,75
Х-6о
00
о
05
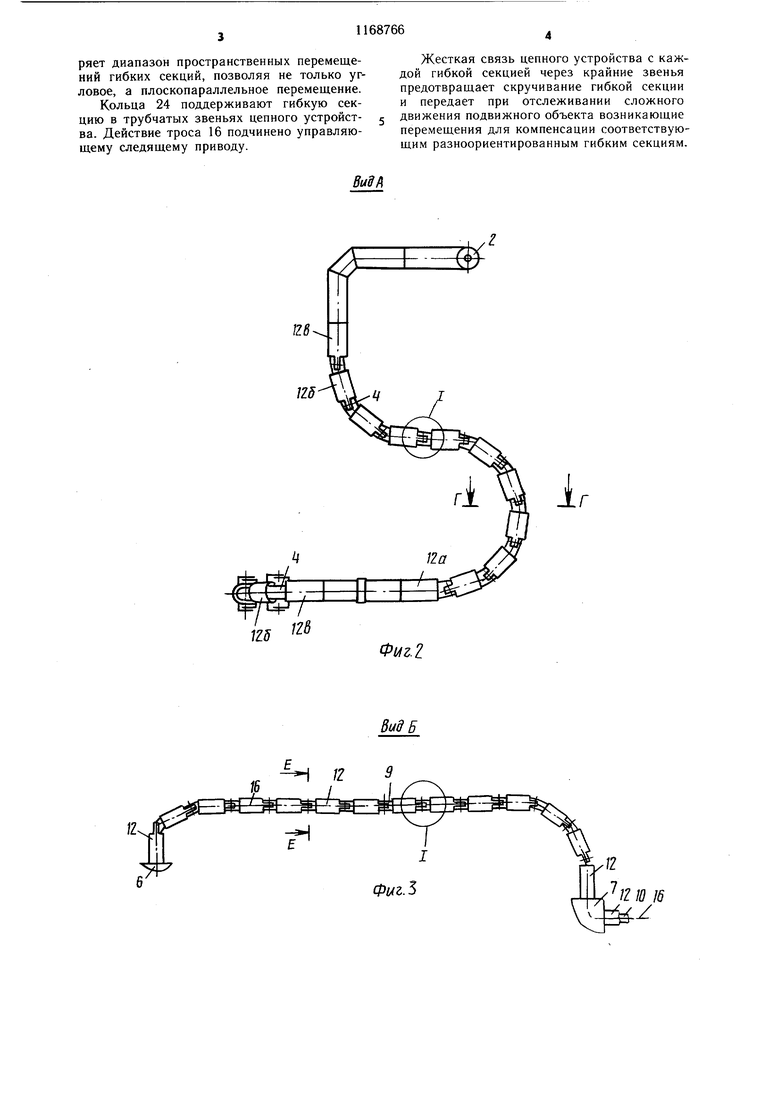
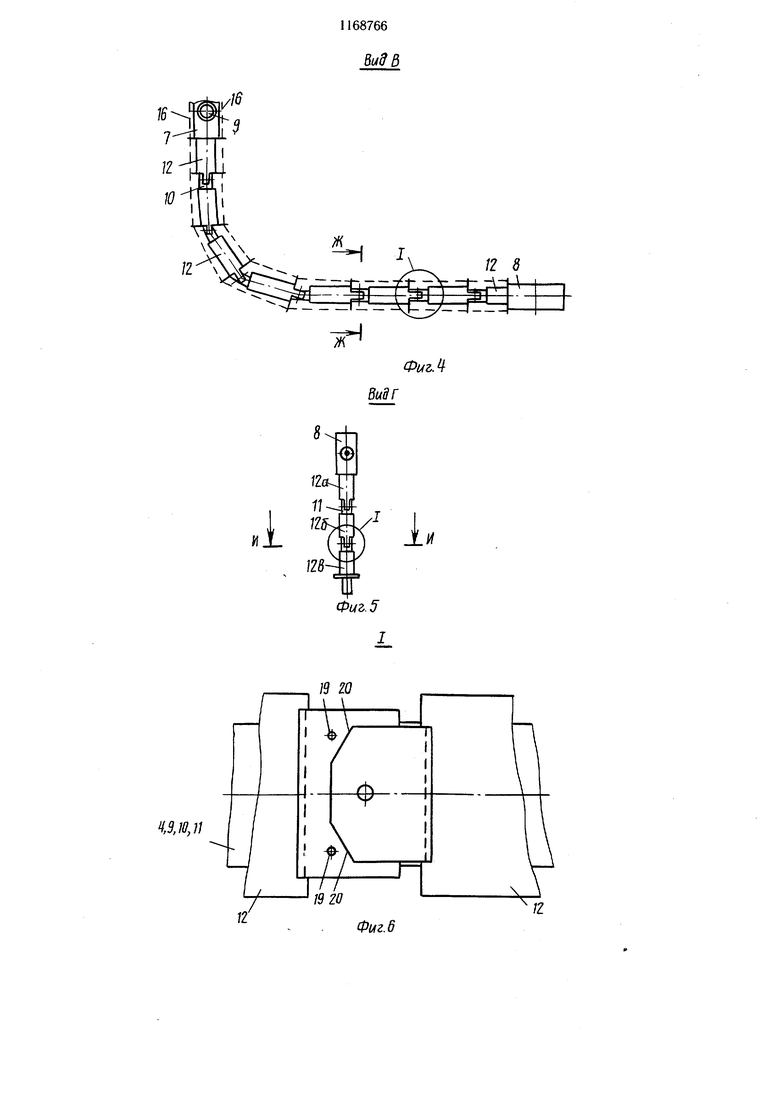
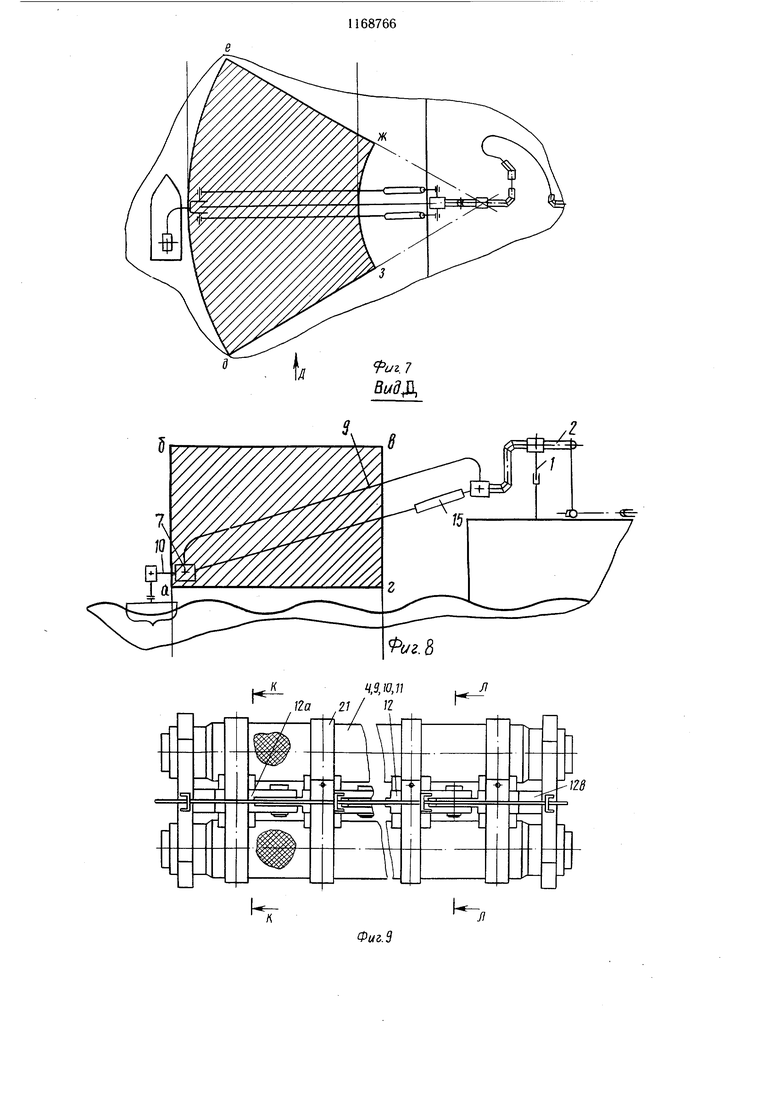
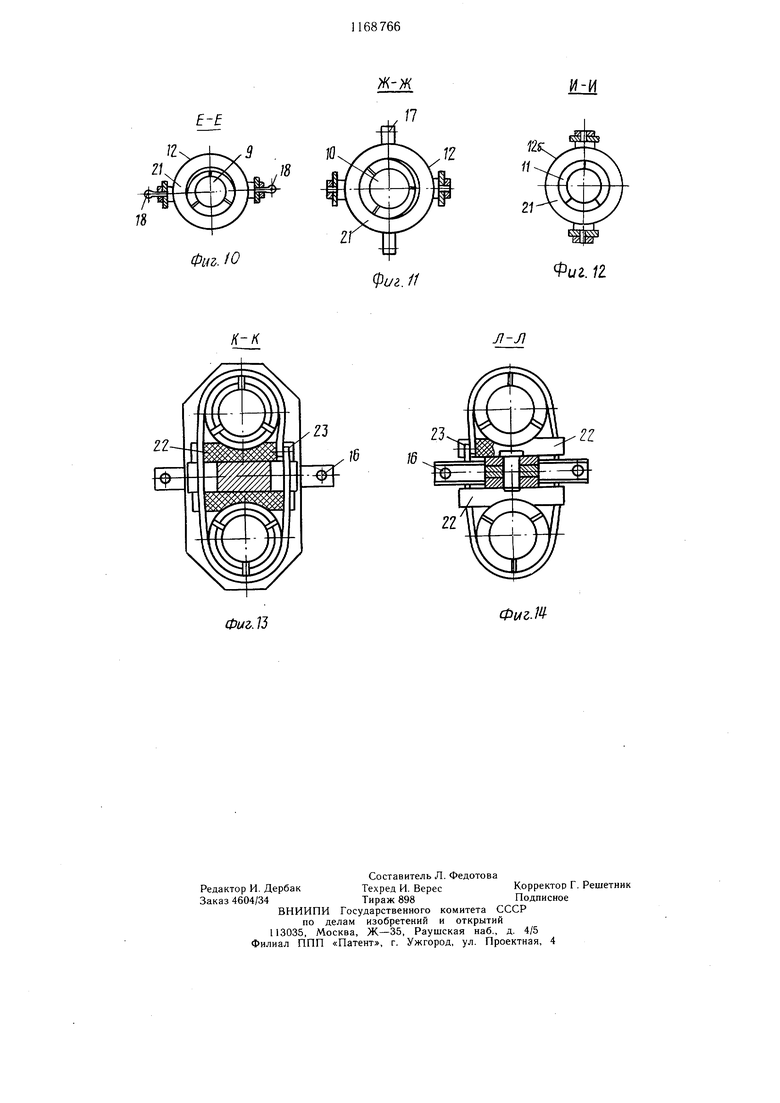
у Изобретение относится к криогенной технике, а точнее к трубопроводам, в которых эффективно перемещение особо подвижных, агрессивных, опасных или вредных сред, в частности криогенных, но также может быть использовано для передачи обычных подвижных сред или электрической энергии по гибким кабелям. Цель изобретения -. расширение диапазона перемещений гибких секций трубопровода за счет компенсации периодических угловых и линейных перемещений объектов. На фиг. 1 изображена схема трубопровода; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - вид Б на фиг. 1; на фиг. 4 - вид В на фиг. 1; на фиг. 5 - вид Г на фиг. 1; на фиг. 6 - узел I на фиг. 2-5; на фиг. 7 - рабочая зона трубопровода; на фиг. 8 - вид Д на фиг. 7; на фиг. 9 - соединения гибких секций с плоским цепным устройством; на фиг. 10 - разрез Е-Е на фиг. 3; на фиг. 11 - разрез Ж-Ж на фиг. 4; на фиг. 12 - разрез И-И на фиг. 5; на фиг. 13 - разрез К-К на фиг. 9; на фиг. 14- разрез Л-Л на фиг. 9. Трубопровод (фиг. 1) установлен в опоре 1 с возможностью поворота в двух ортогональных плоскостях при помощи эксцентрично размещенной оси 2 и соединен с неподвижным объектом 3 гибкой секцией 4 с цепным устройством, а другим концом соединен с подвижным объектом 5. Трубопровод выполнен из жестких секций 6-8 и гибких секций 4,9-11, соединенных с цепным устройством, выполненным из шарнирно соединенных трубчатых звеньев 12 (фиг. 2-5), ориентируемых в пространстве во взаимно перпендикулярных плоскостях. Жесткая секция 6 соединяется с жесткой секцией 7, расположенной на неподвижном объекте 3, при помощи щарниров 13 и 14 и управляющего следящего привода 15. ТаКИМ образом цепочка секций 10, 8 и 11 трубопровода получает управляемое свободное или следящее перемещение в вертикальной плоскости 27, при этом она может двигаться в параллельных плоскостях. Гибкая секция 4 (фиг. 2 перемещается благодаря цепному устройству, только в плоскости ZX, гибкая секция 9 и 11 (фиг. 3 и 5) - в плоскости ZY, а гибкая секция 10 (фиг. 4) - в плоскости ху, при этом движение передается цепочке секций 8 и 11. Передача изгиба гибкой секции 10 (фиг. 4) осуществляется двумя подвижными тросами 16, размещенными снаружи цепного устройства симметрично в горизонтальной плоскости. Тросы пропущены в соответствующие отверстия 17 выступов трубчатых звеньев, жесткую секцию 7, соответствующие отверстия осей 18 щарнирного соединения трубчатых звеньев гибкой секции 9 до жесткой секции 6, где располагается привод изгиба гибкой секции 10. В местах щарнирного соединения трубчатых звеньев (фиг. 6) предусмотрены упоры 19 и скосы 20 для ограничения угла поворота. Трубопровод свободно перемещается и отслеживает движение подвижного объекта следующим образом. Из исходного положения на объекте (фиг. 7) управляющим следящим приводом жесткая секция 7 вместе с присоединенными к ней элементами трубопровода перемещается в вертикальной и горизонтальной плоскостях в рабочую зону, заключенную условно прямоугольником абвг, зависящую от длины гибкой секции 9 и соответствующих размеров управляющего следящего привода 15. Затем отрабатывает тросовый привод так, чтобы гибкая секция 10 получила направление дальнего конца - ортогональное ближнему. С учетом длины гибкой секции 9 и 10 жесткая секция 8 может перемещаться в рабочей зоне, заключенной условно фигурой дежз. Совместное действие привода в вертикальной и горизонтальной плоскостях позволяет подвести свободный конец трубопровода к ответной части, расположенной на подвижном объекте 5 и герметично их состыковать. В момент подстыковки управляющая функция привода 15 прекращается и начинается отслеживание движений и колебаний подвижного объекта в пределах рабочих зон. После заправки трубопровод перемещают в исходное положение в обратном порядке. Плоское цепное устройство можно выполнить с гибкими секциями посредством хомутов 21, подкладок 22 и винтов 23 (фиг. 8). Управляющий следяющий привод 15 необходим для перемещения свободного конца трубопровода к ответной части на подвижном объекте 5 и отслеживания всех периодических угловых и линейных перемещений подвижного объекта после соединения жестко и герметично свободного конца трубопровода с ответной частью. Шарниры 13 и 14 управляющего следящего привода и сам он позволяют перемещать жесткую секцию 7 с присоединенными к ней элементами трубопровода паралллельно самой себе. Соединение жесткой секции 6 с неподвижным объектом 3 при помощи опоры 1, эксцентрично размещенной оси 2 и гибкой секции 4 с цепным устройством позволяет компенсировать угловые перемещения подвижного объекта 5, например вертикальное угловое перемещение носа и кормы подвижного объекта 5 около его центра тяжести. Размещение каждой гибкой секции в цепном устройстве непосредственно расщиряет диапазон пространственных перемещений гибких секций, позволяя не только угловое, а плоскопараллельное перемещение. Кольца 24 поддерживают гибкую секцию в трубчатых звеньях цепного устройства. Действие троса 16 подчинено управляющему следящему приводу.
Жесткая связь цепного устройства с каждой гибкой секцией через крайние звенья предотвращает скручивание гибкой секции и передает при отслеживании сложного движения подвижного объекта возникающие перемещения для компенсации соответствующим разноориентированным гибким секциям.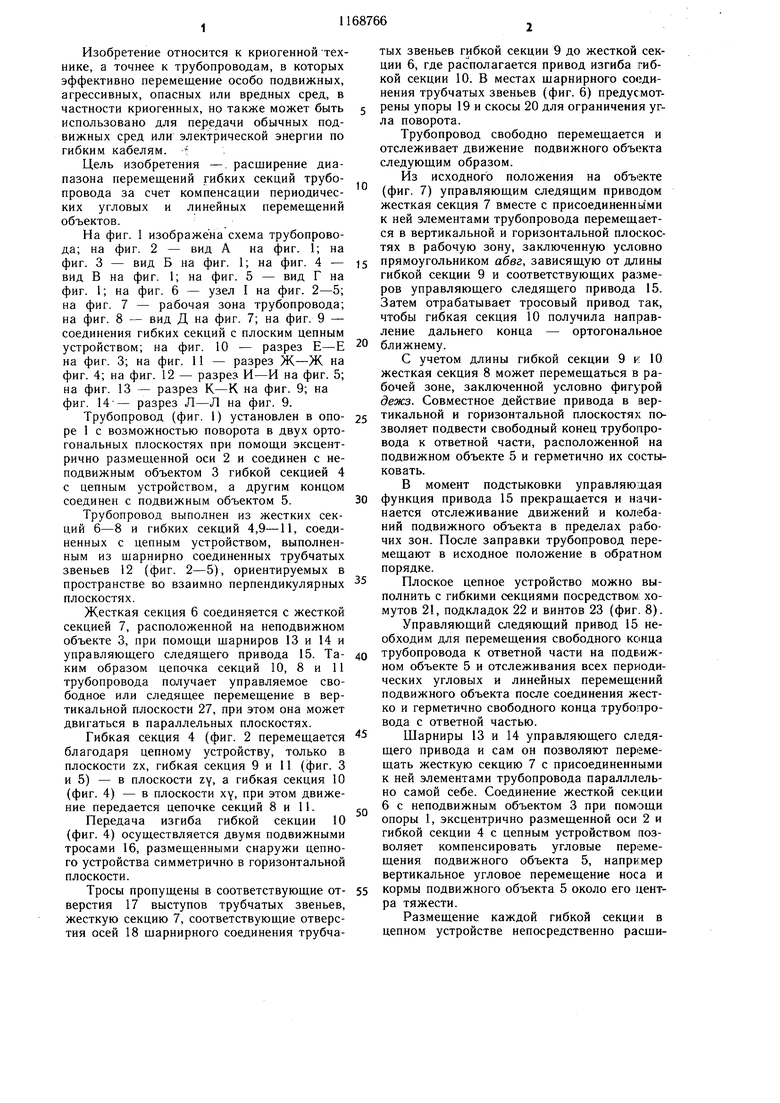
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для фрагментации каловой пробки в дистальной части прямой кишки человека | 2022 |
|
RU2779130C1 |
| ТЕРМОМЕХАНИЧЕСКАЯ САМОНАВОДЯЩАЯСЯ СИСТЕМА СЛЕЖЕНИЯ ЗА СОЛНЦЕМ | 1993 |
|
RU2090777C1 |
| Телескопическая стрела манипулятора | 1976 |
|
SU555007A1 |
| АГРЕГАТ ОТСЛЕЖИВАНИЯ И ВМЕШАТЕЛЬСТВА ДЛЯ ЖИВОТНОВОДЧЕСКОГО ПОМЕЩЕНИЯ | 2019 |
|
RU2804383C2 |
| Устройство для подачи жидких и газообразных сред к объекту | 1978 |
|
SU769179A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ДЕФОРМАЦИЙ И СПОСОБ ИЗМЕРЕНИЯ ДЕФОРМАЦИЙ | 2012 |
|
RU2540258C1 |
| КОНЦЕВОЙ ЭФФЕКТОР С ШАРНИРНЫМ УЗЛОМ И ПРИВОД ЭНДОСКОПИЧЕСКОГО ХИРУРГИЧЕСКОГО АППАРАТА | 2016 |
|
RU2636853C2 |
| АВТОМАТИЧЕСКАЯ ТРАНСМИССИЯ СИСТЕМЫ АЛЁШИНА | 2002 |
|
RU2229407C2 |
| Устройство для подачи воды к дождевальной машине в движении | 1984 |
|
SU1367834A3 |
| УСТРОЙСТВО И СПОСОБ СОЕДИНЕНИЯ ОРИЕНТИРУЕМЫХ ОБЪЕКТОВ | 2005 |
|
RU2374548C2 |
ТРУБОПРОВОД ДЛЯ СОЕДИНЕНИЯ ПОДВИЖНОГО И НЕПОДВИЖНОГО ОБЪЕКТОВ, состоящий из шарнирно соединенных гибких и жестких секций, установленных поочередно и взаимно ориентируемых в пространстве в разных плоскостях, причем каждая гибкая секция жестко связана с опорным устройством, выполненным из шарнирно соединенных звеньев, отличающийся тем, что, с целью расширения диапазона перемещений гибких секций трубопровода, он снабжен управляющим следящим приводом, щарнирно закрепленным между двумя смежными жесткими секциями, одна из которых соединена с объектом при помощи эксцентрично размещенной оси, поворачивающейся в двух ортогональных плоскостях, а опорное устройство выполнено в виде цепочки звеньев с управляющими тросами проходящими через звенья, причем каждая гибкая секция жестко связана с крайними звеньями цепочки. S Z (Л I 
т 12
1
г
.2 9
Buff В
Wo,n
J9ZO
7
/2
п
/Z
Фиг.6
1,
л Фи1. Ю . 11 Фиг. /2
2Z
. /J
Фьч-П
| Патент США № 3746060, кл | |||
| Топливник с глухим подом | 1918 |
|
SU141A1 |
| Устройство для передачи гибких съемных коммуникаций с судна на судно | 1973 |
|
SU526543A1 |
| Способ приготовления сернистого красителя защитного цвета | 1915 |
|
SU63A1 |
| УСТРОЙСТВО для ОТБОРА ПРОБ ВОЛОКНИСТЫХ МАТЕРИАЛОВ | 0 |
|
SU234602A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
