Изобретение относится к автоматическому управлению и может быть использовано в автоматизированных электроприводах с повышенными требованиями к точности и качеству регулирования, например в следящих электроприводах подач металлорежущих станков.
Цель изобретения - увеличение точности регулирования и расширение области применения устройства.
На чертеже изображена структурная схема самонастраивающейся системы управления.
Система содержит регулятор 1, эта лонную модель 2, первый элемент сравнения 3, первый усилитель-преобразователь 4, сумматор 5, второй элемент сравнения 6, второй усилитель- преобразователь 7, третий элемент сравнения 8, интегратор 9, объект управления 10, датчик тока 11, датчик скорости 12, датчик положения 13
Эталонная модель 2 функционирует в соответствии с уравнением ka / k(
)
где
т,р+1 С т;|- з р)-(р)).
X р выход модели;
оценка производной регулируемой координаты; выход регулятора; оператор Лапласа.
Система работает следующим образом .
Задающий сигнал Х поступает на первый вход регулятора 1. Управляющее воздействие Хц, вырабатьшаемое регулятором, поступает на первый вход эталонной модели 2 и через сумматор 5 на вход объекта управления 10.
На выходе эталонной модели формируется сигнал, соответствующий желаемому переходному процессу изменения тока якорной цепи двигателя. Сигнал с выхода эталонной модели поступает на первый вход первого элемента сравнения 3, на второй вход которого поступает сиграл с выхода датчика тока 11 якорной цепи электродвигателя . При отклонении реального процесса изменений тока от желаемого, например, вследствие нелинейности ти- ристорного преобразователя (усилителя мощности объекта управления) или работы электродвигателя в режиме прерывистых токов на выходе первого элемента сравнения 3 формирует
ся сигнал ошибки, который через первый усилитель-преобразователь 4 и сумматор 5 воздействует на вход объекта управления, уменьшая указанной отклонение по принципу сигнальной самонастройки.
Эталонная модель 2, первый элемент сравнения 3, первый усилитель- преобразователь 4, элемент сравнения 5 с соответствующими связями образуют первый контур самонастройки, обеспечивающий желаемьй закон изменения тока в якорной цепи электродвигателя.
25
Первый усилитель-преобразователь 4 имеет передаточную функцию пропорционально-интегрирующего звена и необходим для устранения статичес20 кой ошибки на выходе первого элемента сравнения 3, а также для увеличения быстродействия первого контура самонастройки. Связь между вторым входом эталонной модели 2 и выходом интегратора 9 позволяет учесть действие электродвижущей силы в якорной цепи электродвигателя.
Интегратор 9, второй элемент сравнения 6, второй усилитель-пре-30 образов атель 7, третий элемент сравнения 8 с соответствующими связями образуют второй контур самонастройки, который на основе информации о токе и скорости объекта управления
35 позволяет получить информацию о статической нагрузке и второй производной выходной координаты объекта управления (ускорении привода). Алго- -ритмы работы второго контура само40 настройки можно описать уравнениями
(pi;
м-к+м
Ч
или
5
при Ф
А-- СФ1 -Ни
I
const, С(К KJ-MH
х
;
(1) (2)
(3) (4)
где X - выходная координата объекта
управления;
i - ток якорной цепи электродвигателя;
С - коэффициент пропорциональ- ности;
М - движущий момент объекта управления;
Mj - момент нагрузки объекта управления;
I - суммарный момент инерции объ
екта управления; 9- поток возбуждения двигателя
Операция вычисления (К;-М) во втором контуре самонастройки выполня ется с помощью третьего элемента сравнения 8. Сигнал на его выходе пропорционален второй производной выходной координаты объекта управления. Сигнал с выхода интегратора 9, пропорциональный первой производной выходной координаты, сравнивается с помощью второго элемента сравнения 6 с фактическим значением скорости объекта управления Ю. Действие нагрузки Мц на объект управления приводит к появлению на выходе второго элемента сравнен я 6 сигнала ошибки который через второй усилитель-преобразователь 7 поступает на первый вход третьего элемента сравнения 8 и восстанавливает соответствие между скоростью объекта управления и ее оценкой на выходе интегратора. Поскольку значение тока в якорной цепи электродвигателя задано с помощью контура самонастройки, то действие нагрузки влияет только на скорость объекта управления. Следовательно, сигнал на выходе второго усилителя преобразователя 7 пропорционален моменту нагрузки М.
Информация о токе во второй контур самонастройки поступает с выхода эталонной модели 2, что устраняет вредное влияние на его,работу измерительных шумов, присутствующих в выэ4одном сигнале датчика тока. Источником шумов являются пульсации тока, вызванные ограниченным числом фаз питающего напряжения, работой привода в режиме прерывистых токов или неблагоприятными режимами коммутации в коллекторном узле электродви гатвля. Второй контур самонастройки имеет первый порядок, а следовательно, высокое быстродействие и позволяет обеспечить высокую точность оценок первой и второй производной выходной координаты объекта управления. Второй усилитель-преобразователь 7 имеет те же функции и схемную реализацию как и первый усилитель-преобразователь 4.
В регулятор 1 системы управления поступает информация о положении, скорости, ускорении и статической нагрузке объекта управления. На ос902554
нове этих данных регулятор формирует управляющее воздействие.
Передаточная функция регулятора с учетом обратных связей по положению, скорости и ускорению имеет вид W(p)(Y,p4(Y,j+Y,Y, )p + (Y,Yj+Y,Y,Y),x .p+Y,Y,Y,),(7)
где Y, - коэффициент передачи диф- 10ференцирующего звена регулятора;
Y ,- ,Y,-коэффициенты передачи позиционных звеньев регулятора.
15 В свою очередь характеристический полином объекта управления (для случая когда объект управления представляет собой электродвигатель постоянного тока с тиристорным преобра- 0 зователем) имеет вид
Xo(p)p(jp +t,pVC,p4- JJ (8) Тогда, приравняв
Y,3;С9)
,Y,(10)
5Y,Y,+Y,Y3Y, -:,; (Ц)
Y,Y,Y, :,,(12)
получим уравнения настройки регулятора. Регулятор позволяет понизить порядок объекта управления с четвер- 0 того до первого, имея всего один дифференциатор в -основном контуре управления, что достигнуто благодаря введению обратной связи по ускорению. Такой регулятор трехкратно диф- 5 ференцируют задаюпшй сигнал, но уровень высокочастотных шумов в задающем сигнале несравненно меньше, чем в сигналах обратной связи. Устранить влияние высокочастотных шумов в за- 0 дающем сигнале и предотвратить перегрузки в системе при его резком изменении можно, включив последовательно с первым входом регулятора ;задатчик интенсивности, представляю- 5 ВДИй собой инерционное звено первого или второго порядка.
Информация о скорости поступает в регулятор с выхода интегратора 8, Q ЧТО уменьшает вредное влияние на его работу измерительных шумов, присут- ствуюш 1х в выходном сигнале датчика скорости.
Таким образом, система управления позволяет обеспечить высокое
5
быctpoдeйcтвиe и точность регулирования электропривода, имеет широкий диапазон применения, обладает повышенной помехозащищенностью.
Формула изобретения
Самонастраивающаяся система управления, содержащая регулятор, первый вход которого соединен с выходом задатчика, а второй вход, через датчик положения - с первым выходом объекта управления, сумматор, подключенный выходом к входу объекта управления, последовательно соединенные эталонную модель и первый элемент сравнения, последовательно соединенные интегратор и второй элемент сравнения, подключенный вторым входом через датчик скорости к второму выходу объекта управления, отличающаяся тем, что, с целью повьппения точности и расширения обСоставитель В. Кузин Редактор А. Гулько Техред Л.Сердюкова
Заказ 7899/44 Тираж 864Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полигра4 ическое предприятие, г, Ужгород, ул. Проектная, j
ласти применения системы, содержит датчик тока, первый усилитель-преобразователь и третий элемент сравнения, подключенный вторым входом к выходу эталонной модели, а выходом - к входу интегратора и третьему входу регулятора, четвертый вход которого соединен с первым входом эталонной модели и выходом интегратора, пятый
вход - с выходом второго усилителя- преобразователя, а выход - с вторым входом эталонной модели и первым входом сумматора, второй вход первого элемента сравнения подключен через
датчик тока к третьему выходу объекта управления, а выход, через первый усилитель-преобразователь - к второму входу сумматора.
Корректор Н. Король

| название | год | авторы | номер документа |
|---|---|---|---|
| Самонастраивающаяся система управления | 1983 |
|
SU1158974A1 |
| Самонастраивающаяся система управления | 1980 |
|
SU962852A2 |
| Самонастраивающаяся система управления | 1985 |
|
SU1249478A1 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1990 |
|
RU2011286C1 |
| СПОСОБ КОМПЕНСАЦИИ ВЛИЯНИЯ ГАРМОНИЧЕСКИХ КОЛЕБАНИЙ МОМЕНТА НАГРУЗКИ В ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2608081C2 |
| СПОСОБ АДАПТИВНОГО УПРАВЛЕНИЯ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМОЙ С ГАРМОНИЧЕСКИМ МОМЕНТОМ НАГРУЗКИ В ШИРОКОМ ДИАПАЗОНЕ СКОРОСТЕЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2020 |
|
RU2761780C1 |
| Самонастраивающаяся система управления | 1979 |
|
SU845143A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМОЙ | 2010 |
|
RU2428735C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМОЙ С ВЯЗКОУПРУГОЙ КИНЕМАТИЧЕСКОЙ СВЯЗЬЮ | 2010 |
|
RU2446552C2 |
| СПОСОБ АДАПТИВНОЙ КОМПЕНСАЦИИ ВЛИЯНИЯ ГАРМОНИЧЕСКИХ КОЛЕБАНИЙ МОМЕНТА НАГРУЗКИ В ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2565490C1 |
Изобретение относится к области самонастраивающихся систем управления. Цель изобретения - повьппение точности и расширение области применения системы. Она содержит регулятор 1, эталонную модель 2, первый элемент сравнения 3, первый усилитель-преобразователь 4, сумматор 5, второй элемент сравнения 6, второй усилитель-преобразователь 7, третий элемент сравнения 8, интегратор 9, объект 10 управления, датчик 11 тока, датчик 12 скорости, датчик 13 положения. Цель достигается за счет введения элементов 4, 7, 8, II и новых связей. 1 ил.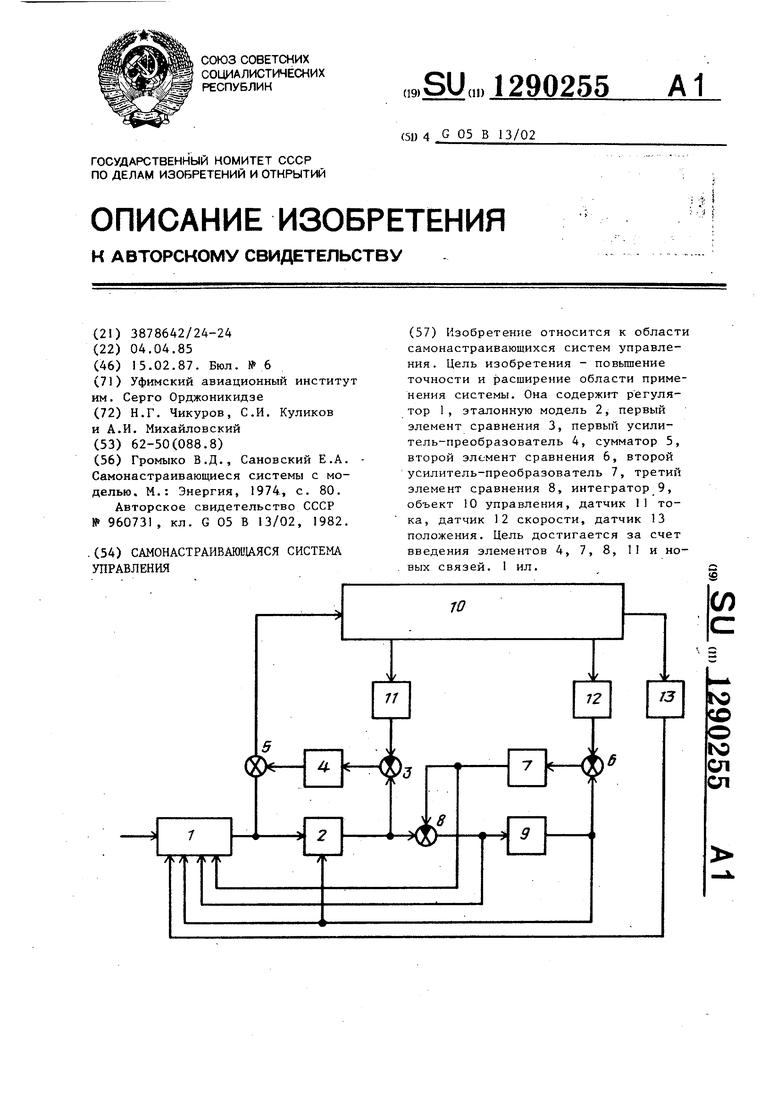

| Громыко В.Д., Сановский Е.А | |||
| Самонастраивающиеся системы с моделью | |||
| М.: Энергия, 1974, с | |||
| Капельная масленка с постоянным уровнем масла | 0 |
|
SU80A1 |
| Самонастраивающийся регулятор | 1981 |
|
SU960731A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Видоизменение прибора для получения стереоскопических впечатлений от двух изображений различного масштаба | 1919 |
|
SU54A1 |
