сл
С
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для решения задач оптимального управления | 1985 |
|
SU1270779A1 |
| Устройство для решения задач оптимального управления | 1985 |
|
SU1327135A1 |
| Устройство управления нагревом | 1988 |
|
SU1578698A1 |
| Адаптивная система управления | 1987 |
|
SU1464139A1 |
| Аналого-цифровое вычислительное устройство | 1988 |
|
SU1501103A1 |
| Устройство для моделирования дифференциальных уравнений | 1989 |
|
SU1727130A1 |
| Аналого-цифровой преобразователь интегральных характеристик напряжений | 1988 |
|
SU1615888A1 |
| Анализатор сигнала тактовой синхронизации | 1988 |
|
SU1587656A1 |
| Устройство для моделирования нестационарных электромагнитных полей | 1989 |
|
SU1689904A1 |
| Аналого-цифровой преобразователь действующего значения напряжения | 1987 |
|
SU1585898A1 |
Изобретение предназначено для работы в системе управления нагревом, может оыть использовано в металлургии и химической промышленности.
Известно устройство, содержащее блок задания начальных условий, соединенный через первый ключ с моделями объекта, входы которых соединены через вторые ключи с соответствующими источниками постоянного напряжения, а выходы через блоки вычисления критерия оптимальности соединены с объектом, и блок синхронизации, соединенные первым и вторым ключами„
Недостатком устройства является недостаточная точность упрлеления нагревом.
Наиболее близким к изобретению по технической сущности является квазиоптимальный регулятор,содержащий блок задания начальных условий, соединенный через первый ключ с моделями объекта, входы которых соединены через вторым ключи с соответствующими источниками постоянного напряжения, а выходы .через блоки вычисления критерия оптимальности соединены с логическим блоком, выход которого соединен с объектом, блок синхронизации, соединенный с первым и вторым ключами, третий ключ, вход каждой модели объекта соединен через третий ключ с выходом модели регулятора, один вход которого соединен с выходом модели объекта,
Х|
СЛ
,л
ю о
ND
а второй вход соединен с задатчиком выходной величины объекта, а один из выходов Ьлока синхронизации соед ней с одним из входов третьего ключа,
Недостатком известного кваэиоп- тимального регулятора является недостаточная точность управления.
Цель изобретения - повышение точности управления.
Это достигается за счет включени в устройство блока формирования управляющих воздействий, блока задания состояния объекта, вход которого подключен к выходу Цикл блока синхронизации и к первому управляющему входу блока формирования управляющих воздействий, а выход - к второму информационному входу блока формирования управляющих воздействий, первый информационный вход которого подключен к выходу модели объекта управления, а первый и второй выходы подключены соответственно к входу объекта управления и к первому информационному входу модели объекта управления, а второй, третий, четвертый управляющие входы подключены соответственно к выходу Пуск блока синхронизации и к первому управляющему входу модели объекта управления, к выходу Останов блока синхронизации и к второму управляющему входу модели объекта управления, к выходу Сброс блока синхронизации, выход Исходное положение которого подключен к третьему управляющему входу модели объекта управления, второ информационный вход которой подключен к выходу объекта управления, а четвертый и пятый управляющие входы - соответственно к выходам Запись начальных условий объекта и Запись начальных условий модели объекта управления блока синхронизации.
Объект управления описывается системой обыкновенных дифференциальных управлений х,а и ( +а,2 (xj- xЈ + -кчэ (х)- х +Ъ, (эф «и4 х2«аг, (х J -xt +а2г- х +агз х3 И) з, (х,)- х +aJ2.x +аээ-х где х, х-г., хэ - выходы объекта управления, определяющие его состояние;
7552624
| а( ( oUiha U,;, а-Э( переменные коэффициенты
уравнений И);
5 а2г агз азг азз постоянные коэффициенты уравнений
(1),
U - управляющее воздействие.
10 Модель объекта управления () адекватна объекту управления. На величину управляющего воздействия наложено ограничение
J5 Оё IU имакс
Управляющее воздействие определяется следующим образом.
Предположим что известно значение управляющего воздействия
20 U(cj), действующее на интервале управления (t;,tl4,),i 0,1,2,... Необходимо определить значение управляющего воздействия U(t,.,.,) для интервала управления (tJt1,).
25 Уравнения модели объекта управления (1j решаются для интервала управления (tj, t,- + l) при U(t;) и начальных условиях xkMKa4 xK(t; ) , Тс 1,2,3, определяемых состоянием
30 объекта управления в момент времени . Решение уравнений модели объекта управления прогнозирует состояние объекта управления на момент времени . Затем уравнения модели
35 объекта управления решаются для интервала управления (t ,t j.2) при
U(tj+( ) 2имсиси начальных ус40 ловиях
Решение уравнений (1) прогнозирует состояние объекта управления на момент времени , +z при U (t;,)
тт 45 я 2и/мако Точность управления оценивается ошибкой управления
Е(Па;+2 х А,чг)-х% (t,4f)i
где заданное значение
выхода объекта управления при
.0)
142
х 2м 2 Решение дифференциальных уравнений, модели объекта управления на интер-,1 вале управления
U,4, , i-той
-z
Если Е
и)
) при итерации поиска управления ()bO, то k приUz
нимается равным 1, если Е(1(си)с
СО, то kul 0.
Затем решение уравнений модели объекта управления для интервала управления (с ;4.| , с «+2) повторяется при тех же начальных условиях
Хк/инач хкл с1-м) и Управляющем воз- действчи
U(t,,) - (k l+kWl)lWc,
k 1
Точность управления оценивается ошибкой управления
EWl(t 4 kr w(Cl «)-x(# (c-t
Если tuMt,VzJ-° то kU прини- мается равным 1, если Е (2(сj.,)0, то k(2 Оо
Количество итераций при поиске управляющего воздействия для интервала управления (с ;+1 , tfu) onpe- деляется разрядностью цифроанало го- вого преобразователя (ЦАП) п.
3 общем виде 1-итерация i 1 1,2,.. управляющего воздействия для интервала времени U ;+, ся выражением (6)
, с ;+2 ) определяет
h
U
ч+() -z
(рЦ
2е
1 MUKC
1 при
Е (е (с
г
)
(е) - Е ингКО
О при
Разрядность ЦАП выбирается из условия обеспечения точности управления, чаще всего не более 10 разрядов, „,„«,.
п
2 менее
макс
1°82
MQKC
где х , 1JlfIlfcv- максимальное значение х г выходной координаты объекта управления; максимальное допустимое значение ошибки управления .,
Найденное значение управляющего воздействия ,) для интервала управления (с;,, с;+г) в момент времени ;+1 подается на объект
управления. Затем начинается процесс поиска управляющего воздействия для интервала управления (ц„, tj,,,) и т.д.
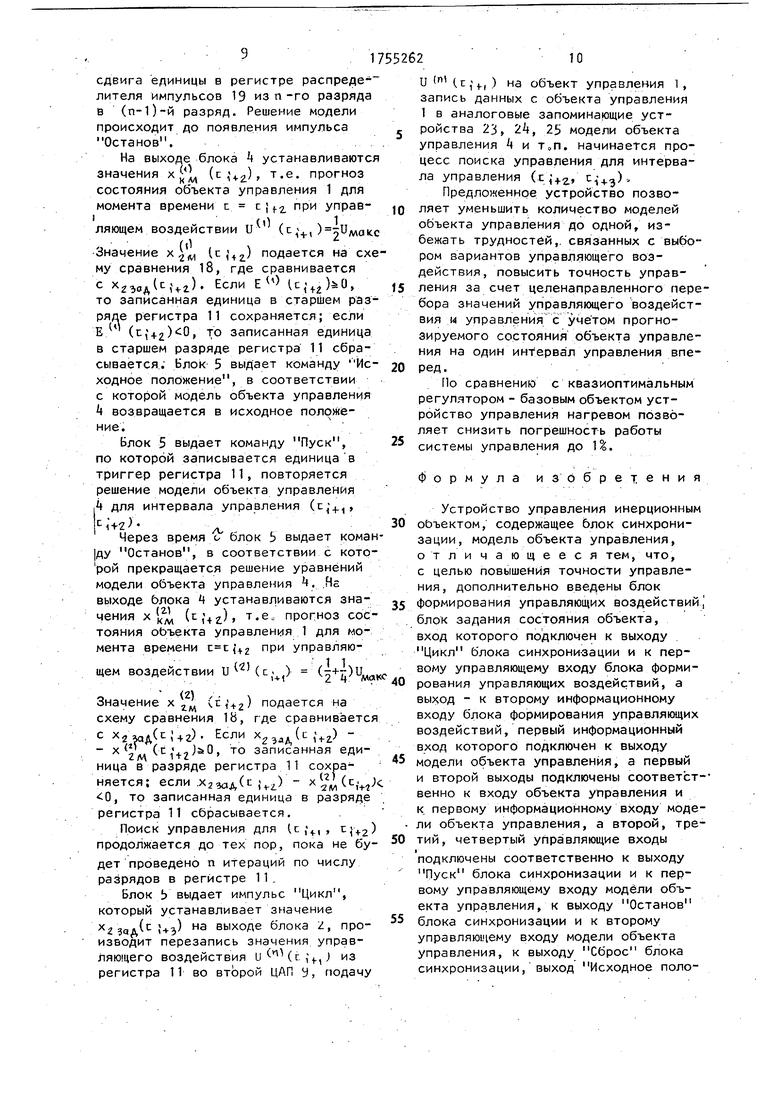
На фиг.1 приведена блок-схема устройства управления нагревом (1 - объект управления, 2 - блок задания состояния объекта, 3 - блок формирог
0
5
0
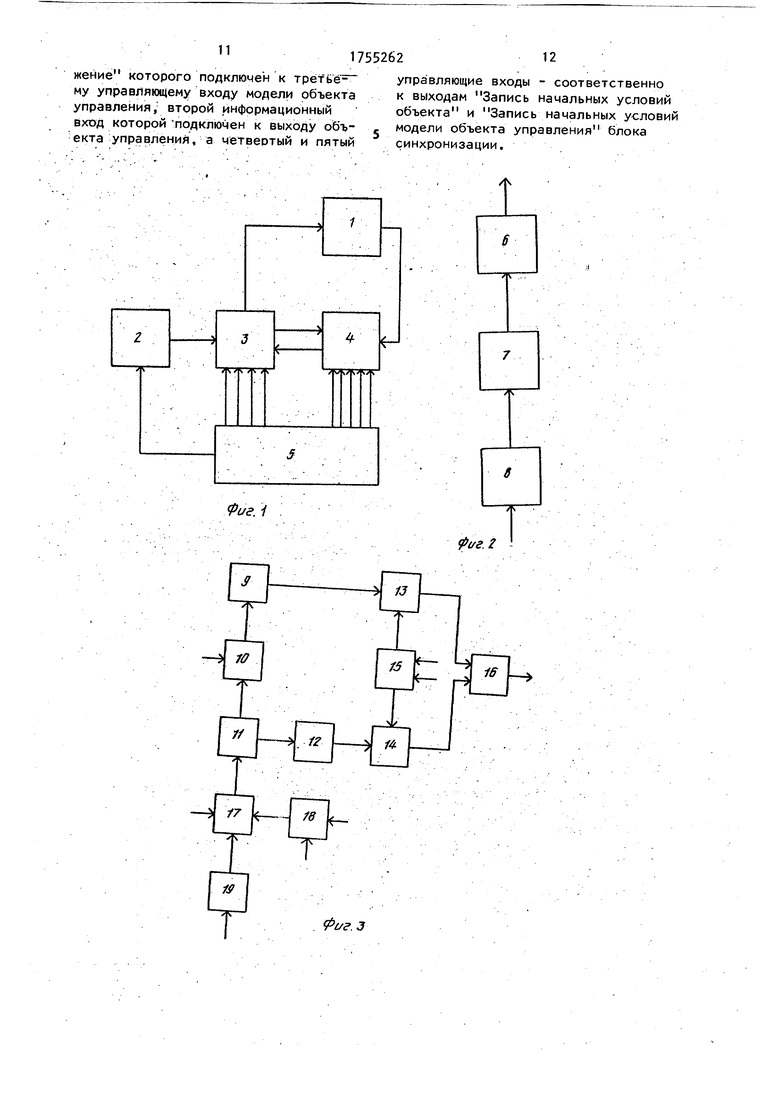
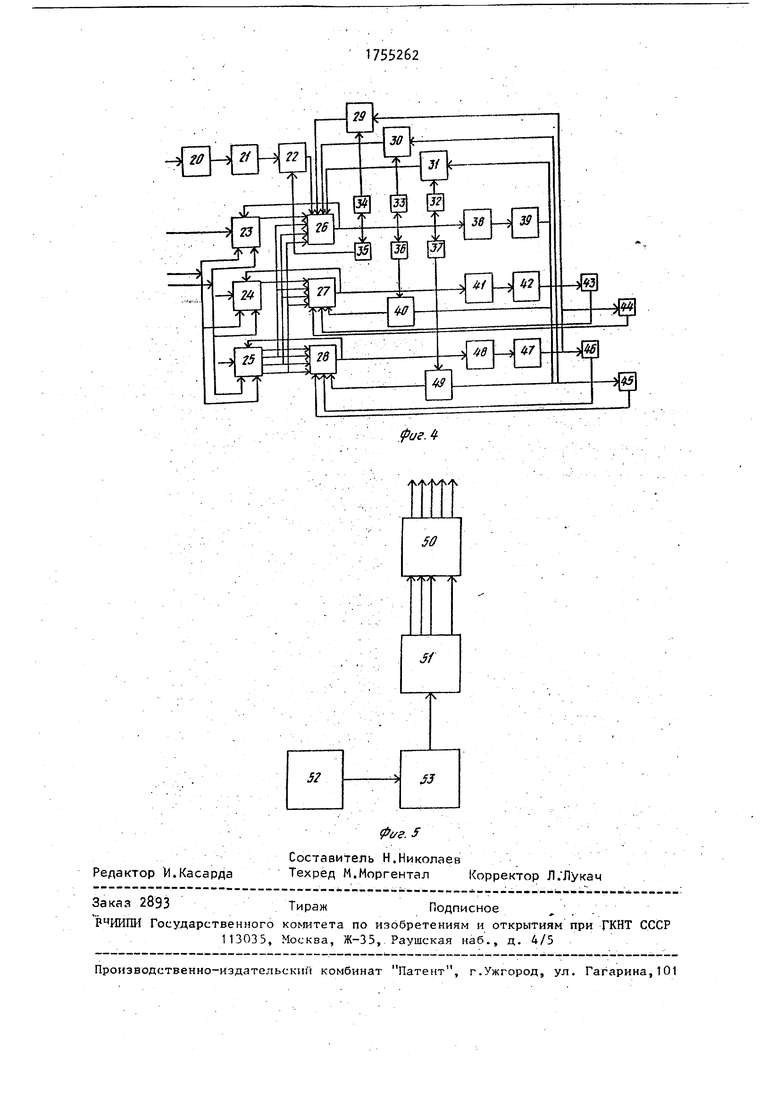
вания управляющих воздействий, 4 - модель объекта управления, 5 - блок синхронизации); на фиг.2 - блок-схе- ма блока задания состояния объекта (6 - блок нелинейный, 7 - первый, цифро-аналоговый преобразователь (ЦАП), 8 - счетчик импульсов); на фиг.З - блок-схема блока формироваg ния управляющих воздействий (9 - второй ЦАП, 11) - блок-схема записи в ЦАП, 11 - регистр , 12 - преобразователь код-ток, 13 первый электронный ключ, 14 - второй электрон5 ный ключ, 15 - триггер, 16 - усилитель, 1/ - блок-схема записи в регистр, 18 - блок-схема сравнения, 19 - блок распределения импульсов); на фиг.А - блок-схема модели объекта управления (2U - диод, 21 - первый квадратор, 22 - первый блок умножения, 23 - первый блок аналогового запоминающего устройства (АЗУ), 24 - второй блок аналогового запоминающего устройства, 25 - третий блок аналогового запоминающего устройства, 26 - первый интегратор, 27 - второй интегратор, 28 - третий интегратор, 29 - второй блок умножения, 30 - третий блок умножения, 31 - четвертый блок умножения, 32, 33,34,35,36,37 - первый, второй, третий, четвертый, пятый, восьмой коэффициенты модели объекта управление, 33 - второй квадратор, 39 третий квадратор, 40 - пятый блок умножения, 41 - четвертый квадратор, 42 - пятый квадратор, 43 - шестой коэффициент модели объекта
0 управления, 44 - седьмой коэффициент модели объекта управления, 4Ь - девятый коэффициент модели объекта управления, 46 - десятый коэффициент модели объекта управления, 47 - шес5 той квадратор, 48 - седьмой квадратор, 49 - шестой блок умножения); на фиг.5 - блок-схема блока синхронизации (ЬО - дешифратор команд, 51 - счетчик импульсов, 52 - генера0 тор импульсов, 53 формирователь длительности времени цикла).
Блок задания состояния объекта 2 предназначен для генерирования заданного состояния объекта управ5 ления. Блок формирования управляющих воздействий 3 предназначен для определения управляющих воздействий,( Модель объекта управления k пред5
назначена для прогнозирования состояния оЬъекта управления. Блок синхронизации 5 предназначен для синхронизации работы всех блоков устройства путем выдачи команд. Блок синхронизации 5 подает следующие команды: по первому выходу блока 5 на вход блока 2 и на первый вход блока 3 проходит команда по второму выходу блока 5 на второй вход блока 3 проходит команда Сброс ; по третьему выходу блока 5 на третий вход блока 3 и на второй вход блока 4 проходит команда по четвертому выходу блока 5 на четвертый вход блока
3и на первый вход блока 4 проходит команда Останов ; по пятому выходу блока 5 на третий вход блока
4проходит команда Исходное положение ; по шестому выходу блока 5 н четвертый вход блока 4 проходит команда Запись начальных условий объекта ; по седьмому выходу блока
5на пятый вход блока 4 проходит команда Запись начальных условий модели объекта управления.
Устройство работает следующим образом.
Блок синхронизации 5 обеспечивае формирование импульсов - команд в определенной временной послепова- тельности в течение цикла .
В момент времени cj блок синхро- низации 5 вырабатывает импульс Цикл, который переписывает код из регистра 11 в ЦАП 9, устанавливает значение х2зад (с i4z) на ВЬ1Х°Де блока задания состояния объекта 2. Сигнал управления (t ) поступает с выхода ЦАП 9 на вход объекта управления 1, а (с +г) на второй информационный вход блока 3.
Импульс Цикл устанавливает триггер 15 блока 3 в единичное состояние, разрешающий сигнал с триггера 15 поступает на первый электронный ключ 13 и открывает его для прохождения (c;) на усилитель 16, на втором выходе блока 3 устанавливается напряжение и (с ;). Одновременно с импульсом Цикл формируется сигнал Запись начальных условий объекта Ч 8 результате действия этого сигнала в АЗУ 23, 24, 25 блока 4 запишутся значения хк(с;) и;следовательно, начальные условия на интеграторах 26, 27, 28
Блок синхронизации 5 выдает команду Пуск, по которой запускаетс модель объекта управления 4„ Модель объекта Ц решается при начальных условиях, определяемых состоянием объекта управления 1 в момент времени , xkMHQ4 xk(c;) и управления U (с j), п 10.
Решение уравнений модели объекта (4) определяет состояние объекта управления 1 для момент времени . Решение модели объекта управления в блоке 4 длится с , где Ј Ас/1+ г, , п- разрядность ЦАП.
Через Ј с после импульса Пуск появляется импульс Останов, в результате действия которого останавливается решение уравнений модели объекта 4, триггер 15 устанавливается в нулевое состояние, обеспечивая тем самым закрытие ключа 13, открытие ключа 14 и прохождение сигнала с выхода преобразователя 12 на вход усилителя 160
После останова формируется импульс Запись начальных условий модели объекта управления, в соответствии с которым данные с выхода блоков 26,27,28.xlcM(t;.f,) записываются соответственно в первый, второй,третий блоки АЗУ 23, 24, 25.
Затем блок 5 выдает импульс :. Исходное положение, в соответствии с которым интеграторы 26, 27, 28 блока 4 возвращаются в исходное состояние с начальными условиями
xkw iVi
Ьлок 5 формирует импульс Сброс
который обеспечивает обнуление регистра 11, установку распределителя импульсов 19 в исходное состояние. На выходе усилителя 16 устанавливается сигнал U (с .+ |) - |UMQKC,
После импульса Сброс устройство управления вновь готово к поиску итераций управления для интервала
управления (с
1+с сi + г
).
При поиске управления для интервала управления (с;+1, с;+г) импульсы Сброс, Запись начальных услов модели объекта управления, Запись начальных условий объекта блоком 5 не формируются.
Блок 5 выдает команду Пуск, запускает интеграторы 26, 27, 28 блока 4 и подготавливает цепь для
сдвига единицы в регистре распределителя импульсов 19 изп-го разряда в (п-1)-й разряд. Решение модели происходит до появления импульса Останов,
На выходе блока устанавливаютс значения х (с), т.е. прогноз состояния объекта управления 1 для момента времени t c;fz при управ(0 (г. l, 21
ляющем воздействии U
(О
(с 44.1 )oUMait
ч-и
Значение xi-. (cj.z) подается на сх
му сравнения 18, где сравнивается
С гэад(с,42.) Если Е О) Uiu)0,
то записанная единица в старшем разряде регистра 11 сохраняется; если Е (А (с, 42)0 Т° записанная единица в старшем разряде регистра 11 сбрасывается; Блок 5 выдает команду Исходное положение, в соответствии с которой модель объекта управления k возвращается в исходное положение.
Блок 5 выдает команду Пуск, по которой записывается единица в триггер регистра 11, повторяется решение модели объекта управления k для интервала управления (сн + 1
д.
Через время с/ блок Ь выдает комаду Останов, в соответствии с кото рой прекращается решение уравнений модели объекта управления . На выходе блока Ц устанавливаются значения х j (t, +z.) т.е. прогноз состояния объекта управления 1 для момента времени при управляющем воздействии UWJ(c.+1) (Чда (2)
гм i + г) подается на
Значение х
схему сравнения 1Ь, где сравниваетс
с Х2 задние)- Если - х (t jJstO, то записанная единица в разряде регистра 11 сохраняется; если ХгзадСччР - 0, то записанная единица в разряде регистра 11 сбрасывается.
Поиск управления для (с ;f,, cj+2 продолжается до тех пор, пока не будет проведено п итераций по числу разрядов в регистре 11.
Блок Ь выдает импульс Цикл, который устанавливает значение х2За.(с ;+3) на выходе блока 2, производит перезапись значения управляющего воздействия U (t ;f,,) из регистра 11 во второй ЦАП У, подачу
5
0
5
U (nl (с , fl ) на объект управления 1, запись данных с объекта управления 1 в аналоговые запоминающие устройства 23, 24, 25 модели объекта управления 4 и трп. начинается процесс поиска управления для интервала управления (, ),
Предложенное устройство позволяет уменьшить количество моделей объекта управления до одной, избежать трудностей, связанных с выбором вариантов управляющего воздействия, повысить точность управления за счет целенаправленного перебора значений управляющего воздействия и управления с учетом прогнозируемого состояния объекта управления на один интервал управления вперед.
По сравнению с квазиоптимальным регулятором - базовым объектом устройство управления нагревом позволяет снизить погрешность работы системы управления до 1%.
Формула изобретения
Устройство управления инерционным
объектом, содержащее блок синхронизации, модель объекта управления, отличающееся тем, что, с целью повышения точности управления, дополнительно введены блок
формирования управляющих воздействий, блок задания состояния объекта, вход которого подключен к выходу Цикл блока синхронизации и к первому управляющему входу блока формирования управляющих воздействий, а выход - к второму информационному входу блока формирования управляющих воздействий, первый информационный вход которого подключен к выходу
модели объекта управления, а первый и второй выходы подключены соответст- венно к входу объекта управления и к первому информационному входу моде- ли объекта управления, а второй, третий, четвертый управляющие входы
подключены соответственно к выходу Пуск блока синхронизации и к первому управляющему входу модели объекта управления, к выходу Останов блока синхронизации и к второму управляющему входу модели объекта управления, к выходу Сброс блока синхронизации, выход Исходное положение которого подключен к третье му управляющему входу модели объекта управления, второй информационный вход которой подключен к выходу объекта управления, а четвертый и пятый
10
//
7
/7
/
«-
Т
Риг 3
управляющие входы - соответственно к выходам Запись начальных условий объекта и Запись начальных условий модели объекта управления блока синхронизации.
/J
Ч Э
1S
141
