Изобретение относится к автоматическому управлению и может быть ис-i пользовано для управления электроприводами, регулируемыми по току, скорости и положению, с повышенными Требованиями к точности, быстродействию и стабильности динамических характеристик, в которых в процессе работы имеет место изменение пара-г .метров, в частности электромеханической постоянной времени: в станкостроении, в системах автоматического управления приводами металлорежущих станков, в роботостроении в системах автоматического управления приводами рабочих органов манипуляционных роботов и др.
Известен самонастраивающийся регулятор, состоящий из последовательно соединенных задатчика, эталонной модели, измерителя ошибки, блока дифференцирования, усилителя с ограничением и сумматора, второй вход которого соединен с выходом задатчика, а выход - с входом управляемого объекта, выход которогоподключен к в-торому входу измерителя ошибки 11.
Недостатком такого регулятора является наличие блока дифференцирования, реализация которого предусматридает получение производных выходной координаты управляемого объекта вплоть до (п-1)-й, где п порядок объекта. ПриИспользовании реальных дифференциаторов такой регулятор может стать неработоспособным, во-первых, из-за- влияния собственной динамики дифференциа10торов на устойчивость адаптивных процессов, во-вторых, ввиду присутствия измерительных шумов в выходной координате.
15
Наиболее близким техническим решением к изобретений является микросхемное устройство для управления электроприводом, содержащее первый интегратор, первый сумматор, второй
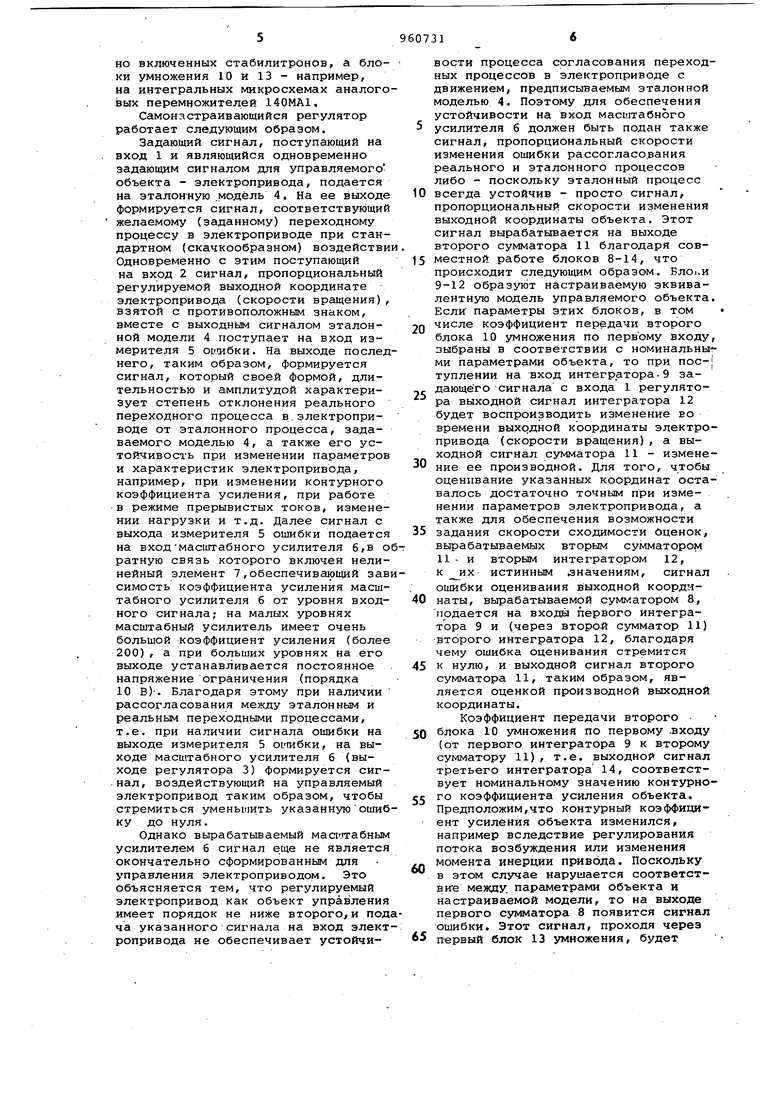
20 сумматор и последовательно соединенные эталонную модель, измеритель ошибки, масштабный усилитель и нелинейный элемент, второй и третий входы масштабного усилителя под25ключены соответственно к выходу нелинейного элемента и второго сумматора, выход первого сумматора соединен с первым входом первого интегратора, а первый вход - со вторым входом измерителя ошибки 2. Недостатком данного устройства является ограниченный диапазон изме нения параметров управляемого объек та (примерно 10-кратный), при котором гарантируется работоспособность этого устройства. Это объясняется тем, что при большей кратности изменения параметров, что характерно главным образом для .контурного коэффициента усиления объекта, оценивание производной измеряемой коор данаты, обеспечиваемое совместной работой первого и второго сумматоров и интегратора, становится слишком неточньлм, что препятствует нормальному функционированию устройств Цель изобретения - расширение области применения данного устройст ва путем обеспечения его работоспособности в условиях, когда контурны коэффициент усиления управляемого объекта изменяется в широком диапазоне (в десятки раз), Такого рода нестационарность характерна, вчаст ности, для систем управления электр приводов с глубоким регулированием возбуждения двигателя и переменным моментом инерции, например электроприводов прокатных станов и главных приводов металлорежущих станков. Так, при 10-кратном изменении поток возбуждения в 3-5-кратном изменении приведенного момента инерции (напри мер за счет переключения передаточного числа редуктора) привода главного движения станка электромехани ческая постоянная времени и общий коэффициент усиления контура регулирования скорости вращения изменяются в 30-50 раз. Указанная цель достигается тем, что регулятор содержит второй интег ратор и последовательно соединенные первый блок умножения, третий интег ратор, второй блок умнохсения, выход которого через последовательно соединенные второй сумматор и второ интегратор подключен ко второму вхо ду первого сумматора и второму вход первого интегратора, первый вход которого соединен с первым входом первого блока умножения и со вторым входом второго сумматора, выход со вторыми входами первого и второго блоков умножения и с третьим своим входом, четвертый вход - со входом эталонной модели. Введенные блоки обеспечивают сохранение точности оценки производ ной измеряемой координаты при глубоком изменении контурного коэффициента усиления управляемого объекта и тем самым сохранение в указанных условиях работоспособности всего устройства в целом. Первый интегратор, второй блок умножения, второй сумматор и второй интегратор вместе с соответствующими связями в совокупности образуют настраиваемую модель управляемого объекта (возможность эквивалентного представления системой второго порядка, характерна для многих систем, в частности для унифицированных электроприводов с подчиненным регулированием переменных). При изменении контурного коэффициента усиления объекта первый блок умножения и третий интегратор осуществляют автоматическую настройку коэффициента передачи второго блока умножения, для чего используется вырабатываемый первым сумматором сигнал рассогласования между измеренным значением выходной координаты объекта и ее оценкой. Благодаря такой автоматической настройке и сохраняется точность оценки производной, сигнал по которой формируется на выходе второго сумматора. На чертеже изображена структурная схема предлагаемого самонастраивающегося регулятора. Предлагаемый самонастраивающийся регулятор, имеющий входы 1 и 2 и выход 3, содержит последовательно соединенные эталонную модель- 4, вход которой подключен ко входу 1, измеритель 5 ошибки, второй вход которого соединен со входом 2, масштабный усилитель б, выход которого подключен к выходу 3, и нелинейный элемент 7, выход которого соединен со вторым входом масштабного усилителя 6. Далее регулятор содержит последовательно соединенные первый сумматор 8, вход которого подключен ко входу 2, первый интегратор 9, второй вход которого соединен со входом 1, второй блок 10 умножения, второй сумматор 11, второй вход которого присоединен к выходу сумматора 8, а выход - к третьему входу масштабного усилителя б, и второго интё:гратора 12, выход которого подключен ко второму входу первого сумматора 8 и третьему входу первого интегратора 9, четвертый вход которого соединен с его выходом, а также; последовательно соединенные первый блок 13 умножения, входы которого подключены к выходам соответственно .первого сумматора 8 и первого интегратора 9, и третий интегратор 14, выход которого подключен ко второму входу второго блока 10 умножения. Эталонная модель 4 может быть реализована, например,, в виде пассивного НС-фильтра, измеритель 5 ошибки, масштабный усилитель 6, сумматоры 8 и 11 и интеграторы 9, 12 и 14 - на операционных усилителях, например, на интегральных : микросхемах типа К553УД1В, нелинейный элемент 7-6 виде двух встречно включенных стабилитронов, а блоки умножения 10 и 13 - например, на интегральных микросхемах аналоговых перемножителей 140МА1,
Самонастраивающийся регулятор работает следующим образом.
Задающий сигнал, поступающий на вход 1 и являющийся одновременно задающим сигналом для управляемого объекта - электропривода, подается на эталонную .модель 4. На ее выходе формируется сигнал, соответствующий желаемому (заданному) переходному процессу в электроприводе при стандартном (скачкообразном) воздействи Одновременно с этим поступающий на вход 2 сигнал, пропорциональный регулируемой выходной координате электропривода (скорости вращения), взятой с противоположным знаком, вместе с выходным сигналом эталонной модели 4 поступает на вход измерителя 5 огтшбки. На выходе последнего, таким образом, формируется сигнал, который своей формой, длительностью и амплитудой характеризует степень отклонения реального переходного процесса в.электроприводе от эталонного процесса, задаваемого моделью 4, а также его устойчивость при изменении параметров и характеристик электропривода, например, при изменении контурного коэффициента усиления, при работе в режиме прерывистых токов, изменении нагрузки и т.д. Далее сигнал с выхода измерителя 5 ошибки подается на входмасштабного усилителя б,в о ратную связь которого включен нелинейный элемент 7,обеспечивающий завсимость коэффициента усиления масштабного усилителя 6 от уровня входного сигнала; на малых уровнях масштабный усилитель имеет очень большой коэффициент усиления (более 200), а при больших уровнях на его выходе устанавливается постоянное напряжение ограничения (порядка 10 В)-. Благодаря этому при наличии рассогласования между эталонным и реальным переходными процессами, т.е. при наличии сигнала ошибки на выходе измерителя 5 О1шбки, на выходе масштабного усилителя 6 (выходе регулятора 3) формируется сигнал, воздействующий на управляемый электропривод таким образом, чтобы стремиться уменьшить указаннуюошибку до нуля.
Однако вырабатываемый масг.пгабным усилителем 6 сигнал еще не является окончательно сформированным для управления электроприводом. Это объясняется тем, что регулируемый электропривод как объект управления имеет порядок не ниже второго,и подча указанного сигнала на вход элект ропривода не обеспечивает устойчивости процесса согласования переходных процессов в электроприводе с движением, предписываемым эталонной моделью 4. Поэтому для обеспечения устойчивости на вход масштабного 5 усилителя 6 должен быть подан также сигнал, пропорциональный скорости изменения ошибки рассогласования реального и эталонного процессов либо - поскольку эталонный процесс
0 всегда устойчив - просто сигнал, пропорциональный скорости изменения выходной координаты объекта. Этот сигнал вырабатывается на выходе второго сумматора 11 благодаря совместной работе блоков 8-14, что
происходит следующим образом. Бло1чИ 9-12 образуют настраиваемую эквивалентную модель управляемого объекта. Если параметры этих блоков, в том
0 числе коэффициент передачи второго блока 10 умножения по первому входу, зыбраны в соответствии с номинальны ми параметрами объекта, то при поступлении на вход интегратора9 задающего Сигнала с входа 1 регулятора выходной сигнал интегратора 12 будет воспроизводить изменение во времени выходной координаты электропривода (скорости вращения), а выходной сигнал сумматора 11 - изменение ее производной. Для того, чтобы оценивание указанных координат оставалось достаточно точным при изменении параметров электропривода, а также для обеспечения возможности
5 задания скорости сходимости Оценок, вырабатываемых вторым сумматором 11 - и вторым интегратором 12, к их истинным значениям, сигнал ошибки оценивания выходной коордм0 наты, вырабатываемой сумматором 8, подается на входы первого интегратора 9 и (через второй сумматор 11) второго интегратора 12, благодаря чему ошибка оценивания стремится
5 к нулю, и выходной сигнал второго сумматора И, таким образом, является оценкой производной выходной координаты.
Коэффициент передачи второго
0 блока ГО умножения по первому .входу (от первого интегратора 9 к второму сумматору 11), т.е. выходной сигнал третьего интегратора 14, соответствует номинальному значению контурного коэффициента усиления объекта. Предположим,что контурный коэффициент усиления объекта изменился, например вследствие регулирования потока возбуждения или изменения момента инерции привода. Поскольку
0 в этом случае нарушается соответствие между, параметрами объекта и настраиваемой модели, то на выходе первого сумматора 8 появится сигнал ошибки. Этот сигнал, проходя через
5 п-ервый блок 13 умножения, будет
| название | год | авторы | номер документа |
|---|---|---|---|
| Самонастраивающаяся система управления | 1980 |
|
SU962852A2 |
| Самонастраивающаяся система управления | 1979 |
|
SU845143A1 |
| Самонастраивающаяся система управления | 1983 |
|
SU1158974A1 |
| Самонастраивающаяся система управления | 1982 |
|
SU1071997A1 |
| Самонастраивающаяся система управления | 1979 |
|
SU851339A1 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1990 |
|
RU2011286C1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД | 1994 |
|
RU2060530C1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД | 2015 |
|
RU2592036C1 |
| Самонастраивающаяся система управления | 1985 |
|
SU1249478A1 |
| Система управления | 1978 |
|
SU697974A1 |
