Изобретение относится к устройствам контроля заданного тросовым копиром курса движения дорожно-строительных машин.
Целью изобретения является повышение точности контроля.
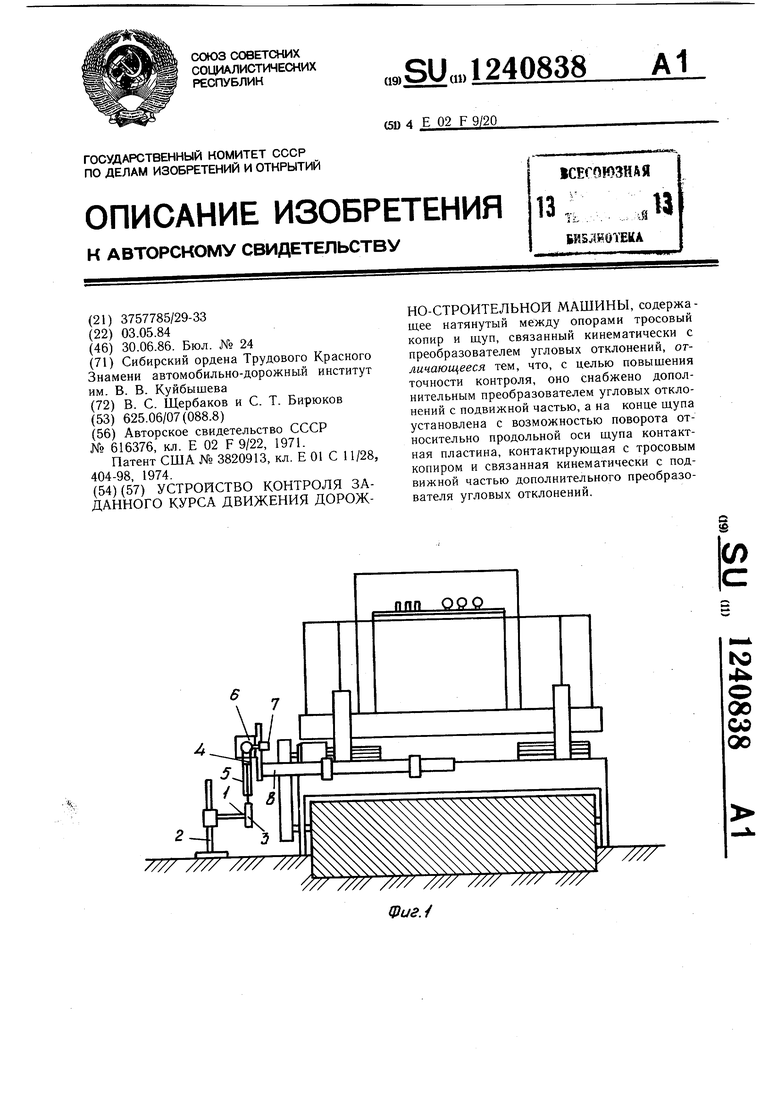
На фиг. 1 изображено устройство, установленное на дррожно-строительной машине, вид спереди; на фиг. 2 - то же, вид сбоку; на фиг. 3 - то же, аксонометрия; на фиг. 4 - схема управления объектом по заданному копиром .курсу по двум координатам: линейному отклонению h и угловому отклонению У; на фиг. 5 - щуп в развернутом положении.
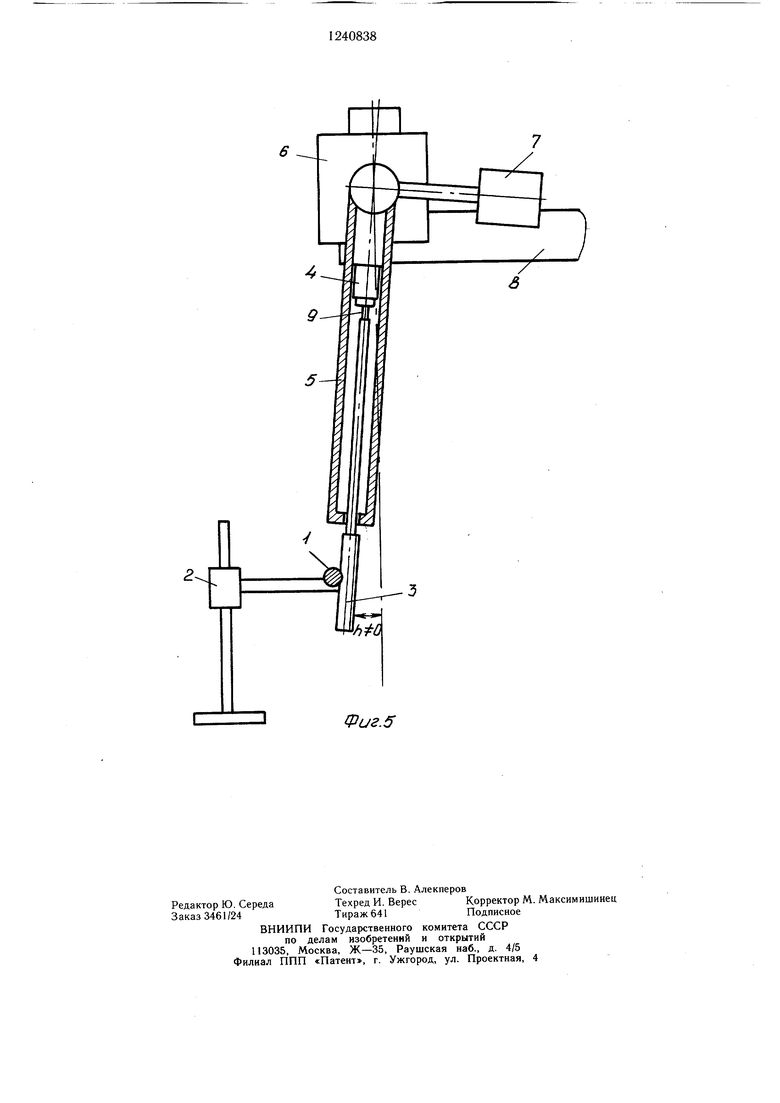
Устрайство контроля заданного курса движения дорожно-строительной машины включает тросовый копир 1, закрепленный на опорных стойках 2, контактную пластину 3, связанную с подвижной частью дополнительного преобразователя 4 угловых отклонений в сигнал управления, щуп 5, связанный с преобразователем 6 угловых отклонений в сигнал управления, противовес 7, кронштейн 8, подвижную часть 9 дополнительного преобразователя 4.
При движении машины по заданному тросовым копиром 1 курсу, угол отклонения в вертикальной плоскостиОС ш,упа 5 равен О, соответственно линейное отклонение h также равно О, контактная пластина 3, соприкасающаяся всей плоскостью с тросовым копиром 1, ориентирована так, что сигнал управления отсутствует, т. е. курсовой угол равен 0.
При отклонении машины под действием возмущающих воздействий от заданного копиром 1 курса движения происходит отклонение контактной пластины 3 в продольной плоскости и отклонение щупа 5 в вертикальной плоскости« С-, которые воздействуют соответственно на преобразователи 4 и 6 угловых отклонений в сигнал управления - происходит ликвидация ошибки курса движения вначале по линейному отклонению h, а затем по курсовому углу У.
Положение точки на плоскости определяется двумя координатами, положение объекта - тремя, появляется еще одна координата, связанная с ориентацией объекта управления. При движении машины по заданному копиром курсу, точность движения будет определять координата, связанная с линейным отклонением, и координата, связанная с ориентацией объекта. Координата, связанная с перемещением, на точность движения влияния не оказывает и является информационным параметром, по которому судят о пройденном пути. Таким образом для идеального управления машиной по заданному курсу, необходимо иметь информацию, соответственно управлять по линейному отклонению h и курсовому углу У .
Устройство работает следуюшим образом
Копир 1 взаимодействует с контактной пластиной 3, которая жестко связана с под
0
5
0
5
0
5
5
0
5
вижной частью 9 преобразователя 4 угловых отклонений, например вращающегося потенциометра, установленного на щупе 5, при этом контактная пластина 3 имеет возможность поворота на угол Y относительно продольной оси щупа 5.
Конструктивно преобразователь угловых отклонений 6 и дополнительный преобразователь 4 угловых отклонений представляют собой преобразователь угла поворота, например вращающийся потенциометр.
Преобразователь 6 угловых отклонений содержит корпус (неподвижная часть), жестко связанный с кронштейном 8, и подвижную часть, жестко связанную с щупом 5 и противовесом 7.
Преобразователь 6 угловых отклонений и дополнительный преобразователь 4 угловых отклонений связаны с регистрирующим прибором посредством электрических проводов.
Контактная пластина 3 имеет две степени свободы: угол поворота V относительно продольной оси щупа 5, который преобразуется в электрический сигнал преобразователем, неподвижная часть дополнительного преобразователя 4 жестко закреплена на щупе 5, а подвижная часть 9 жестко связана с контактной пластиной 3, вращающейся на угол / , угол поворота (7 контактной пластины 3 и шупа 5 относительно оси вращения преобразователя 6, который преобразуется в электрический сигнал преобразователем, неподвижная часть преобразователя 6 жестко соединена с кронштейном 8, а подвижная часть жестко соединена с шупом 5, поворачивающимся вместе с контактной пластиной 3 на угол об.
Таким образом два угла поворота контактной пластины 3 и об во взаимно перпендикулярных плоскостях преобразуются в электрические сигналы преобразователем 6 и дополнительным преобразователем 4, имеющим перпендикулярные оси вращения, причем неподвижная часть преобразователя 4 жестко закреплена на подвижной части преобразователя 6.
Использование предлагаемого устройства позволит повысить точность заданного курса движения за счет одновременного контроля, при помощи одного устройства, двух координат, определяющих точность курсового движения, а также исключения возможности автоколебательного режима, к которому склонна система при управлении по одной координате. Повышение точности заданного курса движения дорожностроительной машины приводит к экономии строительных материалов и повышению качества поперечного профиля земляного полотна.
//// //// //// //// //// //// //// //// //// //// ////
Фиг. 2
Фиг.5
О
О
Фиг. 4
Фиг. б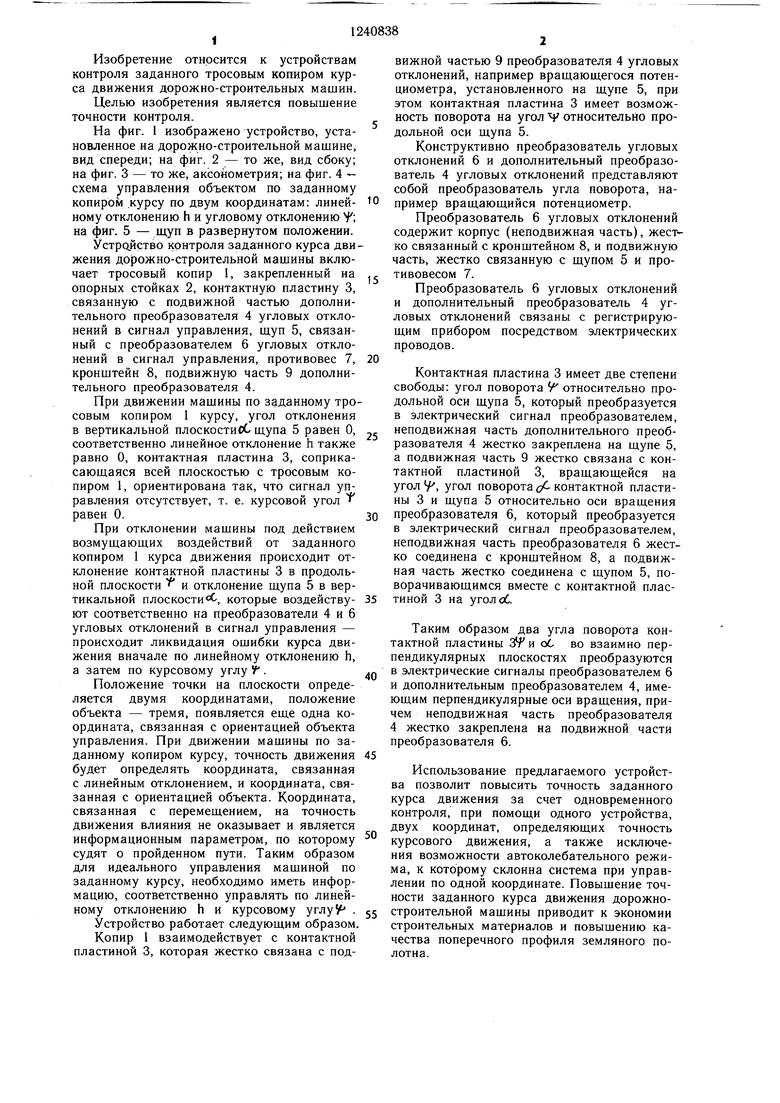
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления рабочим органом в горизонтальной плоскости землеройной машины непрерывного действия | 1984 |
|
SU1234498A1 |
| Задатчик курсового положения рабочего органа землеройной машины | 1984 |
|
SU1162921A1 |
| Устройство контроля положения рабочего органа и курса движения дорожно-строительной машины | 1983 |
|
SU1148949A1 |
| Устройство для контроля курса движения транспортного средства при его подъезде к заданному объекту | 1987 |
|
SU1495418A1 |
| УСТРОЙСТВО ДЛЯ НЕПРЕРЫВНОГО ИЗЛ1ЕРЕНИЯ КУРСОВОГО УГЛА САМОХОДНОЙ МАШИНЫ ОТНОСИТЕЛЬНО ЗАДАННОЙПРЯМОЙ | 1969 |
|
SU235344A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ РАБОЧИМ ОРГАНОМ БУЛЬДОЗЕРА | 1991 |
|
RU2016172C1 |
| Устройство для управления движением трактора | 1980 |
|
SU1014489A1 |
| СПОСОБ УПРАВЛЕНИЯ ЭКВИДИСТАНТНЫМ ДВИЖЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА И СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВОГО И ЛИНЕЙНО-БОКОВОГО ОТКЛОНЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА ОТ ОПОРНОЙ ТРАЕКТОРИИ | 1992 |
|
RU2032926C1 |
| Устройство для автоматического вождения самоходного агрегата | 1988 |
|
SU1605953A1 |
| Устройство автоматического управления движением землеройно-транспортной машины по заданному курсу | 1987 |
|
SU1550053A1 |

| Система автоматического выжерживания курса землеройной машины | 1971 |
|
SU616376A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Патент США № 3820913, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
