Известны различные конструкции манипуляторов для дистанционных работ, производимых в труднодоступных или опасных для жизни местах, например, для сварки трубопроводов, расположенных в трубных коридорах и т. п. Такие манипуляторы состоят из нескольких поворотных пустотелых стержней с пустотелыми валами и коническими шестернями для передачи установочных и рабочих движений от головки управления к исполнительной головке, укрепленной на конце одного из таких стержней.
Однако такие манипуляторы при наличии телескопических соединений конструктивно сложны и не обеспечивают выполнения последовательно нескольких технологических операций.
Описываемый манипулятор обеспечивает возможность последовательного выполнения нескольких технооюгнческкх операций за счет того, что он выполнен из четырех прямолинейных стержней, которые сэсдпнеий между собой шарнира.ми. Причем первый стержень выполнен с виде вертикальной колонны, несет головку управления и снабжен механизмом для перемещения в вертикальном направлении, второй и третий стержни снабжены шарнирами, которые допускают перемещения в горизонта: ьной плоскости, а четвертый стерлсень несет исполнительную головку и снабжен двойным шарниром для поворота вокруг вертикальной и горизонтальной осей. Такое выполнение манипулятора обеспечивает возможность исполнительной головке выполнять последовательно различные технологические операции, например, дефектоскопию и сварку трубопровсда, для чего исполнительная головка выполняется из дефектоскопа для определения места повреждения, фрезерной головки для разделки поврежденной зоны под сварку и сварочной головки для заварки поврежденной зоны.
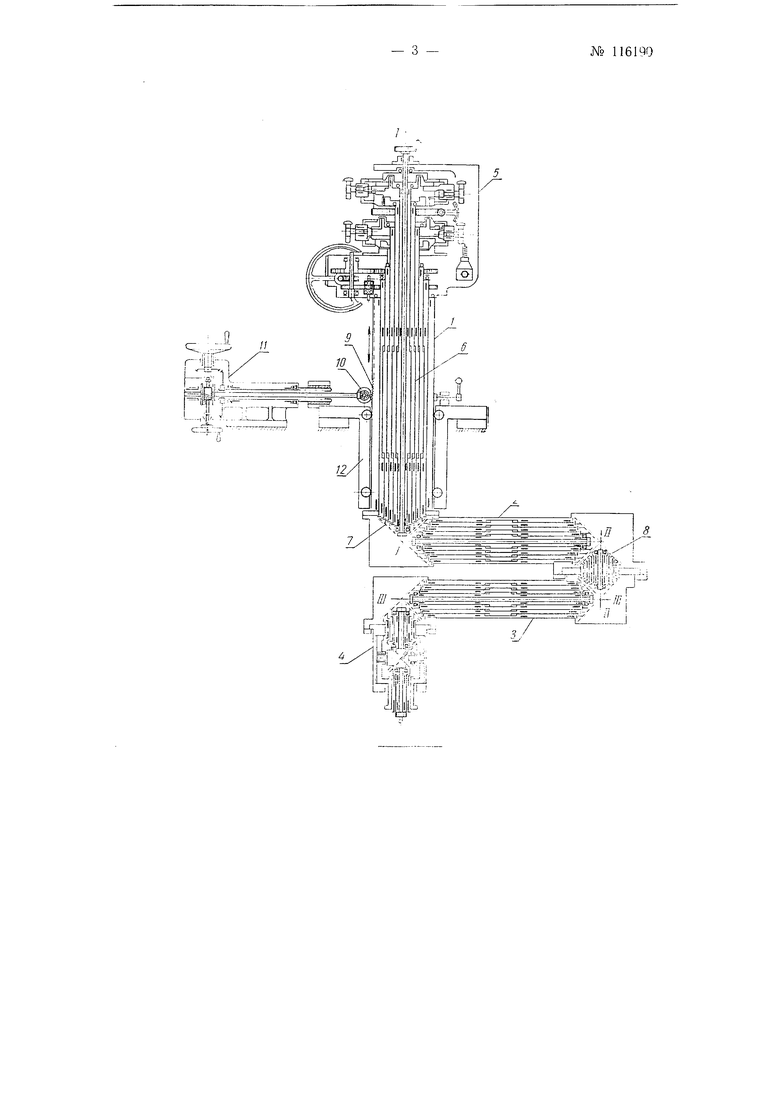
На чертеже изображена схема :-.;а;;кпу.:;;тора.
Манипулятор состоит из четырех пустотелых стержней /, 2. 3 4, на конце последнего из которых укреплена нсполпительная голоптса с комнj o 116190- 2 -
лектом :леханизмов, например, дефектоскопом, фрезерно , сварочноГг головкой и другие (на чертеже не показаны), зправление которыми осушествляетск от головки 5 управления, раеположенной в верхней части стержня /. Для осуш;ествления исполнительной головкой необходимых движений в стержнях 1, 2, 3 i-i 4 расположено необходимое число лини механических связей, выполненных в виде систем пустотелых валов 6, снабженных коническими зубчатыми колесами 7 .При этом соединение стержней и линий механических связей, расположенных в стержнях выполнено шарнирным так, что стержень 5 может вращаться в горизонтальной плоскости вокруг вертикальной оси I-I стержня 1; стержень 3-- в горизонтальной п юскости вокруг вертикальной оси II-II; стержень 4- в вертикальной плоскости вокруг горизонтальной оси III-III стержня .3. Шарнир, посредством которого соединены стержни 2 и 5 содержит систему независимых один от другого конических дифференциалов 8, позволяющих передавать с головки уппанления необходимые установочные к рабочие перемещения как элементов самого манинулятора, так и механизмов, которыми оснащена исполнительная головка. Описанная схема работы манипулятора позволяет расположить стержень 4 в любой точке зоны пространства, определяемой плопхадыо окружности с радиусом, раг.ным суммарной длине стержней 2 н 3, а по высоте равной двум длинам стержня 4 (с учетом размеров нсполнительной головки).
Для обеспечения возможности охвата исполнительными органами следующей по расположению области пространства стержень } манинулятора выполнен подвижным в вертикальном направлении и снабжен рейкой 9, входящей в заценление с зубчатым колесом 10, которое является последним звеном механизма 1J для перемещения в вертикальном г{аправлен11И, установленного на несущем корпусе 12, который может быть выполнен подвижны:,, например, вдоль трубного коридора.
Пред м е т и з о б р е т е н и я
Манипулятор для дистанционного управления рабочими процессами, например, сваркой трубопроводов при их ремонте в труднодоступных местах, состоящий из нескольких новоротных пустотелых стержней, в которых смонтированы пустотелые валы с коническими шестернями для передачи установочных и рабочих движений от головки управления к исполнительной головке, укрепленной на конце одного из таких стержней, отличающийся тем, что, с целью обеспечепня нсполнительной головкой последовательного осун ествления технологических операций, например, дефектоскопии и сварки, манипулятор состоит нз четырех прямолинейных стержней, соединенных между собой шарнирами, нричем первый стержень выполнен в виде вертикальной колонны, несет головк управления и снабжен механизмом для перемещения в вертикальном направлении, второй и третий стержни снабжены шарнирами, допускающими перемещения в горизонтальной плоскости, а четвертый стержень несет исполнительную головку и снабжен двойным шарниром д.ля поворота вокруг вертикальной и горизонтальной осей.