(54) СЛЕДЯЩИЙ ПРИВОД
1
Изобретение относится к области машиностроения и агрегатостроения и может быть использовано преимупдественно в приводах промышленных манипуляторов, а также в отдельных случаях - в приводах станков с 4ПУ.
Суш,ествуют приводы станков с ЧПУ и промышленных манипуляторов на базе электрогидравлических усилителей с золотником осевого или поворотного перемещения гидромотором и шаговым электродвигателем в качестве задатчика. Эти приводы являются приводами дроссельного регулирования с импульсной системой ЧПУ 1.
Однако в таких приводах гидроусилитель момента с шаговым электродвигателем в качестве задатчика требует импульсной системы ЧПУ, при эксплуатации которой часто пропадают отдельные импульсы на программоносителе или в электроагрегатах системы управления. Естественно в дальнейшем они не отрабатываются. В результате этого образуется невосполнимая погрешность координаты перемещения, пропорциональная количеству пропавших импульсов.
Шаговые электродвигатели имеют высокую стоимость и сложны в эксплуатации.
Система управления пмеет высокую стоимость и сложность, обусловленную в частности тем, что значительную часть ее составляют усилители питания обмоток шагог вого двигателя, а также аналоговьин характером управления исполнительным элементом.
Целью изобретения является упрощение конструкции и системы управления, повыj шение надежности работы.
Это достигается тем, что задатчик выполнен в виде дискретного /г-поршневого гидроцилиндра, управляемого л релейными управляющими гидроаппаратами (распределителями) вместо шагового электродвигателя, связанного своим выходным штоком с осевым следящим золотником через редуктор, включающий две параллельно включенные муфты и пару винт- гайка.
Кроме того, релейные управляющие аппараты выполнены в виде гидропневмораспределителей.
Муфты выполнены электромагнитными.
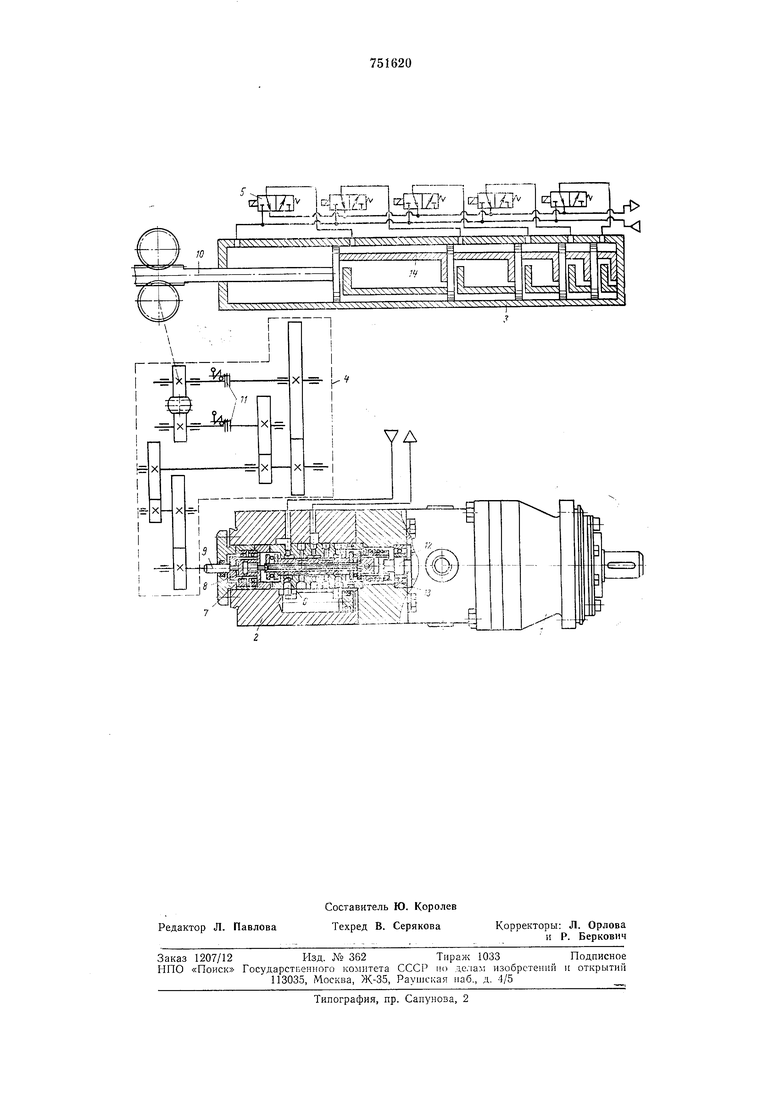
На чертел е приведена схема привода.
Привод состоит из гидравлического мотора 1, осевого следящего золотника 2, п-поршневого гидроцилиндра 3 (задатчика), редуктора 4 и заправляющих распределителей 5. Подвод рабочей жкдкоети к iio;iocTHM гидромотора 1 оеуществляетея от .проточек золотника 6, имеющего резьбоj5()ii штырь 7, входящий в гайку 8, евязаипую валом 9 с выходиым валом редуктора 2, входной вал которого св5Гзап со штоком 1U гндроцп;1)1Идра 3. Редуктор 4 еодержит две муфты 11 (например, )ома1ии иые). С ротором гидромотора 1 соедипеи вал 12, входящи в щлицевую втулку 13, сьязаиную ео штырел 7. Цил -1пдр 3 содержит п иоршне 14, причем ход каждого с,1едующего поршня в два раза больше хода предыдущего.
Привод работает следующим образом, По еигналам электричеекой системы управления релейно срабатывают в определенном сочетании гидравлические распределителн 5. В результате срабатывания поршней 14 происходит перемещение выходного штока 10 цилиндра 3 на определенную величину. Это перемещение через редуктор 4 нреооразуется во вращательное вала 9 п связанной с нп.м гайки и, в результате чего обеспечивает осевое емещенне золотника 6. В результате смещения золотника 6 маело из напорной маг;1страли поступает в ту или инуЮ нолость шдромотора 1, обесиечнвая вращение его ротора. При вращении последнего вал 12 п связанная с ним шлпцевая втулка 13 тоже поворачиваются, обеспечивая возврат :-;олотиика 6 в исйтральпое по.южение, т.е. ироизводнтея отработка команды задатчика- --гидроцилипдра 3.
Пеобходпмое направление вращення ва.ча 1Т-1Дромотора осуи,ествляется от системы уиравления избирательным включением той или иной муфты И. По окончании перемен;еиия штока 10 гидроцилнндра 3 в рабочее по;1ожеиие муфты 11 включаютея, и ироиз(зодитея реверс задатчика - гидроцилиндра 3 в исходное положение, иричем этот ревере производится автономно от золотника 2 и гидравлического мотора 1, что дает возможноеть полностью использовать все разряды задатчика для выио;1нения ноеледующих неремещеиий исиолнителвного элемента. Возможности задатчика завнсят от ко.гичества его разрядов (поршней) и равj/ы 1 (п -- количество разрядов).
Таким образом, предлагаемая слема реали:-;ует следящий разомкнутый гидропривод
(с внутренней обратной связью), причем релейпый характер управления задатчпком обеспечивает необходимые для промышленных манннуляторов точностные и динамические характеристики привода при иростой и дешевой системе уирав.лепия.
Формула изобретения
1.Следящий привод, выполненный в виДе гидравлического мотора и связанного с
его выходным валом осевого следящего золотника, перемещение которого задается задатчиком, отличающийся тем, что, с целью уирощення конструкции и еиетемы
управления, повышения падежноети работы, задатчнк выполнен в виде дискретного л-иоршиевого цилиндра, управляемого п релейными управляющими аппаратами, евязанного своим выходным штоком с осевым следящим золотником через редуктор, включающий две иараллельио включенные муфты и нару винт-гайка.
2.Привод поп. 1, о т л и ч а ю HI, и и е я тем, что релейные управляющпе аппараты
выполнены в виде гидро-иневмораспределителей.
3.Привод ио н. 1, от л и ч а гощ и и ся тем, что муфты выполнены электромагннгными.
Источники информации,
припятые во вннманпе ирп экспертизе 1. Лещепко В. А. Гидравлические еледяидие приводы стаиков с программным управлением. М., «Маш и-юстрое11не, 1975, с. 126, рис. 65.
ю
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящий привод подачи | 1979 |
|
SU795868A1 |
| Цифровой электрогидравлический привод | 1978 |
|
SU792002A1 |
| Пневмогидравлический позицион-Ный пРиВОд | 1979 |
|
SU795870A1 |
| Устройство для доворота и фиксации круглого стола станка | 1977 |
|
SU638448A1 |
| Гидрообъемная трансмиссия полно-пРиВОдНОгО ТРАНСпОРТНОгО СРЕдСТВА | 1976 |
|
SU823182A1 |
| ГИДРОПУЛЬСАЦИОННЫЙ ПРЕСС | 1991 |
|
RU2010658C1 |
| ЦИФРОВАЯ ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СЛЕДЯЩАЯ СИСТЕМА УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ ОБЪЕКТА | 2008 |
|
RU2374671C1 |
| Машина для контактной стыковой сварки | 1982 |
|
SU1103971A1 |
| ЦИФРОВАЯ ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СЛЕДЯЩАЯ СИСТЕМА УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ ОБЪЕКТА | 1998 |
|
RU2132080C1 |
| Рука промышленного робота | 1983 |
|
SU1174255A1 |