Для регулирования хода шахтной подъемной машины с асинхронным нриводом применяют регуляторы, содержащие электрический датчик скорости, датчик заданного напряжения, управляемый указателем глубины, и усилитель. На вход последнего подается разность напряжений указанных датчиков, a к выходу подключена обмотка возбуждения генератора динамического торможения.
Однако известные регуляторы подобного рода не обеспечивают точности регулирования при динамическом торможении во всем диапазоне скоростей, особенно в области малых скоростей.
Предлагаемый регулятор более совершенен, так как он лишен указанного недостатка.
Это достигается тем, что в качестве усилителя применен однотактныи магнитный усилитель, снабженный обмоткой смещения, подключенной к выходу индуктивного фазочувствительного датчика, подвижная система которого связана с указателем глубины.
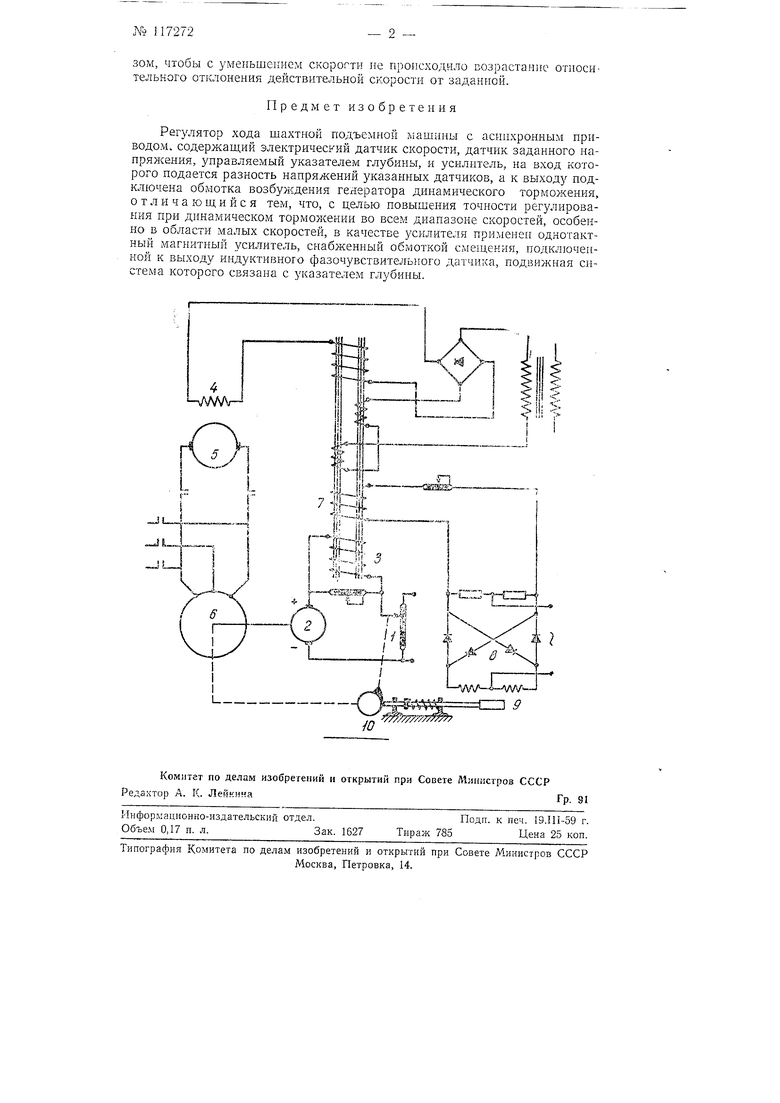
На чертеже изображена принципиальная схема предлагаемого регулятора.
Регулятор работает на принципе сравнения заданной и действительной скоростей, измеряемых делителем напряжения / и тахогенератором 2. Рассогласование подается в обмотку управления 5 магнитного усилителя, питающего обмотку возбуждения- генератора 5, обеспечивающего динамическое торможение приводного асинхронного двигателя 6. Магнитный усилитель снабжен также обмоткой смещения 7, подключенной к выходу индуктивного фазочувствительного датчика 8 соленоидного типа с двухполупериодным выпрямителем.
Направление тока в обмотке смещения усилителя зависит от знака смещения сердечника 5 подвижной системы датчика относительно нулевой точки. Сердечник 9 связан с указателем глубины 10.
Уменьшение смещения магнитного усилителя приводит к переходу рабочего режима на новые характеристики магнитного усилителя Регулирование смещения магнитного усилителя осуо{ествляется таким обра
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ динамического торможения шахтных подъемных машин с асинхронным приводом | 1957 |
|
SU109478A1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ПРОИЗВОДИТЕЛЬНОСТИ ТКАЦКОГО СТАНКА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2045457C1 |
| УСТРОЙСТВО для РЕГУЛИРОВАНИЯ СКОРОСТИ | 1968 |
|
SU218389A1 |
| ПРЕОБРАЗОВАТЕЛЬ ГЕОМАГНИТНОГО ПОЛЯ ДЛЯ ИНКЛИНОМЕТРА | 2002 |
|
RU2249790C2 |
| СПОСОБ УЛУЧШЕНИЯ ДИНАМИЧЕСКОЙ УСТОЙЧИВОСТИ И ДЕМПФИРОВАНИЯ КОЛЕБАНИЙ ЭЛЕКТРОЭНЕРГЕТИЧЕСКИХ СИСТЕМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2339144C1 |
| Реверсивный тиристорный преобразователь частоты | 1975 |
|
SU680123A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ РЕГУЛЯТОР СКОРОСТИДВИГАТЕЛЯ | 1967 |
|
SU198057A1 |
| Устройство для автоматическогоРЕгулиРОВАНия ТягОВОгО АСиНХРОННОгОэлЕКТРОпРиВОдА | 1978 |
|
SU799095A1 |
| Электропривод по системе генератор-двигатель с подчиненным регулированием | 1978 |
|
SU896732A1 |
| Устройство для стабилизации магнитного подвеса ротора | 1990 |
|
SU1744313A1 |
