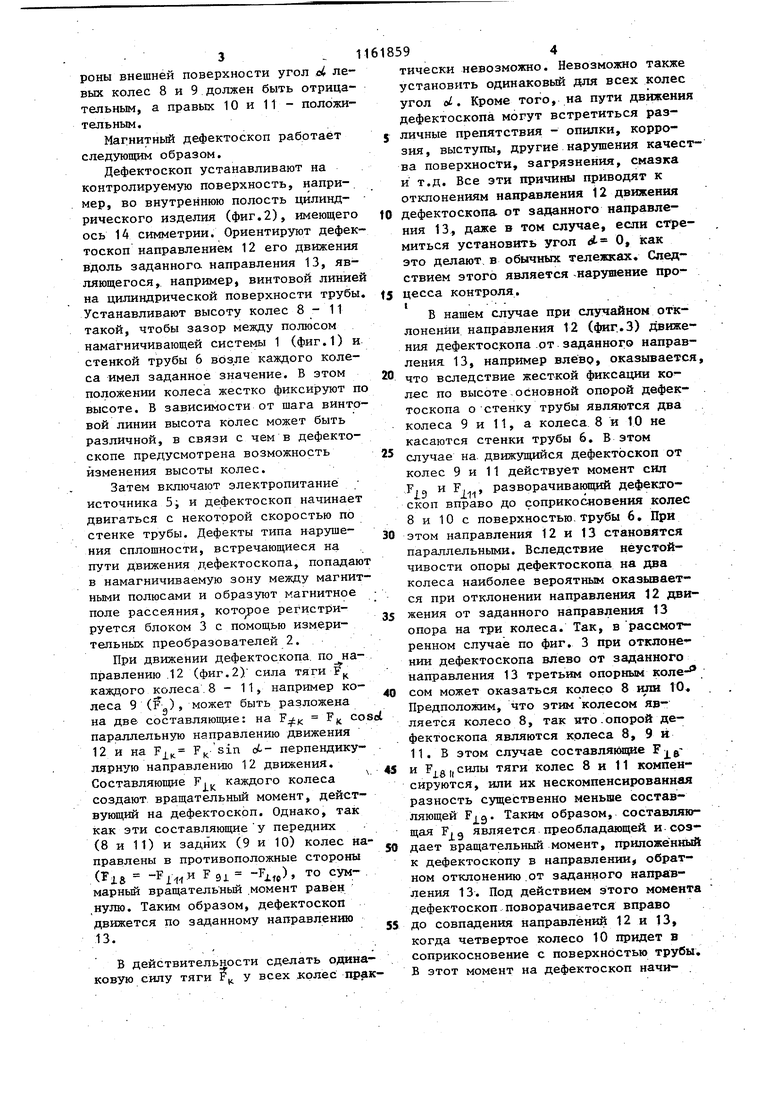
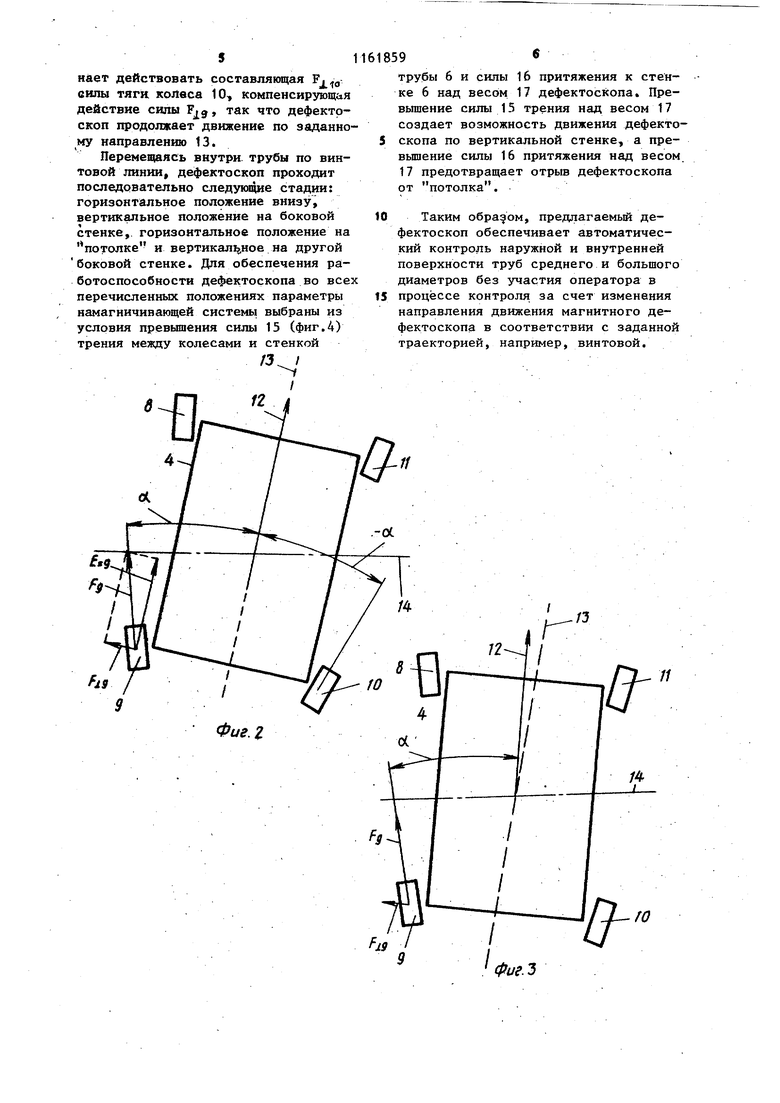
Изобретение относится к испытания материалов и изделий магнитным методом и предназначено для использования в металлургии, для контроля качества внутренней и наружной поверхностн ферромагнитных.труб и цилиндров среднего и большого диаметра, а также может быть использовано в энер гетической и химическрй промышленности для контроля резервуаров, котлов, трубопроводов большого диаметра Известно устройство магнитного контроля внутренней поверхности стальных труб магистральных нефтеи газопроводов, содержащее намагничивающую систему, измерительные преобразователи, записывающую аппаратуру и автономный источник электроэн.ергии. Намагничивающая система выполнена в виде двух цилиндрических полюсов, располагаемых соосно контролируемой трубе, а измерительные преобразователи расположены между полюсами. Все устройство вьгаолнено в виде одного или нескольких соединенных соосно между собой цилиндрических снарядов, устанавливаемых в контролируемую трубу. При перемещении внутри трубы стенки трубы намагничиваются, а магнитное поле рассекания дефектов.регистрируется с помощью измерительных преобразователей }, Недостатки устройства - его громоздкость, невозможность контроля наружной поверхности толстостенных труб, а также невозможность контроля коротких цилиндров, котлов, цистерн. Наиболее близким к изобретению по технической сущности является магнит ный дефектоскоп для контроля цилинд рических объектов., содержащий намагничивающую систему, измерительные преобразователи, блок регистрации и тележку, которая может выполняться в виде самоходного шасси. Намагничивающая система установл на на .тележке, приводимой в движени оператором, и соединена кабелем с блоком питания. В процессе контроля . устройство перемещается под наблюде нием оператора по внутренней стенке контролируемого изделия. При этом стенка изделия намагничивается пере менным полем электромагнита, а магн ное ;Поле рассеяния над- дефектами ре гистрируется с помощью измерительны преобразователей (например, феррозондов) 2 3. Недостаток данного устройства обусловлен низкой производительностью контроля, цилиндрических объектов и объектов с винтовой поверхностью, что обусловлено необходимостью управления оператором движением тележки по заданной траектории. Цель изобретения - повышение производительности контроля. Поставленная цель достигается тем, что в магнитном дефектоскопе для контроля цилиндрических объектов, содержащем,намагничивающую систему, измерительные преобразователи, блок регистрации и тележку, выполненную в виде самоходного шасси, левые колеса тележки установлены под острым углом одного знака, правые - под острым углом другого знака относительно направления движения тележки и соединены с тележкой с возможностью установки и жесткой фиксации каждого колеса на заданной высоте. На фиг. 1 показан магнитный дефектоскоп; на фиг.2 - расположение магнитного дефектоскопа в трубе, вид сверху; на фиг.З - схема сил, действующих на дефектоскоп при отклонении его от заданного направления движения; на фиг,4 - то же, в положении его на вертикальной стенке и на потолке. Магнитный дефектоскоп (фиг.1) содержит намагничивающую систему 1, измерительные преобразователи 2, блок 3 регистрации, .самоходное шасси 4 и источник 5 электрического тока. Намагничивающая система 1 выполнена в виде П-образного магнита, установленного на шасси 4 полюсами к контроглируемой стенке трубы 6 так, что силовые линии 7 магнитного поля замы-, каются через стенку трубы 6, благодаря чему дефектоскоп притягивается I.к стенке. Левые колеса 8 и 9 (фиг.2) и правые колеса 10 и 11 повернуты попарно под острым угломо(и| л/4) в противоположные стороны относительно направления 12 движения дефектоскопа. Для контроля внутренней поверхности цилиндрических изделий угол d левых колес 8 и 9 относительно направления 12 движения положителен, а правых - отрицателен. Для контроля цилиндрического изделия со стоРОНЫ внешней поверхности угол « левых колес 8 и 9 должен быть отрица тельным, а правых 10 и 11 - положительным. Магнитный дефектоскоп работает следующим образом. Дефектоскоп устанавливают на контролируемую поверхность, например, во внутреннюю полость цилиндрического изделия (фиг.2), имеющего ось 14 симметрии. Ориентируют дефек тоскоп направлением 12 его движения вдоль заданнога направления 13, являющегося, например, винтовой линие на цилиндрической поверхности трубы Устанавливают высоту колес 8-11 такой, чтобы зазор между полюсом намагничивающей системы 1 (фиг.1) и стенкой трубы 6 возле каждого колеса имел заданное значение. В этом положении колеса жестко фиксируют п высоте. В зависимости от шага винто вой линии высота колес может быть различной, в связи с чем в дефектоскопе предусмотрена возможность изменения высоты колес. Затем включают электропитание источника 5; и дефектоскоп начинает двигаться с некоторой скоростью по стенке трубы. Дефекты типа нарушения сплошности, встречающиеся на пути движения дефектоскопа, попадаю в намагничиваемую зону между магнит ными полюсами и образуют магнитное поле рассеяния, кото)ое регистрируется блоком 3 с помощью измерительных преобразователей 2. При движении дефектоскопа, по направлению .12 (фиг.2) сила тяги F каждого колеса.8 - 11, например колеса 9 (F), может быть разложена на две составляющие: на F; i co параллельную направлению движения 12 и на F., sin оС- перпендикулярную направлению 12 движения. Составляющие F||, каждого колеса создают вращательный момент, действующий на дефектоскоп. Однако, так как эти составляющиеу передник (8 и 11) и задних (9 и 10) колес на правлены в противоположные стороны dig -FI.H Fgi -Fitj), то суммарный вращательный .момент равен ,нулю. Таким образом, дефектоскоп движется по заданному направлению 13. В действительности сделать одина ковую силу тяги F у всех колес пра тически невозможно. Невозможно также установить одинаковый для всех колес угол о. Кроме того, на пути движения дефектоскопа могут встретиться различные препятствия - опилки, коррозия, выступы, другие нарушения качества поверхности, загрязнения, смазка и т.д. Все эти причины приводят к отклонениям нанравления 12 движения дефектоскопа от заданного направления 13, даже в том случае, если стремиться установить угол d- О, как это делают в обычных тележках. Следствием этого является -нарушение про- цесса контроля. t -. В нашем случае при случайном отклонении направления 12 (фиг.З) движения дефектоскопа от заданного направления 13, например влево, оказывается, что вследствие жест-кой фиксации ко лес по высоте основной опорой дефек- . тоскопа о стенку трубы являются два колеса 9 и 11, а колеса 8 и 10 не касаются стенки трубы 6. В этом случае на. движущийся дефектоскоп от колес 9 и 11 действует момент сил F,g и Fj., разворачивающий дефектоскоп вправо до соприкосновения колес 8 и 10 с поверхностью, трубы 6 При этом направления 12 и 13 становятся параллельньми. Вследствие неустойчивости опоры дефектоскопа на два колеса наиболее вероятньм оказывается при отклонении направления 12 движения от заданного направления 13 опора на три колеса. Так, в рассмотренном случае по фиг. 3 при отклонении дефектоскопа влево от заданного направления 13 третьим опорным колесом может оказаться колесо 8 или ТО - т Предположим, что этим колесом ярляется колесо 8, так нто-опорой дефектоскопа являются колеса В, 9 и 11. В этом случае составлягацие и ,, силы тяги колес 8 и 11 компенсируются, или их нескомпенсированная разность существенно меньше составляющей . Таким образом, составляющая является преобладающей и создает вращательный момент, приложен1ШЙ к дефектоскопу в направлении, обратном отклонению от заданного направления 13. Под действием этого момента дефектоскоп поворачивается вправо до совпадения направлений 12 и 13, когда четвертое колесо 10 придет в соприкосновение с поверхностью трубы. этот момент на дефектоскоп начи5
нает действовать составляющая Fi сипы тяги колеса 10, компенсирующая действие сипы , так что дефектоскоп продолжает движение по заданному направлению 13.
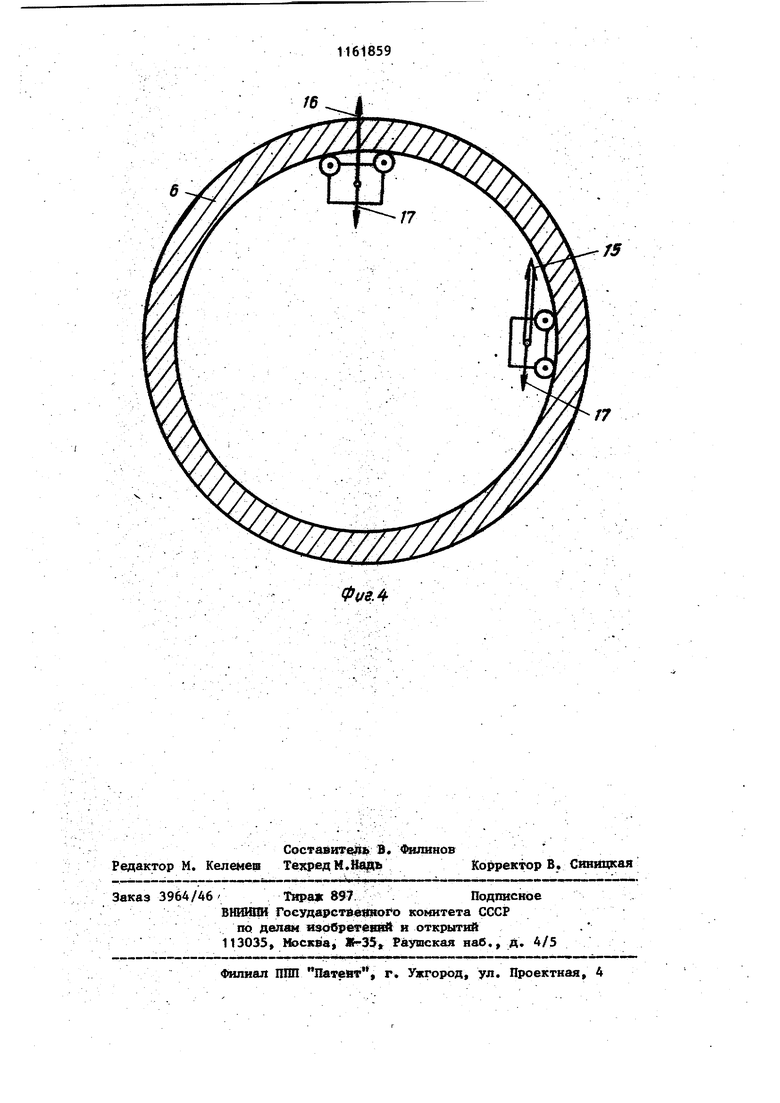
Перемещаясь внутри трубы по винтовой линии, дефектоскоп проходит последовательно следующие стадии: горизонтальное положение внизу, вертикальное положение на боковой стенке, горизонтальное положение на потолке и вертикаль ное на другой боковой стенке. Для обеспечения работоспособности дефектоскопа во все перечисленных положениях параметры намагничивающей системь выбраны из условия превышения силы 15 (фиг.4) трения между колесами и стенкой
Ч
61859в
трубы 6 и силы 16 притяжения к стенке 6 над весом 17 дефектоскопа. Превьшение силы 15 трения над весом 17 создает возможность движения дефектоскопа по вертикальной стенке, а превьппение силы 16 притяжения над весом. 17 предотвращает отрыв дефектоскопа от потолка.
10 Таким образом, предлагаемый дефектоскоп обеспечивает автоматический контроль наружной и внутренней поверхности труб среднего и большого диаметров без участия оператора в
15 процессе контроля за счет изменения направления движения магнитного дефектоскопа в соответствии с заданной траекторией, например, винтовой.
фие.З
ФигЛ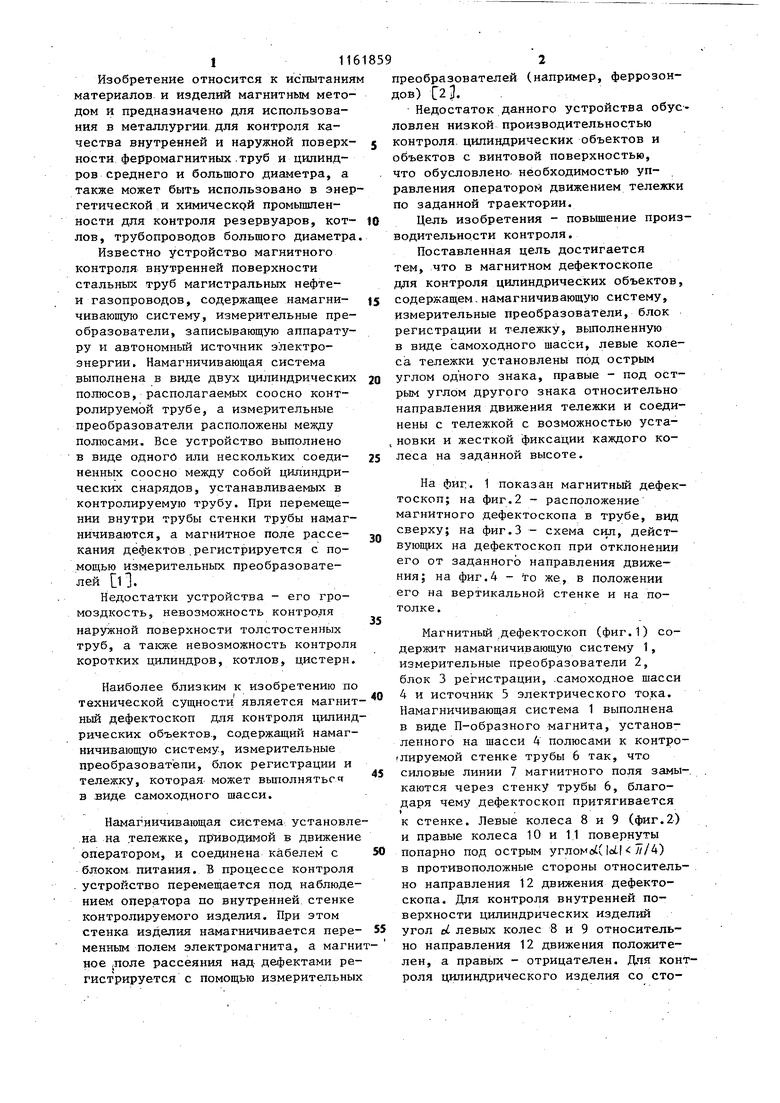
| название | год | авторы | номер документа |
|---|---|---|---|
| МАГНИТНЫЙ ДЕФЕКТОСКОП | 2005 |
|
RU2295721C2 |
| Устройство для магнитометрической диагностики наземных трубопроводов и емкостей без удаления изоляционного покрытия | 2020 |
|
RU2736143C1 |
| Магнитная система сканера-дефектоскопа | 2016 |
|
RU2680103C2 |
| ЭЛЕКТРОМАГНИТНЫЙ ПРЕОБРАЗОВАТЕЛЬ ДЛЯ НЕРАЗРУШАЮЩЕГО КОНТРОЛЯ | 1995 |
|
RU2112234C1 |
| МАГНИТОЭЛЕКТРИЧЕСКИЙ ДАТЧИК ДЕФЕКТОВ | 1995 |
|
RU2098809C1 |
| СПОСОБ БЕСКОНТАКТНОГО НЕРАЗРУШАЮЩЕГО КОНТРОЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2017 |
|
RU2661312C1 |
| МАГНИТОЭЛЕКТРИЧЕСКИЙ ДАТЧИК ДЕФЕКТОВ | 1995 |
|
RU2095803C1 |
| СКАНИРУЮЩИЙ ДЕФЕКТОСКОП | 2009 |
|
RU2402760C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ СТЕНОК ТРУБОПРОВОДОВ | 2011 |
|
RU2453835C1 |
| АППАРАТ ВНУТРИТРУБНОГО КОНТРОЛЯ И СПОСОБ ПЕРЕМЕЩЕНИЯ ЕГО В МАГИСТРАЛЬНОМ ГАЗОПРОВОДЕ С ЗАДАННОЙ РАВНОМЕРНОЙ СКОРОСТЬЮ | 2010 |
|
RU2451867C2 |
МАГНИТНЫЙ ДЕФЕКТОСКОП для контроля цилиндрических объектов, содержащий намагничивающую систему, измерительные преобразователи, блок, регистрации и тележку, выполненную в виде самоходного шасси, о т л ичающийбя тем, что, с целью повышения производительности контроля , левые колеса тележки установлены под острым углом одного знака, правые - под острым углом другого, знака относительно направления дви- жения тележки и соединены с тележкой с возможностью установки и жесткой фиксации каждого колеса на заданной высоте. (Л с а сх сд со
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Патент США № 3483466, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Домашевский Б.Н., Смирнов В.И | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| М., НИИинформтяжмаш, 10-76-19, 1976, с | |||
| Пишущая машина для тюркско-арабского шрифта | 1922 |
|
SU24A1 |
