Изобретение относится к машиностроению, в частности к манипуляторам.
Известна рука манипулятора, состоящая из шарнирно связанных между собой ав&ньев и элементов системы приводов в шар иирах ij.
Недостатком указанного устройства ивляется постоянство его характеристик. Me меняющихся в зависимости от типа выполняемых, им технологических опера адй.
Целью изобретения является обеспечен нне возможности регулирования точностных и скоростных хара стеристик руки ма нвпулятора.
Цель достигается тем, чтр звенья выполнены в виде пантографов Шёйнера н снабжены приводом изменения их длины, который связан со звеньями через устрой ство пропорциональности изменения длины 8ТИХ звеньев, выполненное в виде зубчатой передачи, зубчатые ксхлеса которой установлены в шарнирах пантографов и Kttнематическй связаны между собой.
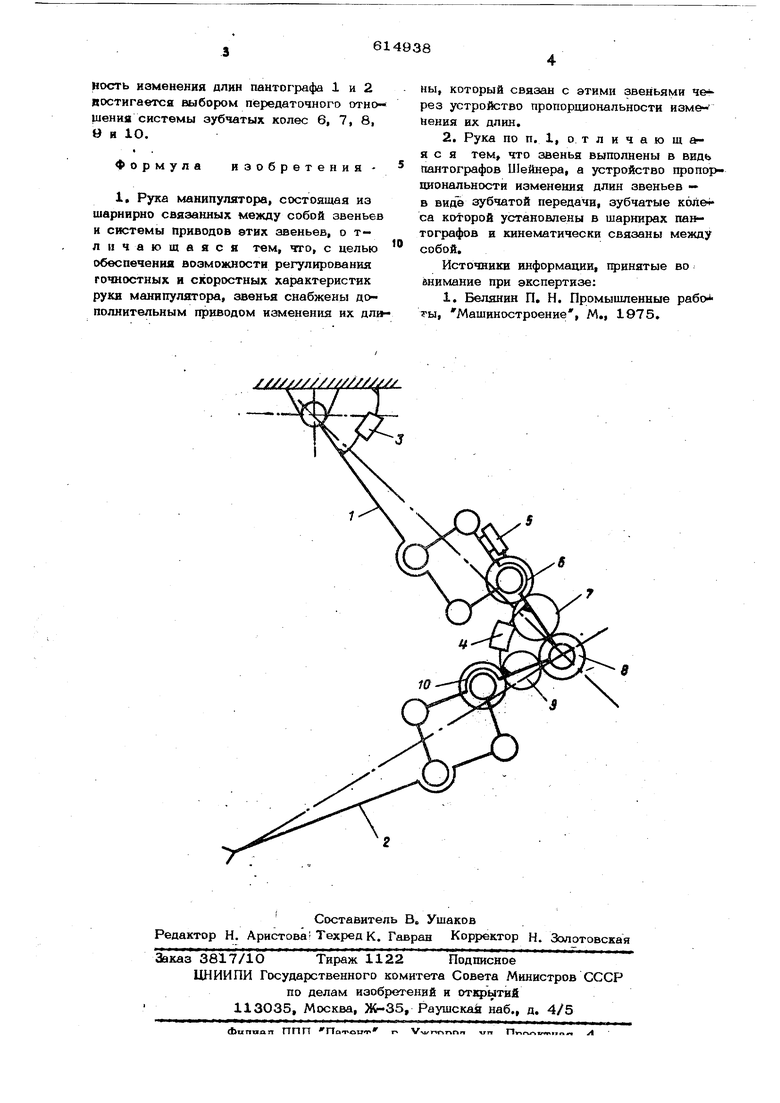
На чертеже показана рука манипулято ра с использованием пантографов Шейнера.
Рука манипулятора содержит два пантографа 1 и 2. В шарнирах,соединяющих звенья со стойкой и между собой, распо Ьожены элементы 3 и 4 системы привода. На пантографе 1 расположен привод в иэ Менения длины пантографа, он соединен с ведущим зубчатым колесом 6, которое 1входит в зубчатую передачу, образова йую паразитными колесами 7, 8 и 9 и ведомым колесом 1О.
При необходимости изменения длин пантографов 1 и 2 руки манипулятора производят включеиие привода 5. Последний осущертвляет вращение ведущего зубчато го колеса 6. От колеса 6, во-первых производится изменение кон(|н1гураш1И замкну того контура и, следовательно, длины па тографа 1 и, во-вторых, передается вращающий момент через зубчатые колеса 7 8, 9 и 10 на пантограф 2, Ведомое колесо 10 осуществляет изменение конфигурации замкнутого контура пантографа 2 и, следовательно, его длины. Пропорциоиал Вость изменения длин пантографа 1 и 2 достигается выбором передаточного отно шения системы зубчатых колес 6, 7, 8, 9 я 1О, Формула изобретения1. Рука манипулятора, состоящая из шарнирно связанных между собой звеньев и системы приводов этих звеньев, отличающаяся тем, ягго, с целью обеспечения возможности регулирования точностных и скоростных характеристик руки манипулятора, звенья снабжены дополнительным приводом изменения их длI ны, который связан с этими ;звеньями че рез устройство пропорциональности изменения их длин. 2, Рука по п. 1, отличающаяся тем, что звенья выполнены в видь пантографов Шейнера, а устройство пропорциональности изменения длин звеньев - в виде зубчатой передачи, зубчатые коле4са которой установлены в шарнирах пантографов и кинематически связаны между собой. Источники информации, тфинятые во анимание при экспертизе; 1. Белянин П. Н. Промышленные , Машиностроение, М., 1975,
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1986 |
|
SU1364467A1 |
| МАНИПУЛЯТОР-ТРИПОД С ШЕСТЬЮ СТЕПЕНЯМИ ПОДВИЖНОСТИ | 2008 |
|
RU2403143C2 |
| Манипулятор | 1986 |
|
SU1379104A1 |
| Устройство для преобразования движений | 1991 |
|
SU1784474A1 |
| ОБЛИЦОВОЧНЫЙ МАНИПУЛЯТОР | 1990 |
|
RU2023582C1 |
| Манипулятор | 1987 |
|
SU1509245A1 |
| Манипулятор | 1987 |
|
SU1481055A1 |
| МАНИПУЛЯТОР ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2008 |
|
RU2390406C1 |
| Манипулятор | 1987 |
|
SU1537516A1 |
| Привод манипулятора | 1982 |
|
SU1050862A2 |
