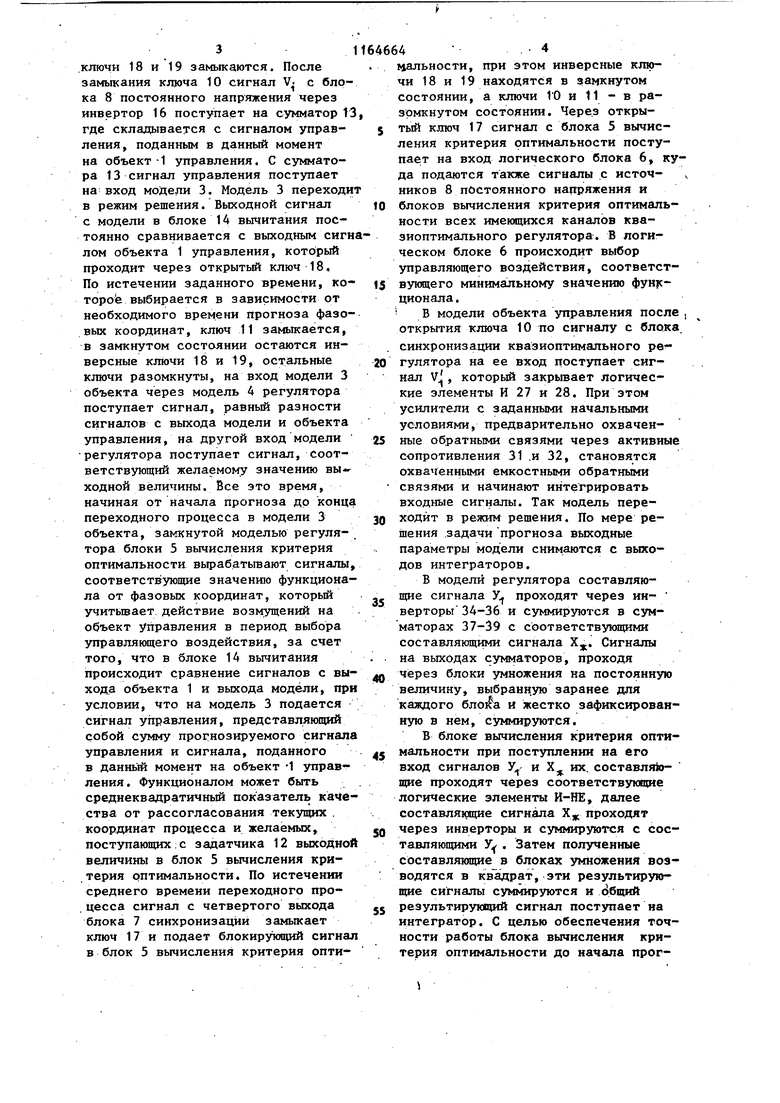
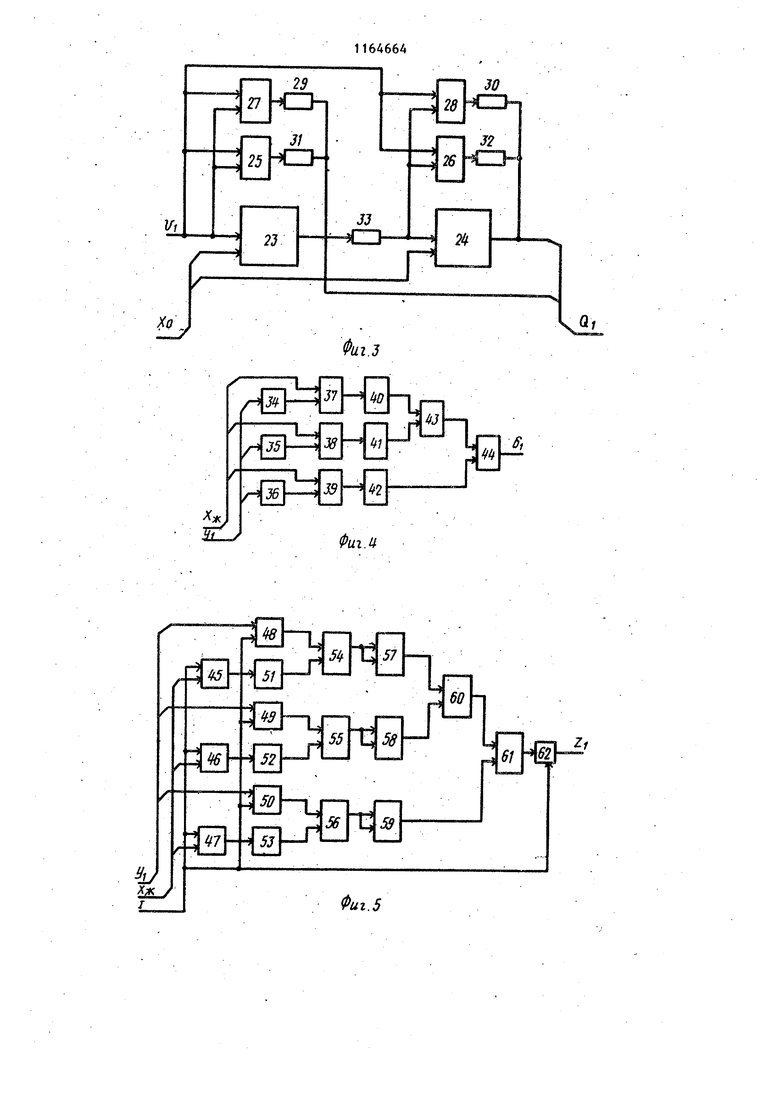
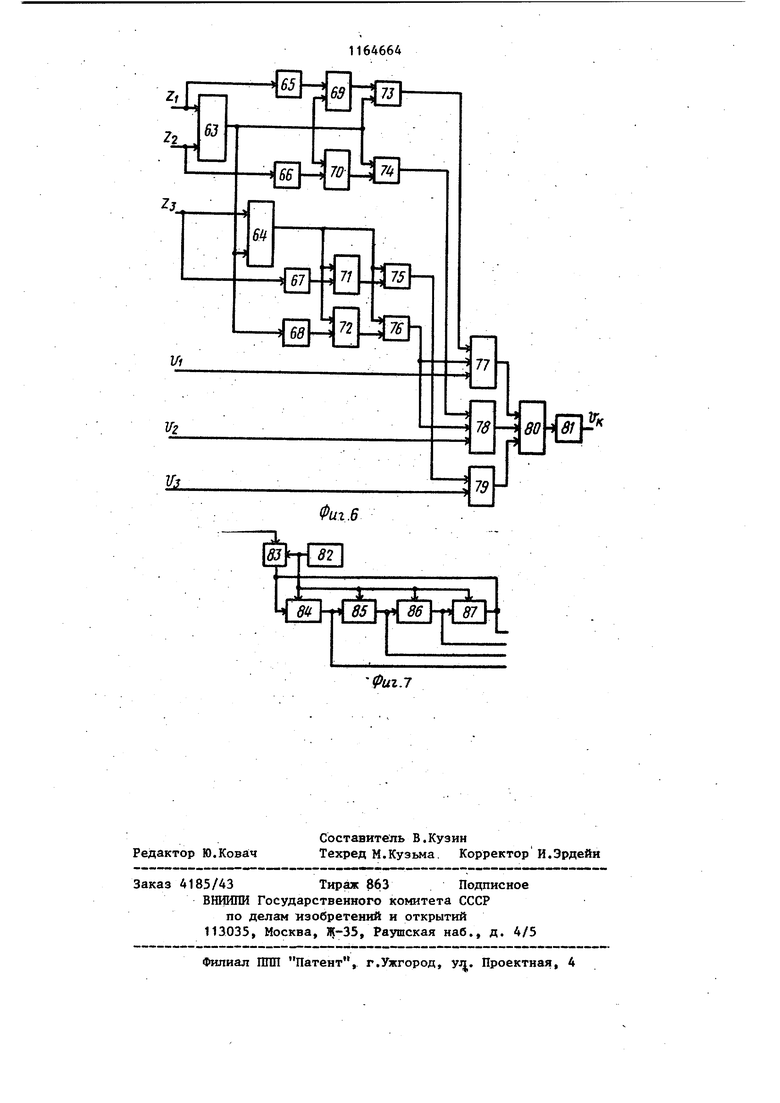
1 Изобретение относится к автомати ке и может быть использовано при уп равлении динамическими объектами. Цель изобретения - повышение точ ности регулятора путем учета возмущений, действующих на объект управл ния не только к моменту начала инте вала решения задачи выбора управляю щего воздействия в виде начальных условий с объекта, но и тех возмуще ний, которые действуют на объект управления в течение решения задачи выбора управляющего воздействия. На фиг. 1 изображена структурная схема регулятора; на фиг. 2-7 - соответственно блок задания начальных условий, модель объекта управления, модель регулятора, блок вычисления критерия оптимаЛьности, логический блок, блок синхронизации. Квазиоптимальный регулятор (фиг. 1) состоит из объекта 1 регулирования, блока 2 задания начальньпс условий, моделей 3 объекта, моделей 4 регулятора, блоков 5 вычисления критерия оптимальности, логического блока 6, блока 7.синхронизации, источников 8 постоянного нап ряжения, ключевого элемента 9, вторых 10 и первых 11 ключей, задатчика 12 выходной величины, сумматоров 13, блоков 14 вычитания, блока 1 умножения .на два,инверторов 16,третьи ключей 17 и первого 18 и второго 19 инверсных ключей (отличие инверсного ключа от обычного заключается в том, что при подаче сигнала с бло ка синхронизации на обычный ключ, он замыкается, а инверсный размыкается) . Блок задания начальных условий (фиг. 2) имеет три (в случае трехмерной размерности вектора фазовых координат) параллельно соединенных регистра 20-22 с потенциальными выходами. Модель объекта управления (фиг, 3) для объекта второго порядка включает в себя операционные уси лители 23 и 24, имеющие дополнитель ные входы для записи начальных условий Хд и основные входы V , логические элементй И-НЕ 25 и 26, логические элементы И 27 я 28, конденсаторы 29 и 30 и активные сопротивления 31-33. : Один из вариантов модели регулятора в случае трехмерного вектора 642 фазовых координат представлен на фиг. 4. Она имеет два общих входа Х и У , выход , и включает в себя инверторы 34-36, сумматоры 37-39; блоки 40-42 умножения на постоянную величину и сумматоры 43 и 44, Блок вычитания среднеквадратичного критерия оптимальности (фиг.5) для трехмерного вектора координат имеет два общих входа X и I, общий выход Z и состоит из логических элементов И-НЕ , инверторов 51-53j сумматоров 54-56, блоков 57-59 умножения, сумматоров 60 и 61 и интегратора 62. Логический блок в случае трехканального регулятора представлен на фиг, 6. Он имеет две группы общих входов 2, Zj,, , V,,, V, общий выход V| и состоит из компараторов 63 и 64, настроенных на выделение минимального из двух сравниваемых сигналов, инвертора 65-68, сумматоров 69-72, логических элементов И-НЕ 73-76, логических элементов И 77-79, логического элемента ИЛИ 80 и выходного регистра 81 . Блок синхронизации (фиг, 7), содержащийся в квазиоптимальном регуляторе и служащий для выдачи команд на соответствующие ключи в определрнные моменты времени, можетработать по жесткой программе и состоять из источника 82 постоянного напряжения, ключа 83, ждущих блокинг-генераторов 84-87, выход предыдущего из них идет на запуск последукхцего. Ква.зиоптимальный регулятор работает сл.едующим образом. В начальный момент времени при появлении сигнала рассогласования с выхода объекта управления запускается блок синхронизации и вьщает сигнал на первьй выход, при этом ключевой элемейт 9 замыкается, все ключи разомкнуты, тем самым сигнал, соответствующий начальным условиям, проходя через блок 15 и увеличиваясь в два раза поступает на вход мидели 3. После задания начальньк условий блок 7 синхронизации выдает сигнал на ключ 10 и снимает сигналы с ключевого элемента 9 и ключей 18 и 19. При этом ключевой элемент 9 размыкается, а инверсные .ключи 18 и 19 замыкаются. После замыкания ключа 10 сигнал V с бло ка 8 постоянного напряжения через инвертор 16 поступает на сумматор t где складывается с сигналом управления, поданным в данный момент на объект-1 управления. С сумматора 13 сигнал управления поступает на вход модели 3. Модель 3 переход в режим решения. Выходной сигнал с модели в блоке 14 вычитания постоянно сравнивается с выходным сиг лом объекта 1 управления, который проходит через открытый ключ 18, По истечении заданного времени, ко тороё выбирается в зависимости от необходимого времени прогноза фазо вых координат, ключ 11 замыкается, в замкнутом состоянии остаются инверсные ключи 18 и 19, остальные ключи разомкнуты, на вход модели 3 объекта через модель 4 регулятора поступает сигнал, равный разности сигналов с выхода модели и объекта управления, на другой вход модели регулятора поступает сигнал, соответствующий желаемому значению вы ходной величины. Все это время, начиная от начала прогноза до конц переходного процесса в модели 3 объекта, замкнутой моделью регулятора блоки 5 вычисления критерия оптимальности вырабатьгоают сигналы соответствующие значению функциона ла от фазовых координат, который учитьшает действие возмущений на объект управления в период выбора управляющего воздействия, за счет того, что в блоке 14 вычитания происходит сравнение сигналов с вы хода объекта 1 и выхода модели, пр условии, что на модель 3 подается сигнал управления, представляющий собой сумму прогнозируемого сигнал управления и сигнала, поданного в данньй момент на объект -1 управления. Функционалом может быть среднеквадратичный показатель каче ства от рассогласования текущих . координат процесса и желаемых, поступающих:с задатчика 12 выходно величины в блок 5 вычисления критерия оптимальности. По истечении среднего времени переходного процесса сигнал с четвертого выхода блока 7 синхронизации замыкает ключ 17 и подает блокирующий сигна в блок 5 вычисления критерия оптинальности, при этом инверсные ключи 18 и 19 находятся в замкнутом состоянии, а ключи 10 и 11 - в разомкнутом состоянии. Через открытый ключ 17 сигнал с блока 5 вычисления критерия оптимальности поступает на вход логического блока 6, куда подаются также сигналы с источ- , НИКОВ 8 постоянного напряжения и блоков вычисления критерия оптимальности всех имекидихся каналов квазиоптимального регулятора. В логическом блоке 6 происходит выбор управляющего воздействия, соответствующего минимальному значению фун|сционала. В модели объекта управления после , открьпия ключа 10 по сигналу с блока. синхронизации квазиоптимального регулятора на ее вход поступает сигнал V.J , который закрьгаает логические злементы И 27 и 28. При зтом усилители с заданными начальными условиями, предварительно охваченные обратными связями через активные сопротивления 31 .и 32, становятся охваченными емкостными обратными связями и начинают интегрировать входные сигналы. Так модель переходит в режим решения. По мере решения задачи прогноза выходные параметры модели снимаются с выходов интеграторов. В модели регулятора составляющие сигнала У проходят через инверторы34-36 и суммируются в сумматорах 37-39 с соответствующими составляющими сигнала Х,. Сигналы на выходах сумматоров, проходя через блоки умножения на постоянную величину, выбранн.ую заранее для каждого и жестко зафиксированную в нем, суммируются. В блоке вычисления критерия оптимальности при поступлении на его вход сигналов У их. составля4ощие проходят через соответствующие логические элементы И-НЕ, далее составляющие сигнала Х,, проходят через инверторы и суммируются с составляющими YY . Затем полученные составляющие в блоках умножения возводятся в кв11Драт, эти результирующие сигналы суммируются и ббщий результирующий сигнал поступает на интегратор. С целью обеспечения точности работы блока вычисления критерия оптимальности до начала прог5
ноза в моделях 3 объекта ключи 18 и 19 закрывают вход этого блока. Затем, когда переходные процессы в моделях 3 прекращаются по сигналу I с четвертого выхода блока 7 синхронизации, закрываются логические элементы И-НЕ, а на интегратор 62 поступает сигнал для списывания информации и приведения его в исходное положение.
В логический блок на его входы поступают прогнозируемые сигналы управления V, V.. , V и соответствующие им полученные в блоках вычисления критерия оптимальности значения функционалов Z , Z, , Z . Задачей логического блока является выбор и подача на вход управляющего воздействия, соответствующего минимальному значению функционала, полученного при анализе движения модели объекта под действием этого управляющего воздействия. Для этого сигналы Z и Zj проходят .через компаратор,настроенньй на вьщеление минимального сигнала, а также подаются через инвер торы 65 и 66 на входы сумматоров 69 и 70, где складываются с минимальным из двух сигналов Z или Z,, , который снимается с компаратора 63. В итоге на выходе одного из сумматоров обязательно должен получиться ноль, а на другом каком-то сигнал. На вторые входы логических элементов И-НЕ 73 и 74 подан минимальный из двух сигналой Z или L с Компат ратора 63, на одном из логических
646646
элементов, на вход которого поступил нулевой сигнал, будет выходной сигнал, а на другом логическом элементе, куда пришли оба нулевых сигнала,, 5 выходной сигнал будет нулевым. Вход логического элемента 73, соответствующего значению функционала по управлению V, , поступает на один из входов логического элемента И, на
О вход которого поступает первый
прогнозируемый сигнал V . Выход логического элемента 74, соответствующего значению функционала по управлению V , поступает на один из вхо5 доз логического элемента И 78, на другой вход которого поступает второй прогнозируемый сигнал Vj. По этому же принципу сравниваются сигналы Z и минимальный из Z и Z,
0 затем устанавливается с помощью логических схем 77-79 однозначное соответствие минимального значения функционала и его управления. Выбранный сигнал управления, проходя
5 через логический элемент ИЛИ 80, запоминается в регистре 81 с потеницальным вь1ходом.
С выхода логического элемента 0 сигнал управления, выбранный в данном цикле решения задачи прогноза, поступает на вход объекта управления, стремясь свести к нулю возникшее рассогласование с более высокой степенью точности. В дальнейшем цикл работы квазиоптймального регулятора повторяется.
38
33
5ц
fi
4k
Фиг Л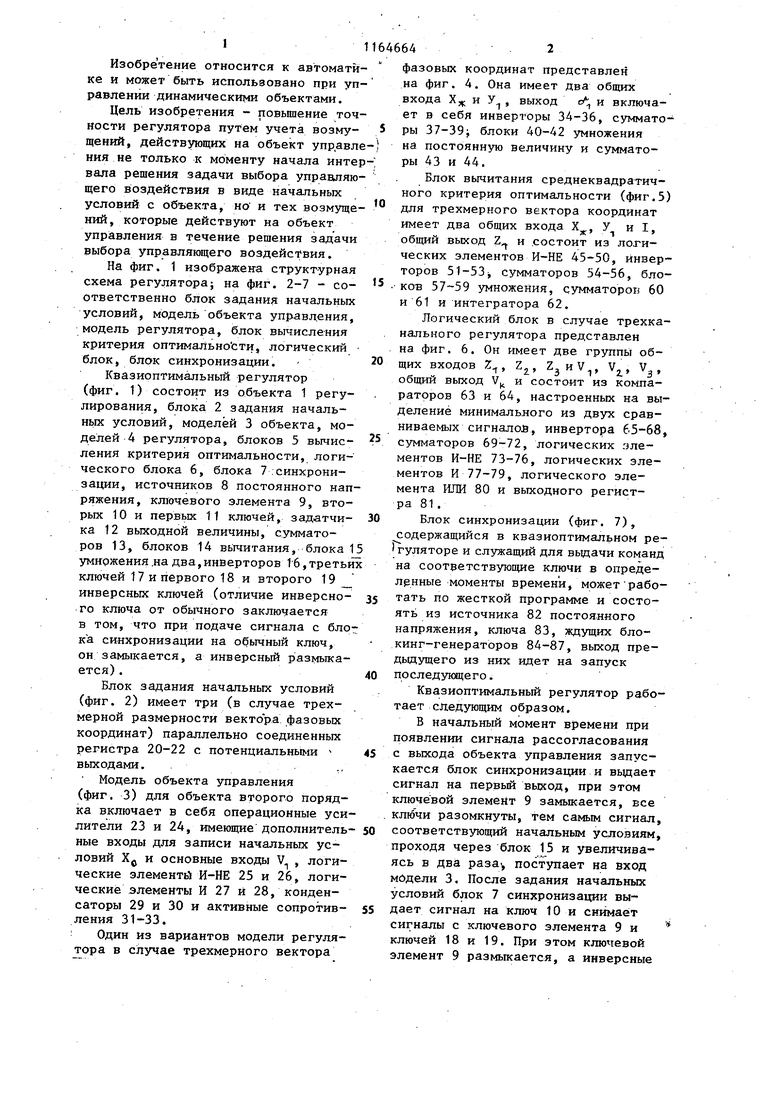
| название | год | авторы | номер документа |
|---|---|---|---|
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2013 |
|
RU2541848C1 |
| Устройство управления инерционным объектом | 1988 |
|
SU1755262A1 |
| Квазиоптимальный регулятор | 1976 |
|
SU646308A1 |
| СТАБИЛИЗИРОВАННЫЙ ЭЛЕКТРОПРИВОД | 2016 |
|
RU2621288C1 |
| Устройство для управления технологическими процессами нефтепереработки | 1986 |
|
SU1392544A1 |
| Устройство для регулирования силовых параметров и рабочей подачи процесса резания | 1985 |
|
SU1270744A1 |
| Адаптивная система управления | 1984 |
|
SU1179268A1 |
| ИНЕРЦИАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 1988 |
|
RU2083954C1 |
| Тренажер крановщика поворотного крана | 1978 |
|
SU743014A1 |
| Устройство для интегрирования | 1983 |
|
SU1108470A1 |
КВАЗИОПТИМАЛЬНЬЙ РЕГУЛЯТОР, содержащий блок задания, логический, блок, блок синхронизации, последовательно соединенные блок задания на-.. чальных условий, подключенньш выходом к входу ключевого элемента, и N каналов, каждый из которых имеет -источник постоянного напряжения, блок вычисления критерия оптимальности и; последовательно соединенньш модель . регулятора, первый ключ и модель объекта, подключенная входом к выходу второго ключа, первый, второй и третий выходы блока синхронизации соединены соответственно с управляющим входом ключевого элемента, управляющими входами первых ключей. и управляющими входами вторых ключей, отличающийся тем, что, с целью повышения точности, , он содержит первый и второй инвёрс- , ные ключи, блок умножения на два, а в каждом из N каналов - блок вычитания, третий ключ и последовательно соединенные инвертор и сумматор, подключенный выходом к входу второго ключа, вход инвертора соединен с выводом источника постоянного напряжения, выход модели объекта соединен с первым входом блока вычитания, подключенного, выходом к первому входу блока вычисления критерия оптимальности и первому входу модели регулятора, выход первого инверсного ключа соединен с вторыми, входами, блоков вычитания, выход логического блока подключен к вторымвходам сумматоров, выходы блоков вычисления критерия оптимальности через третьи ключи соединены с первыми входами логического блока,вторые.. входы которого подключены к выходам источников постоянного напряжения, выход блока задания начальных условий через второй инверсный ключ соединен с вторыми входами моделей регулятора и вторыми входами блока Од 4 Од вычисления критерия оптимальности, первьй выход блока синхронизации соединен с управляющими входами.первого и второго инверсных ключей, о: четвертый выход блока синхронизации 4 соединен с третьими входами блоков вычисления критерия оптимальности и управляющими входами третьих ключей, вход блока задания начальных условий подключен к.входам первого инверсного ключа и блока синхронизации, выход ключевого элемента через блок умножения на два соединен с управляющими входами моделей объекта.
1 Хж У /
| Александровский П.М | |||
| Элементы теории оптимальных систем автоматического управления | |||
| М., Наука, 1969, с | |||
| Кровля из глиняных обожженных плит с арматурой из проволочной сетки | 1921 |
|
SU120A1 |
| Труды .fЭИ,M., т | |||
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
| Машина для разделения сыпучих материалов и размещения их в приемники | 0 |
|
SU82A1 |
| , Авторское свидетельство СССР № 646308, кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
