О)
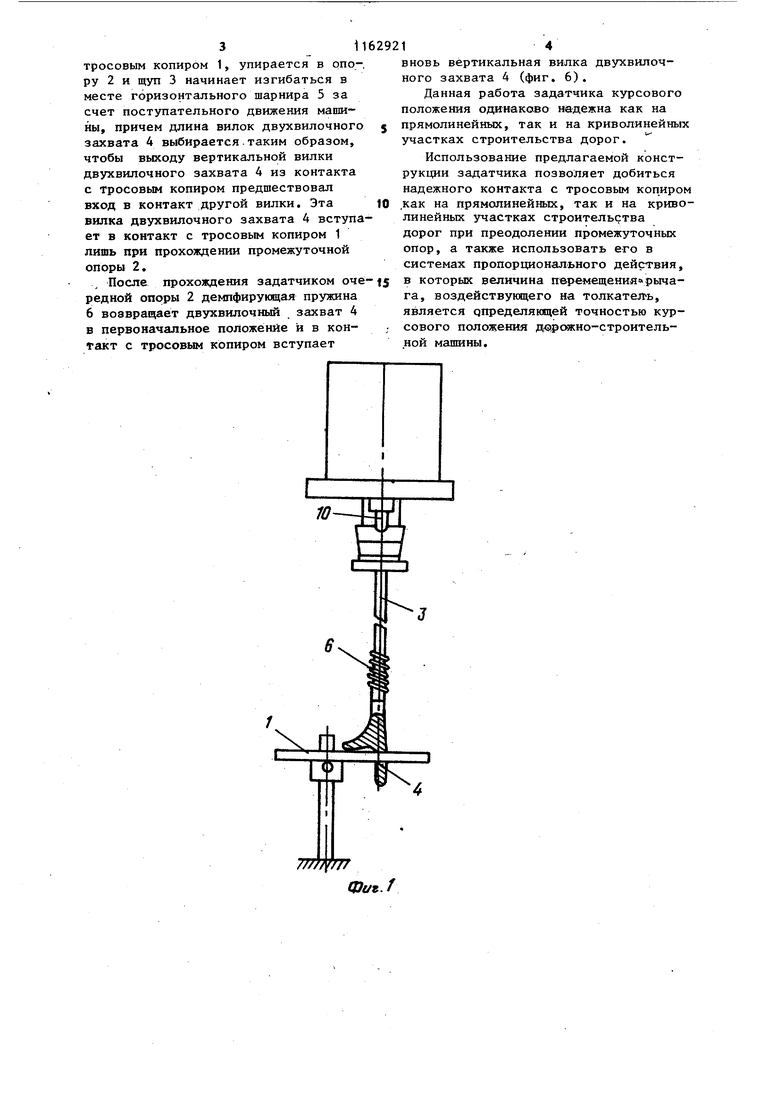
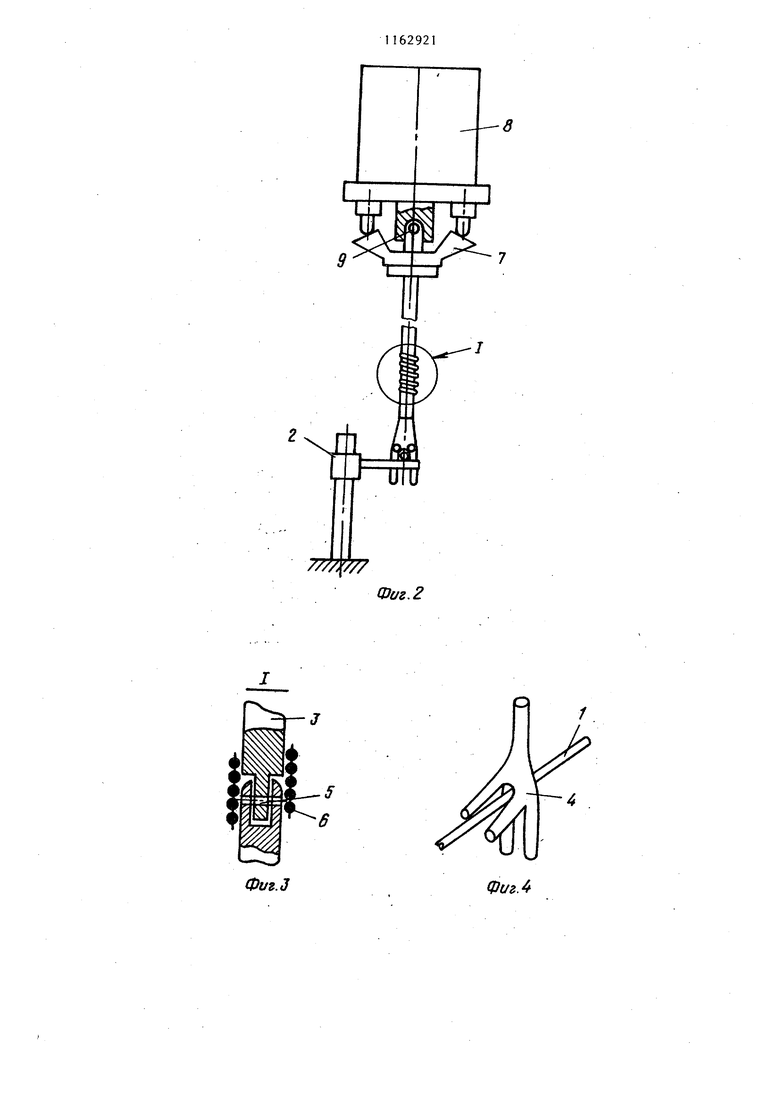
ьэ Изобретение относится к автоматизации строительно-дорожных ма1Ш1н, а именно к задатчикам курсового положения, используемым в системах управления курсом движения машины. 5 Известно приспособление к землеройной машине, включающее шарнирнорычажный механизм, приспособление, указатель изменения положения рабочего органа lj .JO Недостатком данного приспособления является низкая точность вьщержи- . вания заданного курса. Наиболее близким техническим решением к предлагаемому является задат-15 чик курсового положения рабочего органа, включакяций установленный на раме машины посредством горизонталь ;ного шарнира двуплечий рычаг с щупом связанный с датчиком курса, имеющим толкатель опоры с натянутым между ними тросовым копиром, с которым взаимодействует щуп 2j . Недостатки известного задатчика заключаются в том, что он имеет боль шие габариты, что в условиях строительства дорог часто недопустимо, имеет незадемпфированные значительно разнесенные массы, которые под действием возмущающих воздействий под элементами гусеничного движителя склонны к автоколебаниям, снижающим точность вьщерживания курсового положения, а также в таком задатчике величина управляющего сигнала зависит от расстояния между горизонтальным шарниром рычага и точкой контакта щупа с копиром и может изменяться независимо от управлякяцих воздействий, что не позволяет использовать его в системах пропорционального действия. Цель изобретения - повьшение точности регулировки положения рабочего органа. Поставленная цель достигается тем, что в задатчике курсового положения рабочего органа землеройной машины, включающем установленный на раме машины посредством горизонтального шарнира двуплечий рычаг с щупом связанный с датчиком курса, имеющим толкатель опоры с натянутым между ними тросовым копиром, с которым взаимодействует щуп, последний вьтол ней из двух стержней, связанных между собой посредством горизонтального шарнира и упругого элемента. причем один из стержней жестко связан с двуплечим рычагом, а другой снабжен вилочным захватом установленным с возможностью взаимодействия с тросовым копиром, а каждое плечо двуплечего рычага установлено с возможностью взаимодействия с толкателем датчика курса. На фиг. 1 изображен задатчик курсового положения, вид сбоку на фиг. 2 - то же, вид спереди; на фиг.З - узел 1 на фиг. 2J на фиг.4 двухвилочный захват; на фиг. 5 - машина с задатчиком, вид спереди; на Фиг. 6 - прохождение задатчиком промежуточной опоры. Задатчик курсового положения рабочего органа землеройной машины состоит из тросового копира 1,натянутого между опорами 2, щупа 3, выполненного в виде двух стержней, соединенных посредством горизонтального шарнира 5 и упругого элемента, вьшолненного в виде демпфирующей пружины 6. На конце одного стержня щупа 3 расположен двухвилочньй зах;Ват 4, а противоположный шарниру конец другого стержня жестко закреплен на двуплечем рычаге 7, которьй в свою очередь связан с датчиком 8 курса посредством горизонтального шарнира 9 и контактирует, например, с толкателями 10. Задатчик курсового положения работает следующим образом. Перед началом движения машины двухвилочный захват 4. щупа 3 устанавливается на тросовый копир 1. При движении машины вертикальная вилка двухвилочного захвата 4 постоянно контактирует с тросовым копиром. При изменении курсового положения машины щуп 3 изменяет свое положение и через двуплечий рычаг 7 воздействует на толкатели 10 редукционных клапанов датчика,8 курса, причем чем больше изменяет свое положение щуп 3, тем на большую величину перемещается двуплечий рычаг 7, воздействующий на толкатели 10. Таким образом, величина сигнала управления пропорциональна отклонению щупа 3, которьй может преобразовываться в датчике 8 курса в пропорциональньй гидравлический сигнал. При подходе к очередной опоре 2 вертикальная вилка двухвилочного захвата 4, находящаяся в контакте с тросовым копиром 1, упирается в опору 2 и щуп 3 начинает изгибаться в месте горизонтального шарнира 5 за счет поступательного движения машины, причем длина вилок двухвилочного захвата 4 выбирается.таким образом, чтобы выходу вертикальной вилки двухвилочного захвата А из контакта с тросовым копиром предшествовал вход в контакт другой вилки. Эта вилка двухвилочного захвата 4 вступа ет в контакт с тросовым копиром 1 лишь при прохождении промежуточной опоры 2. После прохождения задатчиком оч редкой опоры 2 демпфирующая пружина 6 возвращает двухвилочный захват 4 в первоначальное положение и в контакт с тросовым копиром вступает 1 1 вновь вертикальная вилка двухвилочного захвата 4 (фиг. 6). Данная работа задатчика курсового положения одинаково надежна как на прямолинейных, так и на криволинейных участках строительства дорог. Использование предлагаемой конструкции задатчика позволяет добиться надежного контакта с тросовым коциром .как на прямолинейных, так и на криволинейньк участках строительства дорог при преодолении промежуточных опор, а также использовать его в системах пропорционального действия, в которых величина п времещений рычага, воздействунлдего на толкатеЛь, является дпределяющей точностью курсового положенш ддарснжно-строительной машины.
в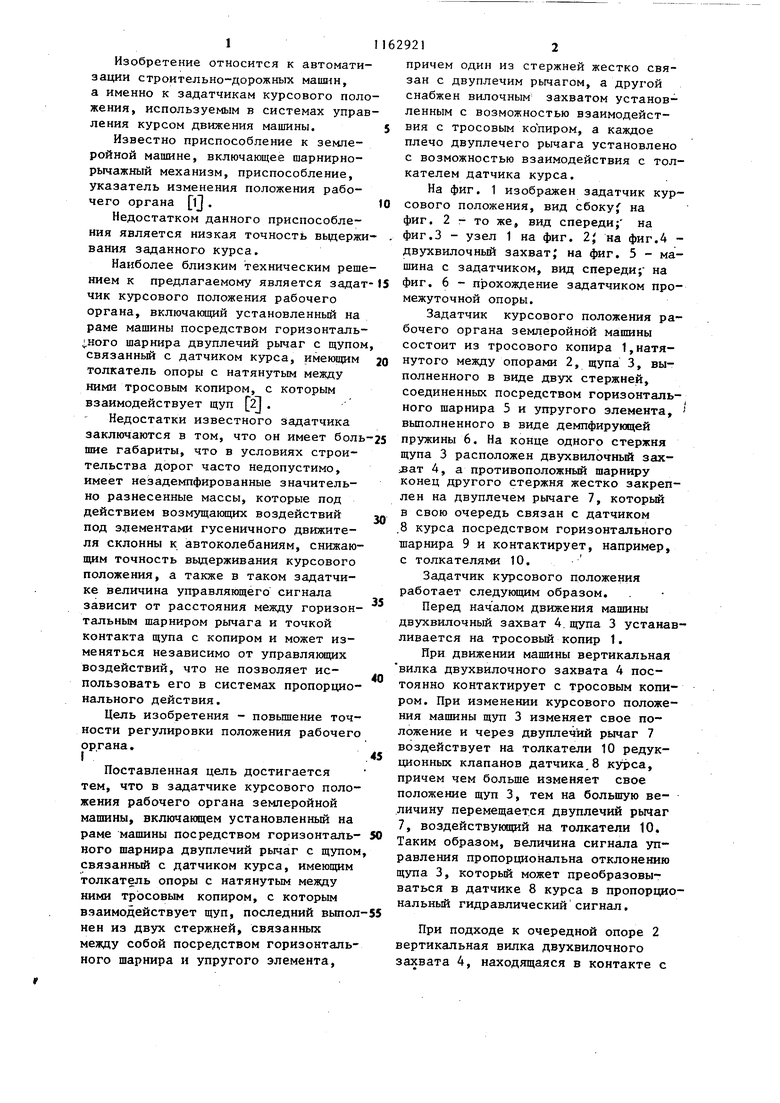
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления рабочим органом в горизонтальной плоскости землеройной машины непрерывного действия | 1984 |
|
SU1234498A1 |
| Устройство контроля положения рабочего органа и курса движения дорожно-строительной машины | 1983 |
|
SU1148949A1 |
| Датчик глубины копания землеройной машины непрерывного действия | 1978 |
|
SU740903A1 |
| Устройство контроля заданного курса движения дорожно-строительной машины | 1984 |
|
SU1240838A1 |
| Задатчик положения рабочего органа машин типа планировщика | 1977 |
|
SU655788A1 |
| Механизм зигзага швейной машины | 1979 |
|
SU857318A1 |
| Механизм зигзага швейной машины | 1980 |
|
SU962360A1 |
| Система управления рабочим органом в горизонтальной плоскости двухгусеничной землеройной машины | 1985 |
|
SU1265266A1 |
| Устройство для обработки почвы в рядах растений | 1981 |
|
SU988209A1 |
| Полуавтомат для контроля и отбраковки ламп накаливания | 1982 |
|
SU1121722A1 |

ЗАДАТЧЖ КУРСОВОГО ПОЛОЖЕНИЯ РАБОЧЕГО ОРГАНА ЗЕМЛЕРОЙНОЙ МАШИНЫ, включаклций установленный на раме машины посредством горизонтального шарнира двуплечий рычаг с щупом, связанный с датчиком курса имеющим толкатель опоры с натянутым между ними тросовым копиром, с которым взаимодействует щуп, отличающийся тем, что, с целью повьшения точности регулировки положения рабочего органа, щуп вьтолнен из двух стержней, связанньгх между собой посредством горйзЬнтайЪИого шарнира, и упругого элемента, причем один из стержней жестко связан с двзНплечим рычагом, а другой снабжен вилочным захватом, установленным с возможностью взаимодействия с тросовым копиром, а каждое плечо двуплечего рычага установлено с возможностью взаимодействия с толкателем датчика курса.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Визирное приспособление к канавной машине или траншеекопателю | 1948 |
|
SU87282A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Задатчик положения рабочего органа машин типа планировщика | 1977 |
|
SU655788A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
