теля 1, коммутационных и функциональ- igмотки формируются токи, которые соз- ных блоков источника постоянногодают требуемый электромагнитный мо- сигнала, задатчика момента и датчи-мент и электромагнитные силы, комков 52, 53 линейных ускорений. Якор- гпенсирующие радиальные силы инерции, ная обмотка расположена на четырехдействующие на ротор. 3 ил. равных секторах, оси которых парал
| название | год | авторы | номер документа |
|---|---|---|---|
| Моментный вентильный электродвигатель | 1989 |
|
SU1742949A2 |
| Моментный электродвигатель постоянного тока с ограниченным углом поворота | 1990 |
|
SU1757038A1 |
| Моментный вентильный электродвигатель | 1987 |
|
SU1448373A1 |
| Моментный вентильный электродвигатель | 1988 |
|
SU1642558A1 |
| Моментный вентильный электродвигатель | 1989 |
|
SU1734172A1 |
| Устройство для настройки моментного вентильного электродвигателя | 1987 |
|
SU1515273A1 |
| Устройство для настройки моментного вентильного электродвигателя | 1989 |
|
SU1774454A1 |
| Устройство для настройки моментного вентильного электродвигателя | 1987 |
|
SU1580495A1 |
| Моментный вентильный электродвигатель | 1989 |
|
SU1742950A1 |
| Моментный вентильный электродвигатель | 1986 |
|
SU1363413A1 |
Изобретение относится к момент ным электродвигателям с неограниченным углом поворота ротора и может быть использовано в прецизионных электроприводах, от которых требует
I
Изобретение относится к электротехнике, в частности к моментным электродвигателям с неограниченным углом поворота ротора, и может быть использовано в прецизионных электроприводах, от которых требуются повышенный ресурс, работы и плавность хода ротора.
Целью изобретения является пЬвы- шение надежности и плавности хода при работе на подвижном основании. На фиг. 1 представлена функциональная схема моментного вентильного электродвигателя у на фиг.2 показан синхронный электродвигатель,поперечное сечениеJ на фиг. 3 - расположение датчиков линейных ускорений.
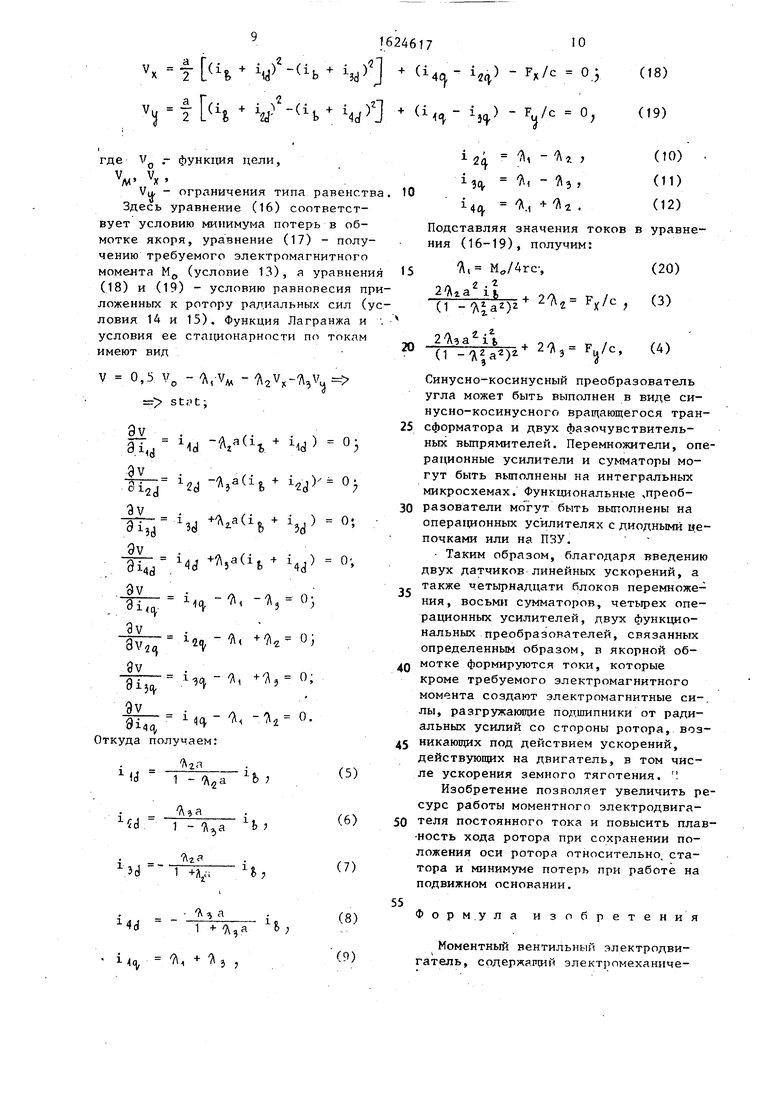
Моментный вентильный электродвигатель содержит синхронный электродвигатель 1 с фазами 2-9 обмотки якоря и с ротором-индуктором 10, си- нусно-косинусный преобразователь 11 перемножители 12-7.7, сумматоры 28-3 усилители 36-43 мощности, датчики 44-51 тока, датчики 52, 53 линейных ускорений, функциональные преобразователи 54, 55, задатчик 56 момента, масштабный преобразователь 57, сумматоры 58-65, перемножители 66-69, операционные усилители 70-73, источник 74 постоянного сигнала.
Ротор-индуктор 10 механически св з,ан с ротором синусно-косинусного побразователя, синусный и косинусный выходы которого подключены к входам перемножителей 12-19 и 20-27 соответственно.
5
0
35
5
40
50
55
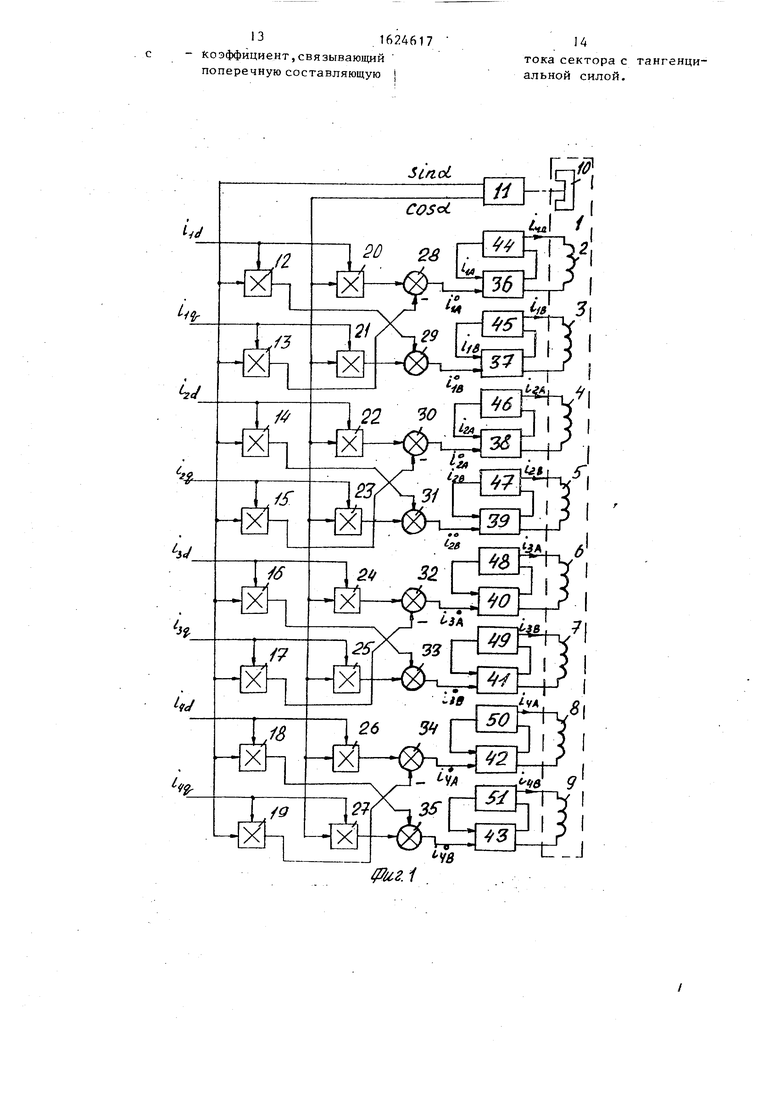
Выходы датчиков 52, 53 подключены к входам функциональных преобразователей 54, 55, выходы которых подключены соответственно к входам перемножителей 66, 68, к инвертирующему входу сумматора 63, к входу сумматора 65 и к входам перемножителей 67, 69, сумматора 62, к инвертирующему входу сумматора 64. Выход источника 74 постоянного сигналя подключен к входам сумматоров 58-61, вторые входы которых подключены к выходам операционных усилителей 70-73, а выходы - к вторым входам перемножителей 66-69 соответственно, выходы которых подключены к входам операционных усилителей 70, 71 и к инвертирующим входам операционных усилителей 72, 73. Выходы операционных усилителей 70-73 подключены к их вторым инвертирующим входам. Выход задатчика 56 момента через масштабный преобразователь 57 соединен с вторыми входами сумматоров 62-65.
Выходы операционных усилителей 70-73 подключены к вторым входам перемножителей 12, 20i 14,22; 16,24;
подключены к вторым инвертирующим входам сумматоров 28, 30, 32, 34.
Выходы сумматоров 28-35 подключены к входам усилителей 36-43 мощности соответственно. Их выходы подключены к фазам 2-9 обмотки якоря через входы датчиков 44-51 тока соответственно, выходы которых подключены к вторым инвертирующим входам усилителей 36-43 мощности.
Фазы 2,3; 4,5; 6,7J 8,9 якоря занимают на статоре четыре сектора I-IV, оси соседних секторов пзаим- но перпендикулярны. Оси датчиков 52, 53 ускорения параллельны осям секторов 1,3 и секторов 2, 4 соответственно. Фазы 3, 5, 7, 9 опережают фазы 2 , 4, 6, 8 соответственно на (Г/2 эл.рад.
Функциональные преобразователи 54 55 реализуют функпзш, определяемые равенствами:
мые датчиками 52, 53. Синхронный электродвигатель 1 имеет на статоре двухфазную разделенную на четыре сектора (I-IV) с фазами 2,3} 4,5, 6,7, 8,9 соответственно обмотку и ротор-индуктор 10. Оси двух соседних секторов взаимно перпендикулярны. Датчики 52 и 53 линейных ускорений установлены неподвижно относительно статора и их оси параллельны осям секторов I, III и II, IV соответственно. Число пар полюсов ротора-индуктора 10 делится на четыре (на фиг.З р 8). Фазы 3, 5, 7, 9 сдвинуты относительно фаз 2, 4, 6, 8 на 90 эл.град. в положительном направлении. Один сектор обмотки якоря образует р/2 полюсов. Крестиками и точками показаны положительные направления токов фаз. Показаны направFrf
ления тангенциальных V ftf , F4Ј и радиальных F4t, , F2l., , F4t, электромагнитным сил. Представлены эквивалентные токи возбуждения ротора-индуктора ij, а также продольные i1cj , iicj , i , i4cj и поперечные
,, , J составляющие сиг- темы токов всех четырех секторов. То246176
ки возбуждения и продольные составляющие токов якоря изображены совпадающими по направлению с радиальными силами, а поперечные составляющие токов якоря - с тангенциальными силами, которые они создают. Показаны направления радиальных усилий ротора Fx и FU на подшипники под действием
Ю линейных ускорений а и а ц.
Моментный вентильный электродвигатель работает следующим образом.
Задатчик 56 момента вырабатывает сигнал, пропорциональный требуемому
15 моменту Мо, который , проходя через масштабный преобразователь 57 с коэффициентом преобразования 1/4гс, где
0
5
г - наружный радиус ротора-индуктора, с - постоянный коэффициент, поступает на первые входы сумматоров 62-65 в виде сигнала, пропорционального множителю Лагранжа fl. . Датчики 52 и 53 линейных ускорений вырабатывают сигналы, пропорциональные ускорениям а х и а,. но и равные Рх и F
соответственР„ па
X
0
где Fj(
FSf
3
V
па
Ч
усилия, действующие на ротор согласно линейным ускорениям ад и аи, m - масса подвижных частей. Эти сигналы поступают на функциональ- 5 ные преобразователи, которые реализуют функции:
г V (FX)
ft} Ц (),(2)
0
представленные в неявном виде:
126
5
(1 -А|а)г
2М2 (1 -fl|a)2
-
Vе;
271, Tjc ,
(3)
(4)
где ftz. Aj- множители Лагранжа; i. - приведенный ток возбуждения обобщенной электрической машины} а - постоянный коэффициент. Источник 74 постоянного сигнала вырабатывает сигнал, пропорциональ- ,ный ie, который поступает на первые входы сумматоров 58-61. С выходов этих сумматоров сигналы поступают на вторые входы перемножителей 66- 69 соответственно, а на первые входы
71
перемножителей 66, 68 и 67, 69 поступают сигналы, пропорциональные Д и Л соответственно. Сигналы с выходов перемножителей 66,67 и 68,69 поступают на первые входы операционных усилителей 70, 71 и на первые инвертирующие входы операционных усилителей 72, 73 соответственно. С их выходов сигналы поступают на вторые входы сумматоров 58-61 соответственно. Четыре функциональных узла, каждый из которых состоит из сумматора, перемножителя и операционного усилителя, формируют продольные токи iAj , i4d, ijj, i4d в соответствии с уравнениями:
. Н
Id
1 -Ъга
(5)
ft a
1 + fl«a
-Ь
-ъ.
(6)
(7)
(8)
Одновременно сигнал, пропорциональный Ал поступает на второй инвертирующий вход сумматора 63 и на вто- рой вход сумматора 65,, а сигнал, пропорциональный Tlj , поступает на второй вход сумматора 62 и на второй инвертирующий вход сумматора 64. На выходе сумматоров 62-65 формируются поперечные токи i-, ig, в соответствии с уравнениями:
(9) (10)
(11) (12)
+ Ъъ j i /Л, - 1}
щ - ;
14 в +/Л«- Синусно-косинусный преобразователь механически связан с ротором-индуктором 10 и вырабатывает сигналы, прпорциональные sin об и cosO, где - угол поворота ротора-индуктора. Сигнал, пропорциональный sin Об, поступает на первые входы перемножителей 12-19, а пропорциональный cosO --на первые входы перемножи
.г г«
i4
0
5
0 5
0
г
78
телей 20-27. На вторые входы перемножителей 12 и 20, 13 и 21, 14 и. 22, 15 и 23, 16 и 24, 17 и 25, 18 и 26, , 19 и 27 поступают сигналы, пропорциональные i, 12,,), i-щ, ijcj, , i4a соответственно. С выходов перемножителей 20-27 сигна- лы поступают на первые входы сумматоров 28-35 восьми каналов формирования якорных токов. На вторые инвертирующие входы сумматоров 28, 30, 32, 34 и на вторые входы сумматоров 29, 31, 33, 35 поступают сигналы с перемножителей i 3 , 15, 17, 19 и 12, 14, 16, 18 соответственно. На выходах сумматоров 28-35 формируются требуемые оптимальные токи, if, , ifu
.О о .с «О .0
г2& 1-9А Ч& г4А ЧВ которые сформированы синусно-косинусными преобразователями 11, перемножителями 12-27, сумматорами 28-35 в соответствии с известными формулами:
1Д ijcosoi- } 1„ i sinoi + i.cos oi ,
Эти токи, проходя через усилители мощности, запитывают восемь фаз якорной обмотки и обеспечивают создание тангенциальных (F, F, Fyj., F4-j) и радиальных (V(r , F2r , F,r , F) электромагнитных сил, действующих на ротор в каждом секторе и удовлетворяющих следующим условиям:
F, +F M0/r; (13) F Ј-F3t, +F4Ј -F FX) (14) Fur-F4r -F,C F9 15)
8результате создаются требуемый момент Мл и радиальные усилия, разгружающие подшипники от действия сил инерции при минимальных потерях в обмотке якоря.
Равенства с (1) по (12) получаются в результате рещения задачи на ус ловий экстремум с тремя ограничениями типа равенства (13), (14),(15), которая решается методом множителей
Лагранжа: найти токи i
М
L2d
г1о, Hd 4d г4 удовлетворяющие соотношениям:
г min
(16) (17)
Vx f(H+ (ib + + Ц V °;
.)
V fo V - H+V1 +(i
где VQ - функция дели,
V V V/W X
Vur - ограничения типа равенства
Здесь уравнение (16) соответствует условию минимума потерь в обмотке якоря, уравнение (17) - получению требуемого электромагнитного момеита М0 (условие 13), а уравнения (18) и (19) - условию равновесия приложенных к ротору радиальных сил (условия 14 и 15). Функция Лагранжа и . условия ее стационарности по токам имеют вид
V 0,5 V0 - VVM - VK-V stPt;
1;ld
V(ii + ЧР °3 -V(H + y °;
X2d
Ј3j i9d) 0;
i4J n,a(ib + ) 0;
8i}- , ,-0;
9V- ; Л Л - 0
9iH LH 4 u
Откуда получаем:
V °;
.)
V - Vе °;
(18) (19)
i-ц - Аг ЈН Ъ, Ъг ,
Mq, .1 + 4 Подставляя значения токов в уравнения (16-19), получим:
(Ю)
(11) (12)
5
20
(1 ) 3
Синусно-косинусный преобразователь угла может быть выполнен в виде си- нусно-косинусного вращающегося трансформатора и двух фазочувствитель- ных вьтрямителей. Перемножители, операционные усилители и сумматоры могут быть выполнены на интегральных микросхемах. Функциональные чпреобразователи могут быть выполнены на операционных усилителях с диодными цепочками или на ПЗУ.
Таким образом, благодаря введению двух датчиков линейных ускорений, а также четырнадцати блоков перемножения, восьми сумматоров, четырех операционных усилителей, двух функциональных преобразователей, связанных определенным образом, в якорной обмотке формируются токи, которые кроме требуемого электромагнитного момента создают электромагнитные си-, лы, разгружающие подшипники от радиальных усилий со стороны ротора, возникающих под действием ускорений, действующих на двигатель, в том числе ускорения земного тяготения. г
Изобретение позволяет увеличить ресурс работы моментного электродвигателя постоянного тока и повысить плав- ность хода ротора при сохранении положения оси ротора относительно, статора и минимуме потерь при работе на подвижном основании.
Формула изобретения
Моментный вентильный электродвигатель, содержащий электромеханиче 11
ский преобразователь с якорной обмоткой на статоре из восьми фаз и размещенной на четырех рапных секторах по две фазы на каждом, четные фазы сдвинуты в сторону опережения по направлению вращения относительно нечетных фаз на /2 эл.рад. и с ротором-индуктором, механически связанным с валом Синусно-косинусного преобразователя угла, восемь каналов формирования якорных токов, каждый из которых содержит сумматор, выход которого подключен к неинвертирующему входу усилителя мощности, а к его инвертирующему входу подключен выход датчика тока, к входу которого и к выходу усилителя мощности подключена соответствующая фаза якорной обмотки, два перемножителя и за- датчик момента, отличающий. с я тем, что, с целью повышения надежности и плавности хода при работе на подвижном основании, введены источник постоянного сигнала, четыре операционных усилителя, восемнадцать перемножителей, восемь сумматоров, два функциональных преобразователя и два датчика линейных ускорений, оси первого и второго датчиков паралель- ны осям первого и второго секторов соответственно, выходы перемножителей с первого по восьмой подключены к первым входам сумматоров с первого по восьмой каналов соответственно, выходы девятого, одиннадцатого, тринадцатого и пятнадцатого перемножителей подключены к вторым входам сумм аторов второго, четвертого, шестого, восьмого каналов соответст- венно, а выходы десятого, двенадцатого, четырнадцатого и шестнадцатого перемножителей подключены к вторым инвертирующим входам сумматоров первого, третьего, пятого и седьмого каналов соответственно, косинусный и синусный выходы синусно-косинусно- го преобразователя подключены к первым входам перемножителей с первого по восьмой и с девятого по шестнад- цатьтй соответственно, операционные усилители с первого по четвертый охвачены каждый глубокой отрицательной обратной связью на вторые входы а их выходы подключены к вторым вхо- дам перемножителен первого и девятого, третьего и одиннадцатого, пятого и тринадцатого, седьмого и пятнадцатого соответственно, а также
0 5 0 ,д 0 с
5
2 Ьаг1| (1 )
2 Азаг1|
(1 -fl|aO
где Д2, л - множители Лангранжа задачи на условный экстремум ,
-постоянный коэффициент;
-эквивалентный ток возбуждения ротора-инлукто- Р-т,
-масга подвижных частей;
т + тад/с-, + 2 Ц та и/с
т
131624617
с - Коэффициент,связывающий поперечную составляющую i
1
14
тока сектора с тангенциальной силой.
J
ФЬг.1