Изобретение относится к дорожностроительным машинам поточного действия с жестким креплением рабочего органа к раме базовой машины в горизонтальной плоскости и предназначено для автоматического управления рабочим органом в этой плоскости, которое, осуществляется посредством автоматического управления машиной по курсу, заданному тросовым копиром.
Цель изобретения повышение устойчивости движения машины по заданному курсу.
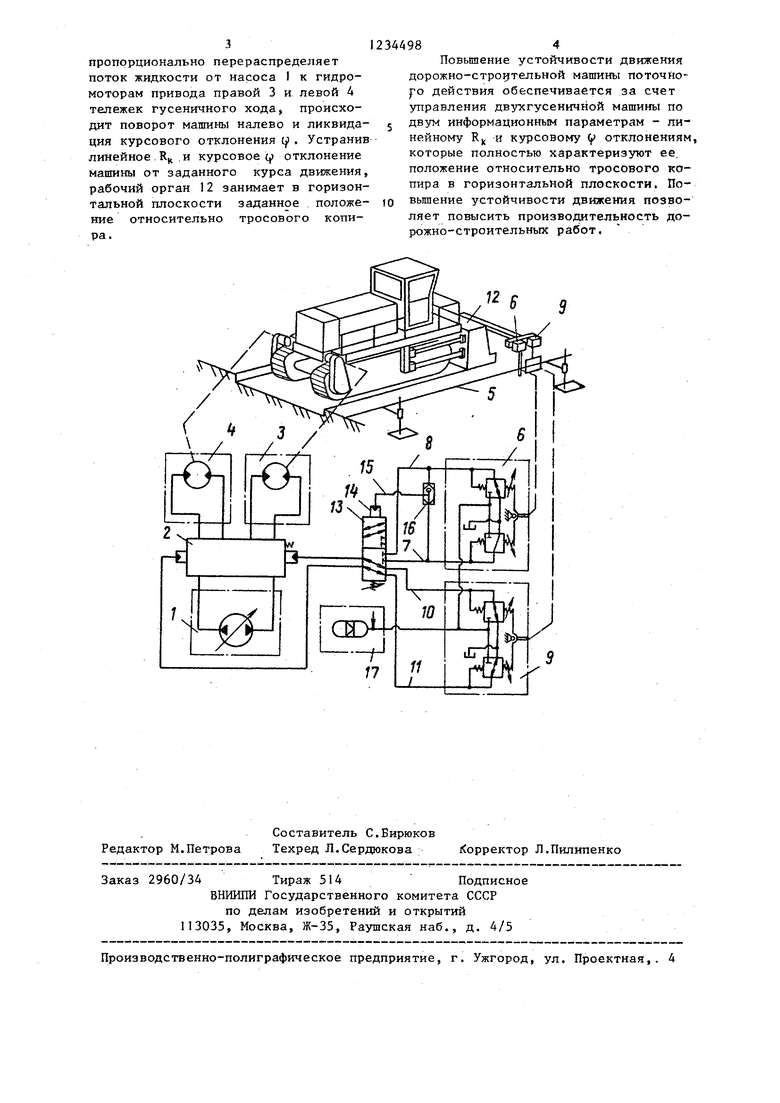
На чертеже изображена принципиальная гидравлическая схема системы управления.
Система управления рабочим органом в горизонтальной плоскости землеройной машины непрерывного действия содержит насосную станцию 1 переменной производительности, управляемый делитель 2 потока, гидромоторы привода правой 3 и левой 4 тележек гусеничного хода, натянутый между опорами тросовый копир 5, щу- повой датчик 6 линейного отклонения с гидролиниями 7 и 8 управления, щуповой датчик 9 курсового отклонения с гидролкниями 10 я П управления, которые установлены посредством кронштейна на рабочем органе 12, распределитель 13 переключения с -камерой 14 управления и гидролинией 15 управления, логический клапан ИЛИ 16, аккумуляторный блок 17 для запитки датчиков линейного 6 и курсового 9 отклонений.
Система работает следующим образом .
При перемещении рабочего органа 12 в горизонтальной плоскости в допустимых пределах относительно тросо вого копира 5 щупы датчиков линейного б и курсового 9 отклонений находятся в нейтральном положении, при этом они контактируют с тросовым копиром 5 и перемещаются по нему. Сигнал управления, формируемый щуповы- ми датчиками линейного 6 и курсового 9 отклонений, на управляемом делителе 2 потока отсутствует. Рабочая л(ид кость от насосной станции I двумя потоками с равными расходами поступает в гидромоторы привода правой 3 и левой 4 тележек гусеничного хода, которые вращаются с одинаковой угловой скоростью. Дорожно-строительная
2344982
машина перемещается по курсу, заданному тросовым копиром 5.
Если -под действием управляеш.к и неуправляемых возмущающих воздейст5 зий происходит отклонение рабочего органа 12 в горизонтальной плоскос - ти от заданной траектории перемещения относительно тросового копира 5, то соответственно происходит линей- tO нее и курсовое отклонение дорожностроительной машины от заданного курса движения. Шуп датчика 6 линейного отклонения отклоняется из нейтраль кого положения в поперечной плоскос- 15 ти, например вправо, на величину R
и формирует в гидролинии 8 сигнал управления - давление управления, который по величине пропорционален отклонению машины. Под действием дав20 ления угфавления в камере 14 золотник распределителя 13 переключения занимает положение, при котором датчик 5 линейного отклонения соединяется посредством гидроликий 7 и 8
с управляе ым делителем 2 потока, который пропорционально величине сигнала управления перераспределяет поток жидкости о т насосной станции I к гидромоторам привода правой 3 и
30 левой 4 тележек гусеничного хода, происходит поворот машины направо и ликвидация линейного отклонения Rj. Щуп датчика 6 линейного отклонения занимает нейтр;альнов положение, в
3,- гидролиниях 7 и 8 давление управления становится равным нулю, распределитель 13 переключения занимает положение, при котором датчик 9 курсового отклонения соединяется посредст40 вом гидролкний 0. и 1 с управляемым делителем 2 потока. Однако в момент ликвидации огяибки по линейно- Kiy отклонению R, ошибка по курсовому отготопению (J дорожно-строительной
45
машины от заданного курса движения
всегда больше нуля. Щуп датчика 9 курсового отклонения повернут в горизонтальной плоскости относительно нейтрального положения влево, в результате чего на управляемом делителе 2 потока формируется сигнал управления - давление управления, но У7ке противоположного знака в сравнении со знаком предьщущего управлягащего сигнала по линейному отклонв ншо Rf;. 5 правляемый делитель 2 потока в зависимости от величины сигнала управления по курсовому отклонению
пропорционально перераспределяет поток жидкости от насоса I к гидромоторам привода правой 3 и левой Д тележек гусеничного хода, происходит поворот мапганы налево и ликвидация курсового отклонения if . Устранив линейное.RH .и курсовое (f отклонение Машины от заданного курса движения, рабочий орган 12 занимает в горизонтальной плоскости заданное положение относительно тросового копира.
Повышение устойчивости движения дорожно-строутельной машины поточно- j o действия обеспечивается за счет управления двукгусеничной машины по двум информационным параметрам - линейному RJJ и курсовому (f отклонениям, которые полностью характеризуют ее. положение относительно тросового копира в горизонтальной плоскости. Повышение устойчивости движения позволяет повысить производительность до- рожно-строительных работ.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления рабочим органом в горизонтальной плоскости двухгусеничной землеройной машины | 1985 |
|
SU1265266A1 |
| Устройство автоматического управления движением землеройно-транспортной машины по заданному курсу | 1987 |
|
SU1550053A1 |
| Система управления движением по курсу двухгусеничной машины | 1986 |
|
SU1379145A1 |
| Устройство контроля положения рабочего органа и курса движения дорожно-строительной машины | 1983 |
|
SU1148949A1 |
| Устройство контроля заданного курса движения дорожно-строительной машины | 1984 |
|
SU1240838A1 |
| Задатчик курсового положения рабочего органа землеройной машины | 1984 |
|
SU1162921A1 |
| Проходческо-добычный комбайн | 1985 |
|
SU1288293A1 |
| Устройство для вождения многоопорной дождевальной машины | 1983 |
|
SU1142063A1 |
| Гидравлический привод колеснойМАшиНы | 1979 |
|
SU806484A1 |
| СПОСОБ УБОРКИ ПЛОДОВ И ЯГОД И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2104631C1 |

Составитель С.Бирюков Редактор М.Петрова Техред Л.Сердюкова Корректор Л.Пилипенко
Заказ 2960/34 Тираж 514Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная,. 4
| Способ управления направлением движения машинно-тракторного агрегата | 1982 |
|
SU1053769A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Монастырский О.В | |||
| Профилировщик земляного полотна и стабилизированных оснований с автоматическим управлением | |||
| - Механизация строительства, 1977, № 1, с | |||
| Прибор с двумя призмами | 1917 |
|
SU27A1 |
| Бирюков С.Т | |||
| Математическое описание системы управления гидрообъем- Hbw приводом хода профилировщики | |||
| - Сб | |||
| Гидропривод и системы управления машин для земляных работ, Омск, СибАДИ, 1983, с | |||
| Способ изготовления звездочек для французской бороны-катка | 1922 |
|
SU46A1 |
