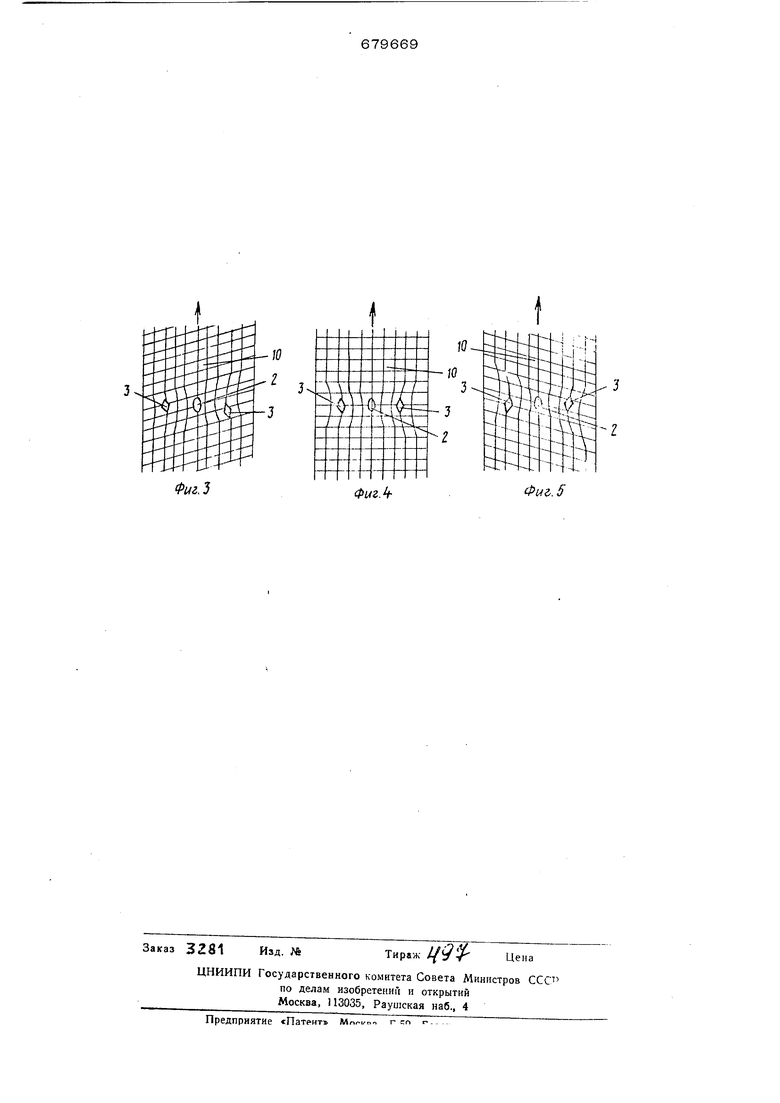
I Mo время iittGoTbi ткань 10 проходит можму прижатыми /ifiyi к лругу ролика.11 1 и 2, при этом на ткани образуется М(;стиое сужение и (эсновиые кити получа|(,)т волпооб{.1азноо ъ плоскости ткани дви- жриие. i opiiiHna yKaoainioii волны всегда лежит на yTonfiofl питй, соприкасающейся с верхним роликом 2 в самой нижней его точке, а направление движения нитей в iii;puf nie волны всегда совпадает с нап р/шлоннем движения nojiOTna ткани.
11 случае отсутствия перекоса утка ткани (фиг. 4 ), чувствительные колеса 3 устанйгзливаются так, что их ючки касания ткани находятся на участке перегиба кривой, обрагзоваиной оС1ЮВ 1ыми нитями, т. е в вершине волны и колеса 3 вместе с рычагами 4 и осями 6 под действием движущейся ткаки находятся в плоскостях,параллельных направлению движе 1ия основных нитей, т. е. направлению движения по- лотрта ткани.
При наличии перекоса утка ткани (фиг. и 5 ) уточная нить, на которой лежат все точки перегибов основных нитей, повернута относительно нормального положения и под точками касания чувствительных коjsec 3 с тканью попадают подходящие или отходяппте от вершины ветви волны образованной основными нитями, вследствие чего чувствительные колеса 3 поворачиваются влево или вправо (в плоскости чер- теяса, фиг. 2). Этот поворот преобразуетс с помо1ьью чувствительного, например, штлуктивного преобразователя в электрически
сигнал и срабатывает исполнительный ofi- ган, который будет отрабатывать до тех пор, когда уточная нить займет гюложение, при котором под точки касания чувсчьи - тельных колес 3 с тканью подойдут участки волн, образованных основными нитями. Где движение прямолинейно, и тогда сигнал исчезает.
Если перемещать чувствитель 1ые элементы 4 Вдоль ткани 10 вперед или назад относительно искажающего элемента, то можно получить любое желаемое положение уточной нити.
Перемещение чувствительных элементов осуществляется микрометрическим 6 ;гайкой 7 и рычагом 8, который поворачивается на оси 9.
Формула изобретения
г
1. Датчик перекоса утка TKaHVr, соде1: жаший искажающий элемент и симметрично расположенные относительно него чувствительные элементы, втлполненные в BVI- де тел вращения, отличающийся тем, что, с целью повышения эф()ектнвности пропоса, точки контакта искажающего и чувствительного элементов с ткатгью расположены в Одной плоскости.
2. Датчик по п. 1, отличающийся тем, что искажающий элемент tiMOOT два контактирующих ролика, расположенные один над другим, верхний ролик имеет выпуклую рабочую поверхность, а нижнийвогнутую.
Фиг.5 Фиг. Фи1.5

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля перекоса утка ткани | 1983 |
|
SU1164344A1 |
| Ткацкий станок с волнообразно-подвижным зевом | 1981 |
|
SU1144621A3 |
| Способ устранения перекоса ткани на сушильно-ширильной машине | 1980 |
|
SU1006558A1 |
| ДАТЧИК ПЕРЕКОСА УТОЧНЫХ НИТЕЙ | 1970 |
|
SU274081A1 |
| Устройство для устранения перекосов уточных нитей в тканях | 1986 |
|
SU1361213A1 |
| ТКАЦКИЙ СТАНОК | 1970 |
|
SU263521A1 |
| АВТОМАТ ПРАВКИ УТКА | 1973 |
|
SU386043A1 |
| СПОСОБ АНАЛИЗА ГЕОМЕТРИЧЕСКИХ СТРУКТУРНЫХ ПАРАМЕТРОВ ТКАНИ | 2000 |
|
RU2164686C1 |
| Способ тканеформирования на бесчелночном ткацком станке и устройство для его осуществления | 1974 |
|
SU706028A3 |
| УСТРОЙСТВО для КОНТРОЛЯ и ИСПРАВЛЕНИЯ ПЕРЕКОСОВ УТКА В ТКАНИ НА ЗАПУСКЕ В МАШИНЫ ОТДЕЛОЧНОГО | 1968 |
|
SU212221A1 |