двухсвязного объекта 1 показан на фиг.З. Специфической особенностью двухсвязных объектов такого типа является наличие естественных перекрестных связей внутри самого объекта,(фиг.1 пунктирные стрелки I.
Наличие перекрестных связей двухсвязного объекта 1 внешне проявляется в том, что изменение любого из выходных сигналов у , у, интеграторов 19 и 20 приводит к одновременному изменению обеих выходных координат Ц, и и двухсвязного объекта 1, которые изменяются в равной пропорции. Разница заключается в том, что при изменении сигнала -у изменение координат U и U происходит в противоположных (инверсно) направлениях, а при изменении сигнала э, изменение координат U и (/2 происходит в одном направлении, Управление двухсвязным объектом в системе реализуется по логическому закону управления с помощью логических блоков 23 и 24, содержащих элементы НЕ 13 и 14 и злементы И 15-18.
Формирование логического закона управления основано на дискретной дифференциации оценки состояния двухсвязного объекта 1, которая закно соответствующем изменению комбинаций выходных сигналов X,, х интеграторов 19 и 20, и которая приводит к направленному движению выходных координат U, t Чг двухсвязного объекта 1 к выходным сигналам задатчиков 21 и 22,
Информация о направлении изменения выходных сигналов , , у интеграторов 19 и 20 получается путем непрерывного определения знаков сигналов отклонений , и tjCsign EI и sign 62 с помощью сигнум-реле 11 и 12 и логического анализа полученных данных с помощью логических блоков 23 и 24.
В таблице показано определение рационального направления изменения выходных сигналов , t интеграторов 19 и 20 и необходимо для этого состояния логических блоков 23 и 24 на основании значений sign и sign 2. Алгоритм функционирования логических блоков 23 и 24, управляющих работой интеграторов 19 и 20, следующий
7, г X, л X.j ,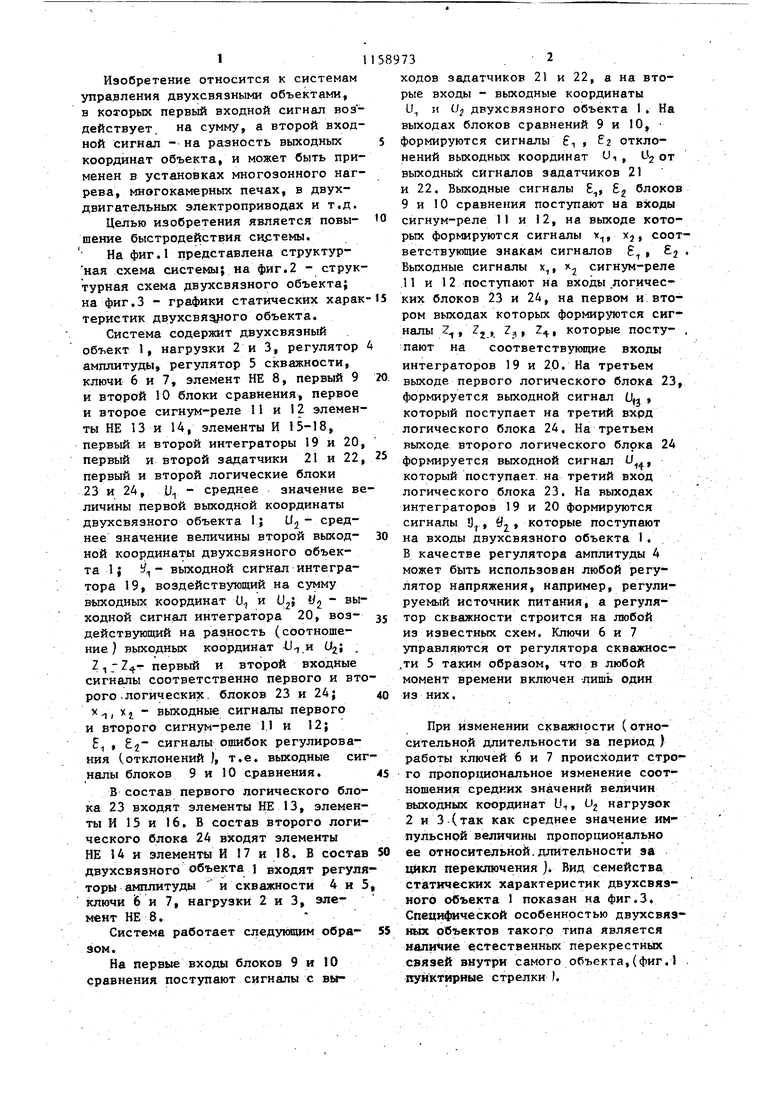
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ МНОГОМЕРНЫМ ОБЪЕКТОМ | 2003 |
|
RU2248027C2 |
| Пневматический самонастраивающийся регулятор | 1976 |
|
SU590693A1 |
| Система экстремального регулирования | 1981 |
|
SU1029140A1 |
| АДАПТИВНЫЙ РЕЛЕЙНЫЙ РЕГУЛЯТОР | 2013 |
|
RU2531865C1 |
| УСТРОЙСТВО ЭКСТРЕМАЛЬНОГО УПРАВЛЕНИЯ АСИНХРОННОГО ДВИГАТЕЛЯ | 2021 |
|
RU2766907C1 |
| АДАПТИВНЫЙ РЕЛЕЙНЫЙ РЕГУЛЯТОР | 2005 |
|
RU2284561C1 |
| Адаптивная система регулирования объекта с нестационарной характеристикой,например,дуговой сталеплавильной печи | 1983 |
|
SU1068891A1 |
| Пневматическое регулирующее устройст-BO | 1978 |
|
SU802920A1 |
| КОМАНДНЫЙ БЛОК ДЛЯ ЭКСТРЕМАЛЬНОГО РЕГУЛЯТОРА | 2011 |
|
RU2475797C1 |
| Система регулирования объекта с запаздыванием | 1986 |
|
SU1397875A1 |
СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВУХСВЯЗНЫМ ОБЪЕКТОМ, содержащая последовательно соединенные первый задатчик, первый блок сравнения, первое сигнум-реле первый логический блок и первый интегратор и последовательно соединенные второй задатчик, второй блок ШН -- S5 г... ,. ......i } , .:. п,-;.- ;,/.:. : ., .- Я Ё1а.4дет:;;:.| р ч-ч сравнения, второе сигнум-реле, второй логический блок и второй интегратор, соединенный вьпсодом с вторым входом объекта, первым входом соединенного с выходом первого интегратора, а выходами - с вторыми входами соответственно первого и второго блоков сравнения, выход первого сигнум-реле соединен с вторым входом второго логического блока, а выход второго сигнум-реле соединен с вторым входом первого логического блока, отличающаяс я тем, 4TOJ с целью повьппения быстродействия системы, в ней пторой и третий входы первого логического блока соединены соответственно с вторым входом первого интегратора и третьим входом второго логического блока, соединенного вторым и третьим выходами соответственно с вторым входом второго интегратора и третьим входом первого логического блока.
3 4 По указанному алгоритму работают логические элементы 13-16, 17 и 18 входящие 5 состав логических блоков 23 и 24 (фиг.1). Выходные сигналы Z, Z, 2j, z логических блоков 23 и 24 принимают значения О и 1 в двоичном алфавите и преобразуются в непрерыв00 100
Убываю- const щие
Возрасconst
000, 1 тающие
1 I 000 Возрас- const
тающие
o О 010
- const Убывающиеиие управлякшше сигналы -у и испслнительньа и элементами в виде интеграторов 19 и 20, имеющих прямые и инвертирующие входы. При нулевых уровнях сигналов на обоих входах интеграторов 19 и 20 последние благодаря запоминающим свойствам формируют выходные сигналы илификсированного уровня.
| Воронов А.А | |||
| Основы теории автоматического регулирования | |||
| М.Л | |||
| Энергия, 1970, ч.П1, с.212-222, / рис.8.2 | |||
| Способ-инверсного регулирования напряжения на двух нагрузках | 1975 |
|
SU535713A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Система автоматического управления двусвязным объектом | 1981 |
|
SU1010596A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
