Изобретение относится к области синтеза многомерных систем автоматического управления (МСАУ).
Известна двухканальная система регулирования, которая содержит датчики и задатчики первого и второго параметров, регуляторы первого и второго каналов, три сумматора, два исполнительных органа и дополнительно снабжена тремя ограничителями сигналов, сумматором и блоком умножения. Датчик и задатчик первого параметра соединены с регулятором первого канала. Выход регулятора первого канала соединен с тремя ограничителями. Каждый ограничитель соединен с сумматором, а затем первый сумматор соединен с блоком умножения, второй и третий - с дополнительным сумматором, который соедин с задатчиком второго параметра. Дополнительный сумматор и второй датчик соединены с регулятором второго канала, а выход регулятора второго канала - со вторым исполнительным органом, при этом блок умножения соединен с первым исполнительным органом (патент РФ № 1833833, кл. G 05 В 11/32, опубл. 15.08.93 г.).
Недостатками являются сложность регуляторов и недостаточное качество регулирования.
Наиболее близкой к предлагаемой является система автоматического управления многомерным объектом, содержащая два канала. Каждый канал состоит из последовательно соединенных задатчика, блока сравнения, сигнум-реле, логического блока и интегратора. Выходы интеграторов соединены с входами объекта управления, а выходы объекта управления соединены с блоками сравнения. Каждый блок сравнения соединен с задатчиком. Выход каждого сигнум-реле соединен с обоими логическими блоками. Для повышения быстродействия системы логические блоки соединены между собой. В описываемой системе управления двухсвязным объектом первый входной сигнал воздействует на сумму, а второй - на разность выходных координат объекта (патент РФ № 1158973, кл. G 05 В 11/32, опубл. 30.05.85 г.).
Недостатками рассмотренных систем управления являются сложность регуляторов и недостаточное качество регулирования.
Предложенное изобретение направлено на улучшение качества регулирования в многомерных системах управления за счет добавления в каналы управления обратных связей, содержащих дополнительные регуляторы, и ввода перекрестных обратных связей между подсистемами, содержащих динамические регуляторы.
Поставленная задача достигается тем, что система автоматического управления многомерным объектом содержит последовательно соединенные первый задатчик, первый блок сравнения и регулятор первого канала и последовательно соединенные второй задатчик, второй блок сравнения и регулятор второго канала, выходы регуляторов первого и второго каналов соединены с входами двухсвязного объекта управления, в отличие от прототипа в нее введены первый, второй, третий, четвертый регуляторы, при этом первый выход двухсвязного объекта управления параллельно соединен с первым и вторым регуляторами, при этом выход первого регулятора соединен с третьим входом второго блока сравнения, а выход второго регулятора соединен со вторым входом первого блока сравнения, второй выход двусвязного объекта управления параллельно соединен с третьим и четвертым регуляторами, при этом выход третьего регулятора соединен со вторым входом второго блока сравнения, а выход четвертого регулятора соединен с третьим входом первого блока сравнения.
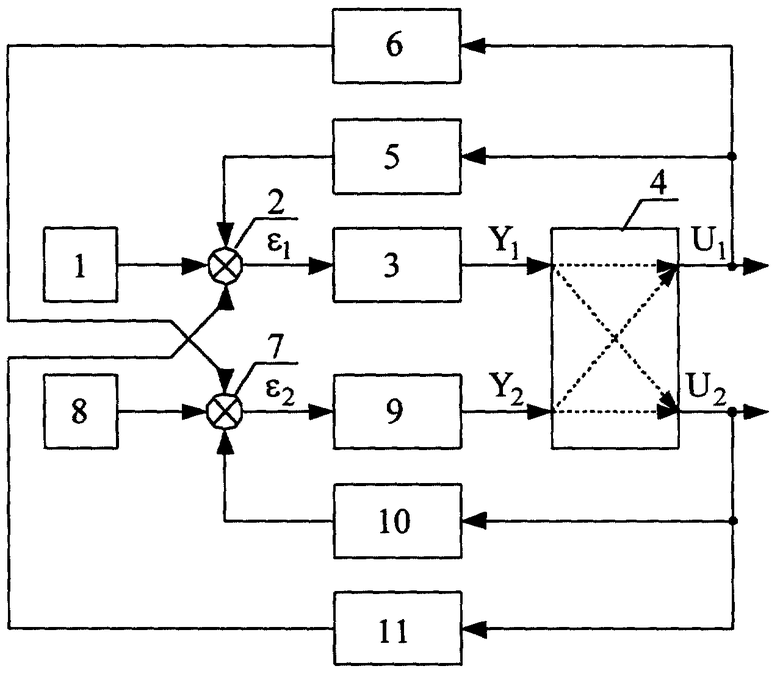
Существо изобретения поясняется чертежом, где показана двумерная система автоматического регулирования.
Система автоматического регулирования состоит из первого задатчика 1, соединенного с первым блоком сравнения 2, который соединен с регулятором первого канала 3, соединенного с двухсвязным объектом управления 4. Первый выход двухсвязного объекта управления 4 параллельно соединен с регуляторами 5 и 6. Выход регулятора 5 соединен с первым блоком сравнения 2, а выход регулятора 6 соединен со вторым блоком сравнения 7. Второй задатчик 8 соединен со вторым блоком сравнения 7, который соединен с регулятором второго канала 9, соединенного с двухсвязным объектом управления 4. Второй выход двухсвязного объекта управления 4 параллельно соединен с регуляторами 10 и 11. Выход регулятора 11 соединен с первым блоком сравнения 2, а выход регулятора 10 соединен со вторым блоком сравнения 7. Таким образом, через регуляторы 6, 11 первый и второй каналы связываются между собой. U1 - среднее значение величины первой выходной координаты двухсвязного объекта 1; U2 - среднее значение величины второй выходной координаты двусвязного объекта 1; ε1, ε2- сигналы ошибок регулирования (отклонений), Y1, Y2 - значения регулируемых величин.
Система работает следующим образом.
На первые входы блоков сравнения 2 и 7 поступают сигналы с выходов задатчиков 1 и 2, на вторые и третьи входы - выходные координаты U1 и U2 двухсвязного объекта 4, проходящие через регуляторы собственного 5, 10 и соседнего каналов связи 6, 11. На выходах блоков сравнений 2 и 7 формируются сигналы ε1, ε2 отклонений выходных координат U1, U2 объекта управления от выходных сигналов задатчиков 1 и 8. Выходные сигналы отклонений ε1, ε2 блоков сравнения 2 и 7 поступают на входы несвязных регуляторов каналов 3 и 9. Две независимо регулируемые величины Y1 и Y2 с выходов регуляторов 3, 9 подаются на вход объекта управления 4. С выхода объекта управления сигнал U1 поступает на элемент сравнения первого канала 2 через регулятор первого канала 5 и на элемент сравнения второго канала 7 через регулятор первого канала 6, а сигнал U2 поступает на элемент сравнения второго канала 8 через регулятор второго канала 10 и на элемент сравнения первого канала 2 через регулятор второго канала 11, то есть второй вход первого блока сравнения 2 соединен с выходом второго регулятора 5, а второй вход второго блока сравнения 7 - с выходом третьего регулятора 10 и третий вход первого блока сравнения 2 соединен с выходом четвертого регулятора 11, а третий вход второго блока сравнения 7 - с выходом первого регулятора 6.
Введенные в систему управления регуляторы 5, 6, 10, 11 позволяют повысить качество процесса регулирования.
Таким образом, предложенное изобретение позволяет избавиться от недостатков существующих методов синтеза МСАУ и достичь в системе наилучшего качества процесса управления.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ и система автоматического управления | 2016 |
|
RU2624136C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2006 |
|
RU2332580C1 |
| СПОСОБ И СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ | 2014 |
|
RU2571570C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ ПО КРЕНУ И ТАНГАЖУ | 2006 |
|
RU2302030C1 |
| Система автоматического управления двухсвязным объектом | 1983 |
|
SU1158973A1 |
| СИСТЕМА РЕГУЛИРОВАНИЯ ОБЪЕКТА С РЕЦИКЛОМ | 2013 |
|
RU2562362C2 |
| СПОСОБ УПРАВЛЕНИЯ СКОРОСТЬЮ ВЗАИМОСВЯЗАННЫХ ПРИВОДОВ | 1989 |
|
RU2025036C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2010 |
|
RU2446298C1 |
| РЕГУЛЯТОР | 1990 |
|
RU2015520C1 |
| КАСКАДНАЯ ДВУХКАНАЛЬНАЯ САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА КОМБИНИРОВАННОГО УПРАВЛЕНИЯ | 2006 |
|
RU2327196C1 |
Изобретение относится к области синтеза многомерных систем автоматического управления техническими объектами. Техническим результатом является повышение качества регулирования. Устройство содержит задатчики, регуляторы, блоки сравнения, двухсвязный объект управления. 1 ил.
Система автоматического управления многомерным объектом, содержащая последовательно соединенные первый задатчик, первый блок сравнения и регулятор первого канала и последовательно соединенные второй задатчик, второй блок сравнения и регулятор второго канала, выходы регуляторов первого и второго каналов соединены с входами двухсвязного объекта управления, отличающаяся тем, что в нее введены первый, второй, третий, четвертый регуляторы, при этом первый выход двухсвязного объекта управления параллельно соединен с первым и вторым регуляторами, при этом выход первого регулятора соединен с третьим входом второго блока сравнения, а выход второго регулятора соединен со вторым входом первого блока сравнения, второй выход двухсвязного объекта управления параллельно соединен с третьим и четвертым регуляторами, при этом выход третьего регулятора соединен со вторым входом второго блока сравнения, а выход четвертого регулятора соединен с третьим входом первого блока сравнения.
| Система автоматического управления двухсвязным объектом | 1983 |
|
SU1158973A1 |
| СПОСОБ УПРАВЛЕНИЯ ПАРАМЕТРАМИ ОБЪЕКТА И СИСТЕМА УПРАВЛЕНИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 1999 |
|
RU2173870C1 |
| РЕГУЛЯТОР | 1990 |
|
RU2020533C1 |
| Двухканальная система регулирования | 1991 |
|
SU1833833A1 |
| Система автоматического управления двусвязным объектом | 1981 |
|
SU1010596A1 |
| ЕР 0372899 A1, 13.06.1990. | |||

