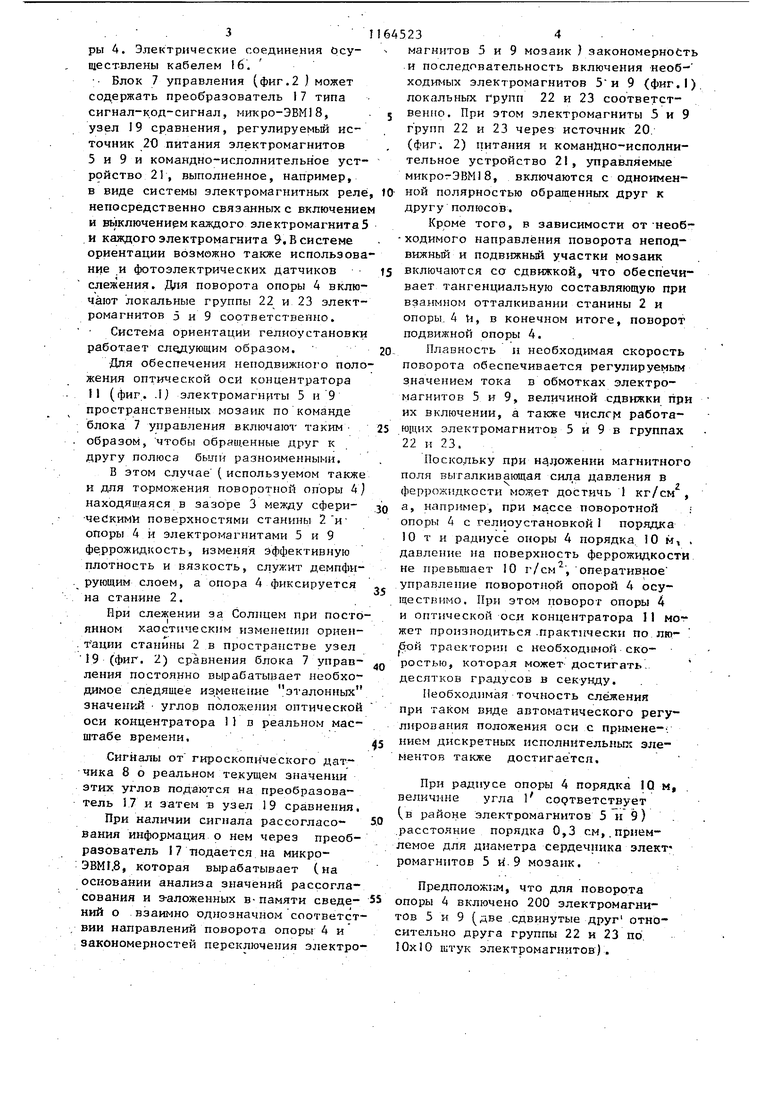
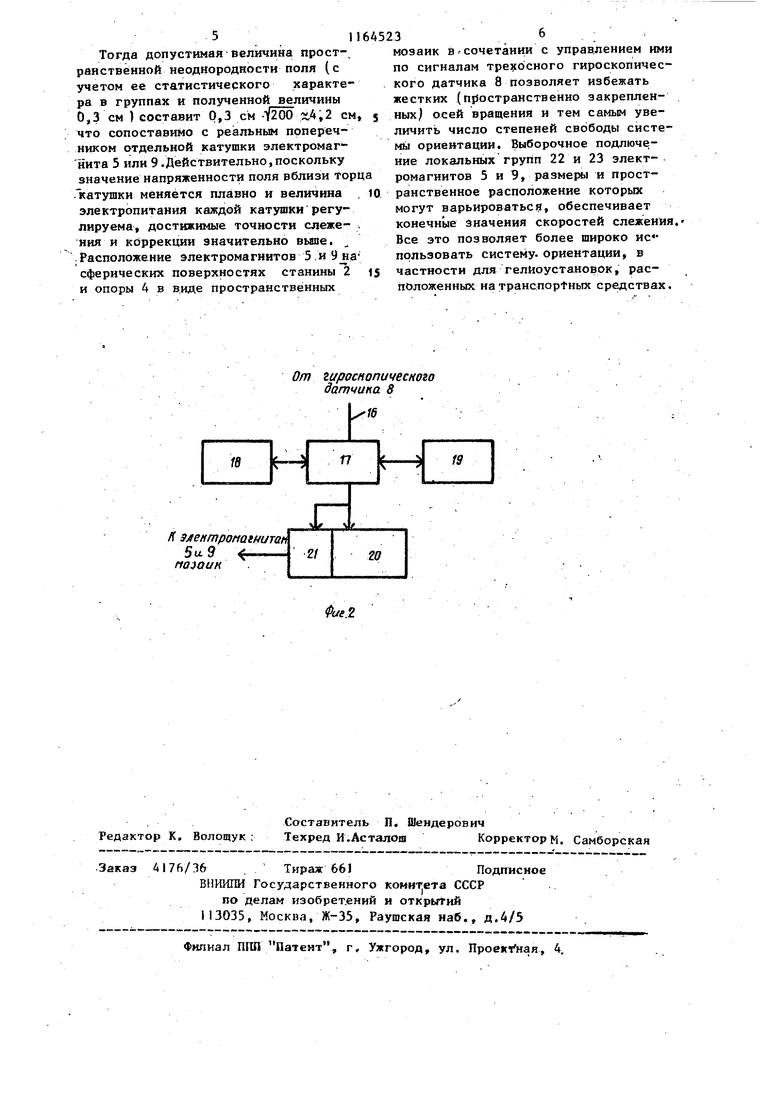
. . . I ., . Изобретение относится к гелиотехнике, в частности, к системам ориентации гелиоустановок. ИэвестНа система ориентации гелиоустановки, содержащая станину, расположенную на ней с зазором поворотную опору, вьшолненную из немагнитного материала, закрепленные на.станине электромагниты, взаимодействующие посредством магнитного потока с элементами, закрепленными на поворотной опоре, и блок управ-; лення, электрически связанный с электромагнитами СJ. В этой системе ориентации на станине закреплены электромагниты продольного и поперечного, перемещения, а поворотная опора имеет дугообразйую форму и на ней закреплены пальцы, взаимодействующие с электромагнитами. Система снабжена электромагнитным стопором., отключаеьым на время поворота. Однако использование такой систем ориентации на транспорте, энергопита ние которого обеспечивается за счет солнечной онергии, затруднено ограни чением углов, скоростей и направлеН1| -слежеим при двухо.сной ориентации, Цель изобретения - расширение области применения системы ориентации. Под:тавленная цель достигается тем что система ориентации гелиоустановки, содержащая станину, расположенну на ней с зазором поворотную опору, вьшолненную из немагнитного материала, закрепленные на станине электромагниты, взаимодействующие посредством магнитного потока с элементами, закрепленными на поворотной опоре, и блок управления, электрически связан ный с электромагнитами, снабжена электрически соединенньш с блоком уяравлеиия трехосш.-.1м гироскопическим датчиком, станина и поворотная опора выполнены сферической формы, а закрепленные на последней элементы - в виде электромагнитов, причем электромагниты расположены .на станине и поворотной опоре с образованием пространственных мозаик, Кроме того, поворотная опора снаб жена обеспечивающими ее безразлично равновесное состояние перемещающимися противовесами. На фиг. показана.жонструктивная схема системы ориентации с гелНоус1232 тановкой; на фиг. 2 - функциональная схема блока управления. Система ориентации гелиоустановки I (|фиг. 1) содержит станину 2, расположенную на ней с зазором 3 поворотную опору 4, выполненную из немагнитного материала, закрепленные, на станине 2 электромагниты 5, взаимодействующие посредством магнитного потока с элементами 6, закрепленными на поворотной опоре 4, и блок 7 управления, .электрически связанный С электромагнитами 5. Система ориентации снабжена электрически соединенным с блоком 7 управления трехосным гироскопическим датчиком 8, станина-2 и поворотная опора 4 выполнены сферической формы, а закрепленные на Поворотной опоре 4. элементы 6 - в виде электромагнитов 9, причем электромагниты 5 и 9 рас- положены на станине 2 и поворотной опоре 4 соответственно с образованием пространственных мозаик. ,. Поворотная опора 4 снабжена обеспечивающими ее безразлично равновесное состояние перемещающимися противовесами 10. Станина 2 выполнена в виде сферической полости, а материалом опоры 4 служит углепластик .Опора 4 размев(ена концентрично в по-лости станины 2 на гидравлической подушке, которой служит.заполняющая зазор 3 феррожидкость, например коллоидный раствор маг-нетита в керосине , стабилизированный олеиновой кислотой. Магнитные оси электромагнитов 5 и 9 ориентированы вдоль радиусов кривизны стзнинь; 2 и опоры 4, а сами электромагниты 5 и 9 электрически соединены через блок 7 управления с гироскопическим датчиком 8, установленным в центре опо.ры 4. .Гелиоустановка 1 представляет собой концентратдр 11 и энергопреобраЗователь 12 с гибким трубопроводом 13 для теплоносителя. Для. устранения расхода феррожидкости за счет испарения при поворотах опоры 4 внешняя поверхность последней покрыта составом, не смачиваемым феррожидкостью, а края полости станины 2 снабжены кольцевым буртиком 14 из эластичного материала, . например резины. Противовесы 10 размещены на растяжках 15 внутри опоры А. Электрические соединения Осуществлены кабелем 16. Блок 7 управления (фиг.2 ) может содержать преобразователь 17 типа сигнал-К:ОД-сигнал, микро-ЭВМ 8, узел 19 сравнения, регулируемый источник 20 питания электромагнитов 5 и 9 и командно-ислолнительное устройство 21, выполненное, например. в виде системы электромагнитных реле непосредственно связанных с включение и шключениемкаждого электромагнита5 и каждого электромагнита 9, В системе ориентации возможно также использова ние .и фотоэлектрических датчиков слежения. Для поворота опоры 4 включают локальные группы 22 и 23 электромагнитов 5 и 9 соответственно. Система ориентации гелиоустановки работает следующим образом. Для обеспечения неподвижного поло жения оптической оси концентратора II (фиг. Л) электромагниты 5 и 9 пространственных мозаик по команде блока 7 управления включают таким образом, чтобы обращенные друг к другу полюса были разноименными. В этом случае ( используемом также и для торможения поворотной опоры А) находящаяся в зазоре 3 между сферичейкимИ поверхностями станины 2иопоры 4 и электромагнитами 5 и 9 феррожидкость, изменяя эффективную плотность и вязкость, служит демпфиа опора 4 фиксируется рующим слоем, на станине 2. При слежении за Солнцем при посто янном хаостическим изменении ориен. тации станины 2 в пространстве узел 19 (фиг. 2) сравнения блока 7 управления постоянно вырабатывает необходимое следящее из.менение эталонных значений углов положения оптической оси концентратора 11 в реальном масштабе времени. Сигналы от гироскопического датчика 8 о реальном текущем значении этих углов подаются на преобразователь 17 и затем в узел 19 сравнения, При наличии сигнала рассогласования информация о нем через преобразователь I7 подается на микро: ЭВМГ.8, которая вырабатывает (на основании анализа значений рассоглаСования и э-аложенных в-памяти сведений о взаимно однозначном соответст вии направлений поворота опоры 4 и закономерностей переключения электро 234 магнитов 5 и 9 мозаик ) закономерность и последовательность включения ходтдах электромагнитов 5и 9 (фиг.1). локальных Групп 22 и 23 соответствеяно. При этом электромагниты 5 и 9 групп 22 и 23 через источник 20. (фиг. 2) питания и командно-исполнительное устройство 21, управляемые микрогЭВМ18, включаются с одноименной полярностью обращенных друг к другу полюсов. Кроме того, в зависимости отнеобходимого направления поворота неподвижный и подвижньй участки мозаик включаются со сдвижкой, что обеспечивает тангенциальную составляющую при взаимном отталкивании станины 2 и опоры. 4 ti, в конечном итоге, поворот подвижной опоры 4. Плавность и необходимая скорость поворота обеспечивается регулируемым значением тока в обмотках электромагнитов 5 и 9, величиной сдвижки при их включении, а также числс работающих электромагнитов 5 и 9 в группах 22 и 23. Поскольку при н ;}оженин магнитного поля выталкивающая cmia давления в феррожидкости может достичь 1 кг/см , а, например, при массе поворотной опоры 4 с гелиоустановкой 1 порядка 10 т и радиусе опоры 4 порядка. Юм,, давление на поверхность феррожидкости не превышает 10 г/см,оперативное управление поворотной опорой 4 осуществимо. При этом поворот опоры 4 и оптической оси концентратора 11 мог жет производиться .практически по лю- бчэй траектории с необходимой скоростью, которая может достигатьдесятков градусов в секунду. Необходимая точность слежения при таком виде автоматического регулирования положения оси с примене--; нием дискретных исполнйтельньп: элементов также достигается. При радиусе опоры 4 порядка IQ м, величине угла 1 содтветствует (в районе электромагнитов 5 и 9) . .расстояние порядка 0,3 см,.приемлемое для диаметра сердечника электромагнитов 5 и . 9 мозаик. Предположим, что для поворота опоры 4 включено 200 электромагнитов 5 и 9 (две сдвинутые друг относительно друга группы 22 и 23 по. 10x10 штук электромагнитов).
Тогда допустимая величина пространственной неоднородности поля (с учетом ее статистического характера в группах и полученной величины 0,3 см ) составит 0,3 см -1/206 хА,2 см, что сопоставимо с реальным поперечником отдельной катушки эпектромагнита 5 или 9 .Действительно, поскольку значение напряженности поля вблизи торц .катушки меняется плавно и величина . электропитания каждой катушки регулируема, достижимые точности слеже- . ния и коррекции значительно вьапе. . Расположение электромагнитов 5.и 9 на сферических поверхностях станины 2 и опоры 4 в в.иде пространственных
мозаик в г сочетании с управлением ими по сигналам трехосного гироскопического датчика 8 позволяет избежать жестких (пространственно закрепленных) осей вращения и тем самым увеличить число степеней свободы системы ориентации. Выборочное подлючение локальных групп 22 и 23 электромагнитов 5 и 9, размеры и пространственное расположение которых могут варьироваться, обеспечивает конечные значения скоростей слежения Все это позволяет более широко ис пользовать систему, ориентации, в частности для гелиоустановок, расположенных на транспортных средствах.
Г. Система ориентации гелиоус-, тановки , содержащая станину, положенную на ней с зазором поворотную опору, вьшолненную из немагнитного материала, закрепленные на станине электромагниты, взаимодействукядие посредством магнитного потока . с элементами, закрепленными на погзоротной опоре, и блок управления, электрически связанный с электромагнитами, о тл ич а ющая с я тем, что, с целью расширения области применения, система снабжена электрически соедииенньмс блоком упрапления трехосным гироскопическим датчиком, станина и поворотная опоры выполнены-сферической формы, а закрепленные на последней элементы - в виде электромагнитов, причем электромагниты расположены .на станине и поворотной опоре с образованием пространственных мозаик. 2. Система по п.1, от л и ч а ю щ а я с я тем, что.поворотная сл опора снабжена обеспечивающими ее безразлично равновесное состояние перемещающимися противовесами. // Vaai О5 СП ГЧЭ СХ х
От гироснопичесного датчика 8
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Веникодробильный станок | 1921 |
|
SU53A1 |
| Способ получения роговидного материала | 1940 |
|
SU67613A2 |
