Изобретение относится к машиностроению и может быть использовано при обработке изделий со сложной конфигурацией.
Известен способ копирования на металлорежущих станках, заключающийся в том, что копировальный наконечник следящего устройства приводят во взаимодействие с копируемой поверхностью и по сигналам следящего устройства управляют с заданной контурной скоростью движением наконечника относительно копируемой поверхности. Способ осуществляют копировальным устройством, содержащим копировальный наконечник 1.
Известный способ обладает недостаточно высокими точностью и надежностью, так как между положениями копировального наконечника и инструмента возникает рассогласование.
Исполнение режущим инструментом перемещения, соответствующего этому рассогласованию, занимает некоторый промежуток времени. Длительность этого промежутка зависит от типа и структуры следящей системы станка. Кроме того, наличие контактов в копировальном устройстве снижает его надежность.
Цель изобретения - повышение точности и надежности копирования.
Поставленная цель достигается тем, что согласно способу копирования на металлорежущих станках, заключающемуся во взаимодействии наконечника следящего устройства с копируемой поверхностью и в управлении по сигналам следящего устройства движением наконечника относительно копируемой поверхности, определяют текущее направление силы взаимодействия наконечника с копируемой поверхностью, находят положение точки их контакта и касательную к копируемой поверхности, в этой точке и задают скорость движения точки контакта по касательной.
Устройство, содержащее следящее устройство с наконечником, снабжено блоком расчета направления действия силы и датчиком направления действия силы, установленным между наконечником и блоком расчета направления действия, выполненным в виде двух фланцев, соединенных, при помощи сферических щарниров шестью стержнями с измерительными преобразователями силы, выходы которых соединены с блоком расчета направления действия силы.
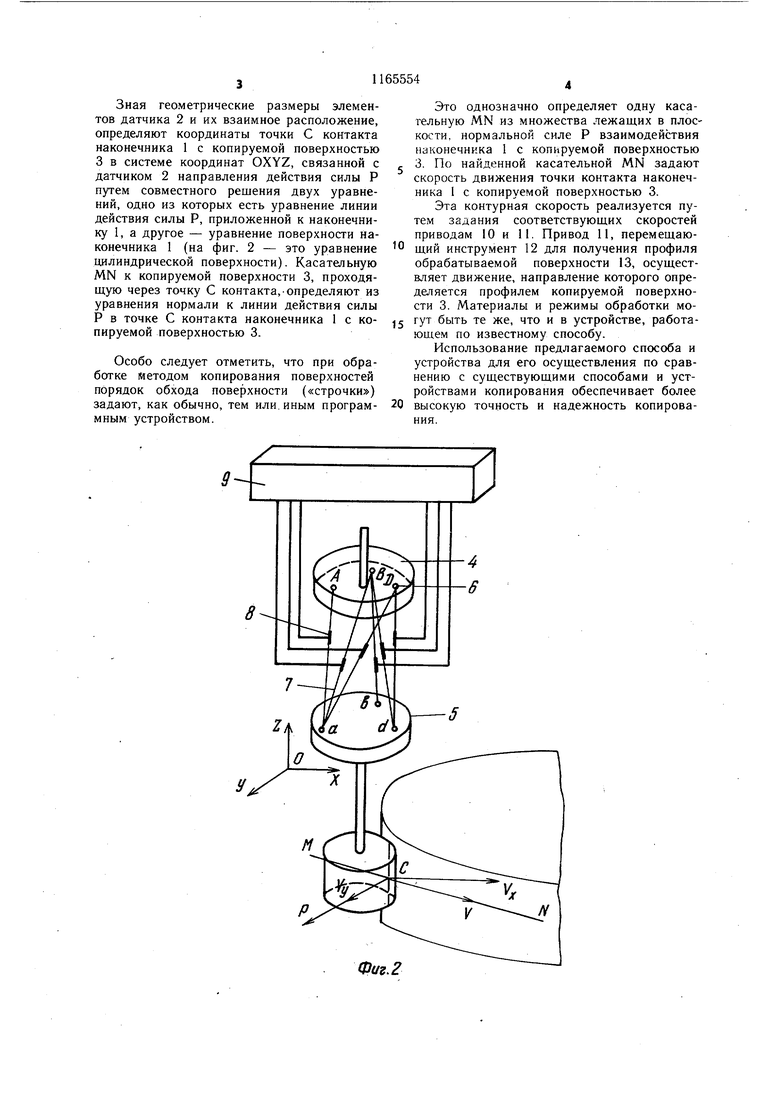
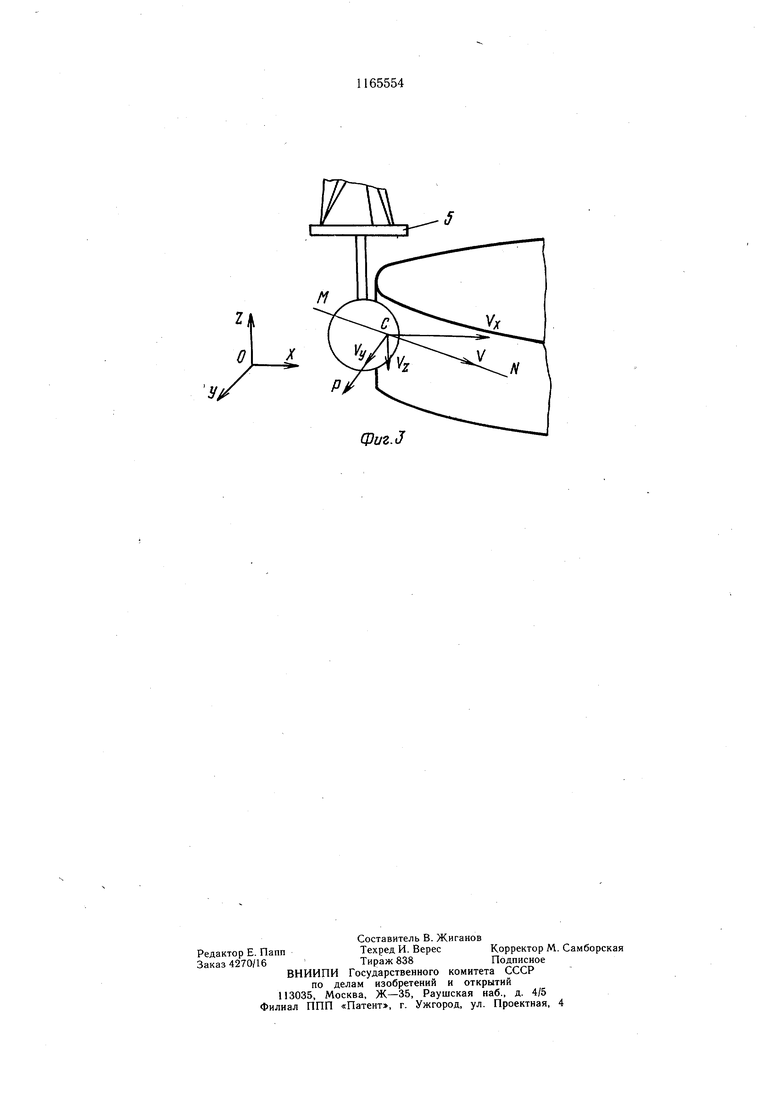
На фиг. 1 изображена схема обработки детали методом копирования; на фиг. 2 - схема определения направления действия силы (поверхность наконечника - цилиндр); на фиг. 3 - схема определения направления действия силы (поверхность наконечника - сфера).
Копировальное устройство содержит наконечник 1, связанный с ним датчик 2 определения направления силы взаимодействия наконечника 1 с копируемой поверхностью 3. Датчик 2 выполнен в виде двух фланцев 4 и 5, соединенных при помощи сферических щарниров 6 щестью стержнями 7 с установленными на них измерительными преобразователями 8 осевой силы, выходы которых соединены с блоком 9 определения направления силы взаимодействия наконечника 1 с копируемой поверхностью 3 и координат точки С контакта наконечника 1 с копируемой поверхностью 3. При взаимодействии наконечника 1 с копируемой поверхностью 3 на фланец 5 передается нагрузка от силы Р взаимодействия наконечника 5 1с копируемой поверхностью 3 и в стержнях 7 возникают осевы силы, уравновешивающие нагрузку, которые фиксируются измерительными преобразователями 8 осевой силы.
0 Под влиянием силы Р происходят малые осевые упругие деформации стержней 7, при этом фланцы 4 и 5 могут смещаться один относительно другого. В общем случае фланец 4 может смещаться в пространстве относительно фланца 5 по шести степеням свободы. Возникающие в стержнях 7 осевые усилия однозначно характеризуют силу р..
Текущие положения фланца 4 относительно фланца 5 однозначно характеризуются
0 уравнениями движения
е, «(t); I, 4 (t);{, 4(t);
е. ,W «5 -ts (t); ее ),
где 1 - if - длины отрезков, соединяющих три точки. А, В, D, принадлежащие фланцу 4, с тремя точками, а, в, d, принадлежащими фланцу 5, т. е.
0 1 аА; -Вг аВ; t., aD; «4 dD; dB; ЬВ.
Совокупность расстояний l - ig полностью однозначно определяет положение фланца 4 относительно фланца 5, так как отрезки аА, аВ, aD, dD, dB, ЬВ и стороны аЬ, bd, ad треугольника abd, а также стороны АВ, BD, AD треугольника ABD, являются ребрами трех тетраэдров Aabd, bABD
0 и dABD, которые есть геометрически неизменяемые фигуры.
Поскольку взаимное расположение стержней 7 известно, то по обычным формулам теоретической механики, например с помощью ЭВМ, рассчитывают вектор R равнодействующей шести осевых сил, который полностью определяет силу Р взаимодействия наконечника 1 с копируемой поверхностью 3.
Зная геометрические размеры элементов датчика 2 и их взаимное расположение, определяют координаты точки С контакта наконечника 1 с копируемой поверхностью 3 в системе координат OXYZ, связанной с датчиком 2 направления действия силы Р путем совместного решения двух уравнений, одно из которых есть уравнение линии действия силы Р, приложенной к наконечнику 1, а другое - уравнение поверхности наконечника 1 (на фиг. 2 - это уравнение цилиндрической поверхности). Касательную MN к копируемой поверхности 3, проходящую через точку С контакта,-определяют из уравнения нормали к линии действия силы Р в точке С контакта наконечника 1 с копируемой поверхностью 3.
Особо следует отметить, что при обрабсугке методом копирования поверхностей порядок обхода поверхности («строчки) задают, как обычно, тем или. иным программным устройством.
Это однозначно определяет одну касательную MN из множества лежащих в плоскости, нормальной силе Р взаимодействия наконечника 1 с копируемой поверхностью 3. По найденной касательной MN задают скорость движения точки контакта наконечника 1 с копируемой поверхностью 3.
Эта контурная скорость реализуется путем задания соответствующих скоростей приводам 10 и 11. Привод 11, перемещающий инструмент 12 для получения профиля обрабатываемой поверхности 13, осуществляет движение, направление которого определяется профилем копируемой поверхности 3. Материалы и режимы обработки могут быть те же, что и в устройстве, работающем по известному способу.
Использование предлагаемого способа и устройства для его осуществления по сравнению с существующими способами и устройствами копирования обеспечивает более
высокую точность и надежность копирования.
./
| название | год | авторы | номер документа |
|---|---|---|---|
| Копировальное следящее устройство для управления станком | 1982 |
|
SU1104470A1 |
| Двухкоординатное гидравлическое устройство к копировально-фрезерным станкам | 1960 |
|
SU139539A1 |
| Копировальное устройство для металлорежущихСТАНКОВ | 1979 |
|
SU837767A1 |
| Гидрокопировальный механизм | 1980 |
|
SU918027A1 |
| Система программного управления металлорежущими станками | 1961 |
|
SU147421A1 |
| Устройство для управления копировальным станком | 1977 |
|
SU703782A1 |
| Копировальный станок | 1979 |
|
SU795898A1 |
| Полуавтоматический электрокопировальный фрезерный станок для обработки фасонных контуров больших размеров, в частности самолетных шаблонов | 1948 |
|
SU86730A1 |
| Гидрокопировальный суппорт | 1977 |
|
SU691277A1 |
| КОПИРОВАЛЬНОЕ УСТРОЙСТВО | 1973 |
|
SU368989A1 |
1. Способ копирования на металлорежуших станках, заключающийся в том, что наконечник следящего устройства приводят во взаимодействие с копируемой поверхностью и по сигналам следящего устройства управляют движением наконечника относительно копируемой поверхности, отличаюлщйся тем, что, с целью повыщения точности и надежности процесса копирования, определяют текущее направление силы взаимодействия наконечника с копируемой поверхностью, находят положение точки их контакта и касательную к копируемой поверхности в этой точке и задают скорость движения точки контакта по касательной. 2. Устройство для копирования на металлорежущих станках, содержащее следящее устройство с наконечником, отличающееся тем, что, с целью повыщения точности и надежности процесса копирования, устройство снабжено блоком расчета направления действия силы и датчиком направления действия силы, установленным между наконечником и блоком расчета направления действия силы, выполненным в виде двух фланцев, соединенных при помощи сферических шарниров шестью стержнями с измерительными преобразователями силы, выходы которых соединены с блоком расчета направления действия силы.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Ворошилов М | |||
| С | |||
| Проектирование и расчет следящих систем с программным управлением | |||
| М., «Машиностроение, 1969, с | |||
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
