Изобретение относится к автомати ческому управлению и может быть использовано для управления электроприводами .
По основному авт. св. 845143 известна самонастраивающаяся система управления, содержащая последовательно соединенные задатчик, первый сумматор, регулятор, усилитель мощности и электродвигатель с установленными на нем датчиком регулируемой координаты и датчиком тока, выход которого через последовательно соединенные второй сумматор, первый блок умножения, третий сумматор, первый интегратор, четвертый сумматор, второй блок умножения и второй интегратор подключен к управляющему входу регулятора и второму входу первого блока умножения, и последовательно соединенные третий интегратор, пятый сумматор и блок деления, второй вход которого подключен к выходу второго интегратора, выход - к второму входу второго сумматора, выход которого соединен с вторым входом второго блока умножения. Выход датчика регулируемой координаты соединен с вторыми входами первого, четвертого и пятого сумматоров, вход третьего
интегратора соединен с первым входом третьего сумматора, второй вход которого подключен к выходу четвертого сумматора 1.
Недостатком данной самонастраивающейся системы управления является неполная компенсация коэффициента передачи электродвигателя и ограничение скорости Самонастройки из-за
10 инерционности элементов адаптивного механизма, что снижает точность и быстродействие системы. Кроме того, основной контур регулирования не обладает инвариантностью к действию
15 внешних возмущений, что приводит к невозможности обеспечить в ширбком диапазоне высокую точность стабилизации регулируемой координаты.
Цель изобретения - повышение точ20ности и быстродействия самонастраивающейся систе управления.
Указанная цель достигается тем, что известной самонастраивающейся системе управления дополнительно
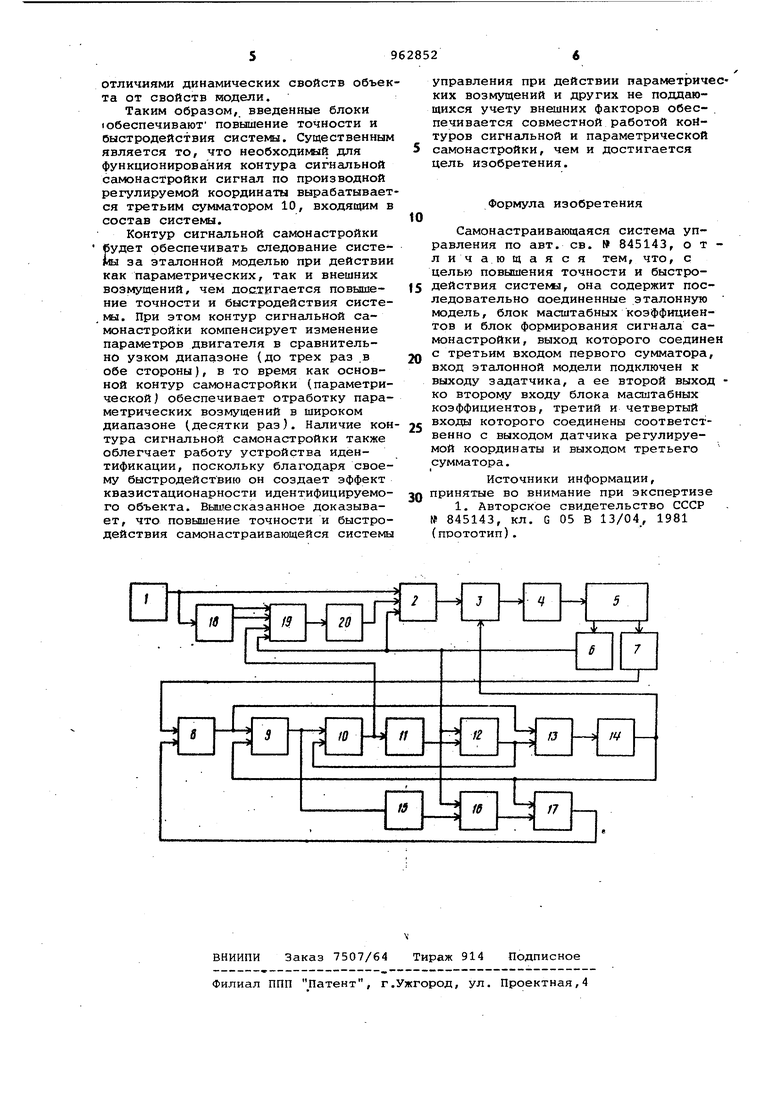
25 установлены последовательно соединенные эталонная модель, блок масштабных коэффициентов и блок формирования сигнала самонастройки, выход которого соединен с третьим вхо30дом первого cyiviMaTopa, вход эталонной модели подключен к выходу задатчика, а ее второй выход - к второму входу блока масштабных коэффициентов, третий и четвертый входы которого соединены соответственно с вы ходом датчика регулируемой координаты и выходом третьего сумматора. i На чертеже представлена блок-схема самонастраивающейся системы управления.
Схема содержит эадатчик 1, первый сумматор 2/регулятор 3, усилитель 4 мощности, электродвигатель 5, с установленными на нем датчиком 6 регулируемой координаты и датчиком 7 тока, второй сумматор 8, первый блок 9 умножения, третий сумматор 10, первый интегратор 11, четвертый суммтор 12, второй блок 13 умножения/ второй интегратор 14, третий интегратор 15, пятый сумматор 16, блок 17 деления, эталонная модель 18, блок
19масштабных коэффициентов и блок
20формирования сигнала самонастройки.
Система при этом приобретает следующую структуру. Основной контур регулирования образован блоками 1-6. Блоки 7-17 образуют устройство идентификации коэффициентапередачи ток - скорость электродвигателя, Оценка этого коэффициента, вырабатываемая вторым интегратором 14, подается на управляющий вход регу/rkTopa 3, перестраивая его коэффициент усиления 1паоаметоическая самонастройка). Блоки 18-20 обеспечивают сигнальную самонастройку системы.
Работа самонастраивающейся системы управления (например, скоростью вращения электродвигателя с переменным моментом инерции и регулируемым потоком возбуждения) происходит следующим образом.
Если коэффициент передачи двигателя изменился, например уменьшился вследствие уменьшения потока воз-буждения или увеличения приведенного момента инерции, то во время переходного процесса, вызванного, например, увеличением выходного сигнала задатчика 1, выходной сигнал датчика 7 тока, проходя через сумматор 8, первый блок Э умножения, третий сумм тор 10, первый интегратор 11, четвертый сумматор 12 и второй блок 13 умно||(ения, вызовет уменьшение выходного сигнала второго интегратора 14 до значения , соответствующего коэффициенту передачи двигателя, так как только в этом случае выходной сигнал четвертого сумматора 12 станет равным нулю. Вследствие этого за счет воздействия на управляющий вход регулятора 3 его коэффициент . усиления увеличится, компенсируя уменьшение: коэффициента передачи двигателя. Точная идентификация коэф
фициента передачи происходит благодаря тому, что на входе настраиваемой модели двигателя, образованной первым блоком 9 умножения и первым интегратором 11, формируется сигнал, пропорциональный динамическому току. С этой целью третий интегрь тор 15, пятый сумматор 16 и блок 17 )5еления совместно с вторым сумматором 8 и первым блоком 9 умножения ос ществляют идентификацию составляющей тока, соответствующей моменту нагсузки. Например., при увеличении нагрузки выходной сигнал второго сумматора 8 перестанет соответствовать новому значению динамического тока, вследствие чего через первый блок 9 умножения, третий интегратор 15 и пятый сумматор 16 он вызовет увеличение выходного сигнала блока 17 деления до значения соответствующего увеличивающемуся моменту нагрузки.
Ввиду инерционности контура параметрической самонастройки он вступает в действие не сразу. Напротив, контур сигнальной самонастройки начинает немедленно ликвидировать ошибку между скоростью двигателя и выходом эталонной модели 18, обусловленную как параметрическими изменениями, так и действием любых не поддающихся учету внешних возмущений, Блок 19 масштабных коэффициентов формирует сигналы ошибок по регулируемой координате и ее производной для чего соответственно из сигнала с первого выхода эталонной модели 18 вычитается выходной сигнал датчика регулируемой координаты 6 и из сигнала с,второго выхода эталонной модели 18 вычитается сигнал с входа первого интегратора 11. Сигналы разности усиливаются со своими коэффициентами, а затем суммируются, исходной сигнал с блока 19 подается на вход блока 20 формирования сигнал самонастройки. Этот блок, реализующий знаковую функцию, вырабатывает сигнал самонастройки, воздействующий на третий вход первого сумматора 2.
Следует отметить, что введенные блоки, образующие параллельный контур сигнальной самонастройки, обеспечивает согласование динамики: системы с динамикой эталонной модели путем подачи на вход первого сум-матора дополнительного сигнала са--монастройки. Эталонная модель настраивается исходя из желаемого вида реакции системы на управление. Сис. тема будет ликвидировать любые отклонения регулируемой координаты от движения, предписываемого моделью, вне зависимости от того, какими причинами эти отклонения вызваны: действием внешних возмущений, изменением параметров объекта или исходными
отличиями динамических свойств объекта от свойств модели.
Таким образом, введенные блоки (Обеспечивают повышение точности и быстродействия системы. Существенным является то, что необходимый для функционирования контура сигнальной самонастройки сигнал по производной регулируемой координаты вырабатывается третьим сумматором 10, входящим в состав системы.
Контур сигнальной самонастройки будет обеспечивать следование системы за эталонной моделью при действии как параметрических, так и внешних возмущений, чем достигается повышение точности и быстродействия системы. При этом контур сигнальной самонастройки компенсирует изменение параметров двигателя в сравнительно узком диапазоне (до трех раз .в обе стороны), в то время как основной контур самонастройки (параметрической ) обеспечивает отработку параметрических возмущений в широком диапазоне (десятки раз). Наличие контура сигнальной самонастройки также облегчает работу устройства идентификации, поскольку благодаря своему быстродействию он создает эффект квазистационарности идентифицируемого объекта. Вышесказанное доказывает, что повышение точности и быстродействия самонастраивающейся системы
управления при действии параметрических возмущений и других не поддающихся учету внешних факторов обеспечивается совместной работой койтуров сигнальной и параметрической самонастройки, чем и достигается цель изобретения.
Формула изобретения
10
Самонастраивающаяся система управления по авт. св. 845143, отличающаяся тем, что, с целью повышения точности и быстродействия система, она содержит последовательно соединенные эталонную модель, блок масштабных коэффициентов и блок формирования сигнала самонастройки, выход которого соединен с третьим входом первого сумматора,
0 вход эталонной модели подключен к выходу задатчика, а ее второй выход ко второму входу блока масштабных коэффициентов, третий и четвертый входы которого соединены соответст5венно с выходом датчика регулируемой координаты и выходом третьего сумматора.
Источники информации,
Q принятые во внимание при экспертизе
1. Авторское свидетельство СССР № 845143, кл. G 05 В 13/04, 1981 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Самонастраивающаяся система управления | 1983 |
|
SU1158974A1 |
| Самонастраивающаяся система управления | 1985 |
|
SU1249478A1 |
| Самонастраивающаяся система управления | 1979 |
|
SU845143A1 |
| Самонастраивающаяся система управления | 1982 |
|
SU1071997A1 |
| Самонастраивающийся регулятор | 1981 |
|
SU960731A1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2013 |
|
RU2541848C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СЛЕДЯЩАЯ СИСТЕМА | 1996 |
|
RU2111521C1 |
| Устройство для управления электроприводом | 1982 |
|
SU1061105A1 |
| Самонастраивающаяся система управления | 1981 |
|
SU1008698A1 |
| САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ | 2016 |
|
RU2616219C1 |
