(54) ТЕЛЕСКОПИЧЕСКАЯ СТРЕЛА МАНИПУЛЯТОРА
| название | год | авторы | номер документа |
|---|---|---|---|
| МАНИПУЛЯТОРВСЕСОЮЗНАЯnATEb'TbO-TEXHiriЗНАЯ IHiri^:KAfffБНБЛ:^О>&:?ИА | 1971 |
|
SU318537A1 |
| Манипулятор | 1975 |
|
SU547195A1 |
| ТЕЛЕСКОПИЧЕСКАЯ СТРЕЛА ГРУЗОПОДЪЕМНОГО УСТРОЙСТВА | 1972 |
|
SU347292A1 |
| КРАН-МАНИПУЛЯТОР МЕТАЛЛОВОЗНЫЙ САМОСВАЛЬНОГО ТИПА | 2003 |
|
RU2245804C2 |
| Манипулятор | 1975 |
|
SU529072A1 |
| Многофункциональная летающая лаборатория (МФЛЛ) на базе транспортного самолета | 2020 |
|
RU2734170C1 |
| КРАНО-МАНИПУЛЯТОРНАЯ УСТАНОВКА | 2003 |
|
RU2264347C2 |
| ГИДРОСИСТЕМА КРАНО-МАНИПУЛЯТОРНОЙ УСТАНОВКИ | 2003 |
|
RU2252909C2 |
| УСТРОЙСТВО ДЛЯ СПАСЕНИЯ ЛЮДЕЙ | 2014 |
|
RU2552243C1 |
| Устройство автоматического управления гидравлическим экскаватором | 1988 |
|
SU1641953A1 |
i
Изобретение относится к машиностроению в частности к конструкциям манипуляторов для выполнения сборочных и монтажных работ и для загрузки металлорежущих станков.
Известны телескопические стрелы манипуляторов, снабженные тросовыми системами управления звеньями, расположенными за телескопической стрелой 1 . Наиболее близка к изобретению по технической сущности телескопическая стрела загрузочного устройства, содержащая наружную неподвижную и внутреннюю выдвижную секции, следящий гидропривод, снабженный золотником, управляющий орган и тросовую систему управления гидроприводом, содержащую трос и подвижный и неподвижный блоки, причем подвижный блок кинематически связан с выдвижной секцией стрелы, а трос связан одним концом с золотником гидропривода, а другим - с управляющим органом 2,
В известных стрелах управляющий орган расположен на неподвижной секпии стрелы на значительном удалении от зоны манипулирования, что затрудняет управление и снжает его точность.
Цель изобретения - повышение точности и удобства управления.
Для этого в предлагаемой стреле управляющий орган установлен на внутренней выдвижной секции стрелы, а тросовая система управления выполнена в виде полиспа- стного механизма, один из подвижных блоков которого жестко связан с внутренней секцией стрелы, а другой - кинематически связан с золотником гидропривода, оба конца троса закреплены на внутренней секции, а управляющий орган связан с ветвью полиспастного механизма, расположенно)-; между подвижными блоками.
Подвижный блок может быть связан с золотником через кулисный механизм с регулируемым передаточным отношением.
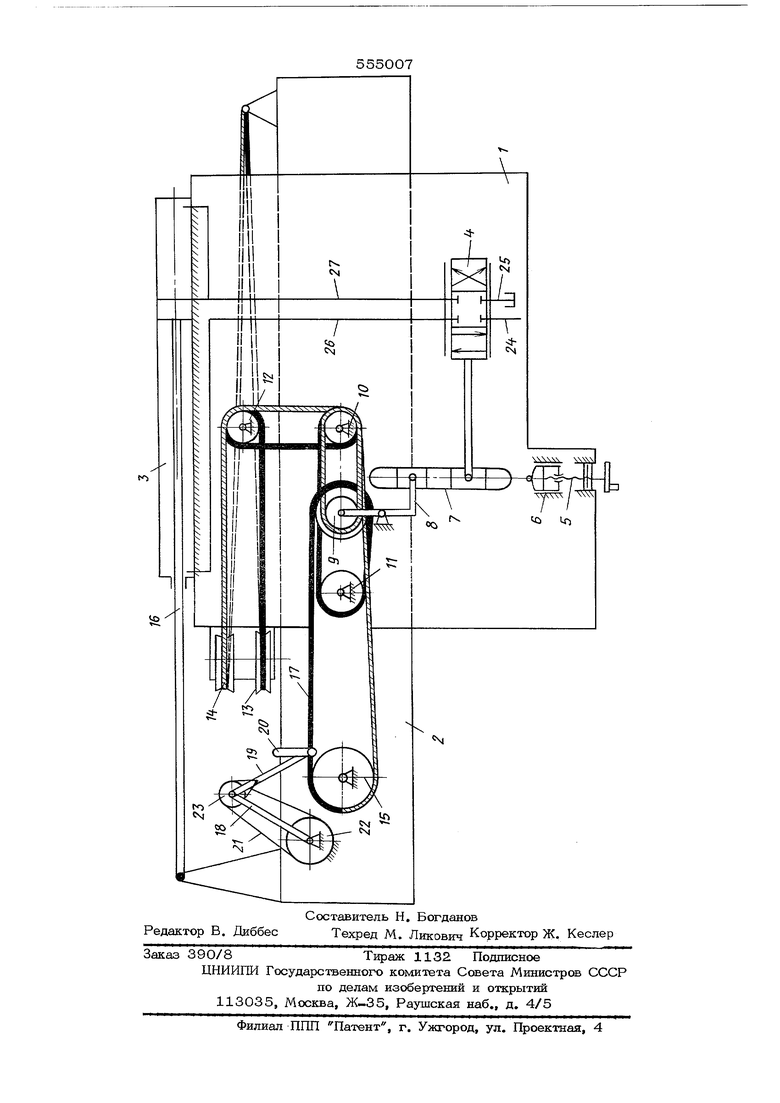
На чертеже изображена принципиальная схема предлагаемой стрелы.
Телескопическая стрела манипулятора состоит из наружной неподвижной 1 и внутренней выдвижной 2 секций. На наружной секции 1 установлен гидроцилиндр 3, четырехкромочный золотник 4, кулисный механизм регулировки передаточного отношения, содержащий винт 5, гайку 6, кулису 7 и рьшаг 8, полиспастный механизм, состоящий из подвижного блока 9, связанного с рычагом 8, отклоняющих блоков 10 и 11 и направляющих блоков 12-14, закрепленных на неподвижной секции. На выдвижной секции закреплены блок 15, управляющий орган, шгок 16 гидроцилиндра и концы управляющего троса 17.
Управляющий орган состоит, например, из двух шарнирно соединенных звеньев 18 и 19 равной длины, одно из которых шарнирно установлено на выдвижной секции 2, а другое соединено с управляющим тросом 17 и снабжено рукояткой 20 управления. На осях управляющего органа установлена передача с гибкой связью 21,ведущий элемент 22 которой жестко связан с выдвижной секцией 2, а ведомый элемент 23 жестко связан со звеном 19, причем диаметр ведущего звена вдвое больше диаметра ведомого звена.
Такая конструкция управляющего органа обеспечивает перемещение конца звена 19 с рукояткой 2О и, следовательно, управляющего троса 17 по прямой линии.
Один конец управляющего троса 17, закрепленный на внутренней секции 2, огибает последовательно блоки 14,12,10,9, затем опять огибает блок 10, затем последовательно огибает блоки 15,9,11,10,12,13, а другой его конец закрепляют на выдвижной секции. Подвижный блок 9, связанный золот НИКОМ 4, условно показан состоящим из дву блоков разного диаметра. Шток 16 гидро- цилиндра 3, установленного на наружной секции 1, крепится к внутренней секции 2. Следящий золотник 4 связьшает линии нагнетания 24 и слива 25 с полостями гидроцилиндра 3 трубопроводами 26 и 27.
Телескопическая стрела манипулятора работает следующим образом.
При перемещении рукоятки 20, например вправо управляющий трос 17 передвигает подвижной блок 9, а вместе с ним и рычаг 8 вправо. При этом кулиса 7, покачиваясь
влево, перемещает щток золотника 4 влево. Масло поступает через следящий золотник и трубопровод 26 в левую полость гидроцилиндра 3, перемещает щток 16 гидроцилиндра вправо. Перемещение щтока 16 вправ приводит к втягиванию выдвижной секции 2 манипулятора.
Аналогичным образом происходит выдвижение секции 2.
Коэффициент усиления регулируют с помощью винта 5 и гайки 6. При вращении винта 5 меняется положение центра качения кулисы 7 и соответственно величины плеч рычага, передающего движение от рычага 8 на щток золотника 4.
Формула изобретения
о тли чающаяся тем, что, с целью повышения точности и удобства управления, управляющий орган установлен на внутренней выдвижной секции стрелы, а тросовая система управления выполнена в виде полиспастного механизма, один из подвижных блоков которого жестко связан с внутренней секцией стрелы, а другой - кинематически связан с золотником гидропривода, оба конца троса закреплены на внутренней секции, а управляющий орган связан с ветвкю полиспастного механизма, расположенной между подвижными блоками.
Источники информации, принятые во внимание при экспертизе:
