2. Автомат по п,1, отличающий с я тем, что механизм возврата-сбрасьшателя в исходное положение вьтолнен в виде пневмоцилиндра одностороннего действия, бесштоковая полость которого соединена о
бесштоковой полост ью направляющего механизма.
3. Автомат но п.1, отличающий с я тем, что щиток вьтолнен П-образной формы и закреплен на захвате-сбрасьшателе.
| название | год | авторы | номер документа |
|---|---|---|---|
| Автомат для резки и зачистки изоляции скрученных пар проводов | 1982 |
|
SU1086491A1 |
| Автомат мерной резки и зачистки скрученных пар проводов | 1987 |
|
SU1520615A1 |
| Станок-автомат для двусторонней гибки труб | 1980 |
|
SU897331A1 |
| Автомат для резки и зачистки изоляции скрученных пар проводов | 1988 |
|
SU1658261A1 |
| Станок для обработки труб | 1983 |
|
SU1144806A1 |
| Агрегат для зачистки концов труб | 1989 |
|
SU1717297A1 |
| Установка для обработки проката | 1978 |
|
SU782913A1 |
| Устройство для поштучной выдачи длинномерных заготовок | 1983 |
|
SU1142376A1 |
| Автоматизированный комплекс для обработки труб | 1986 |
|
SU1428532A1 |
| Автомат для нарезания резьбы в круглых шлицевых гайках | 1977 |
|
SU707763A1 |
1. АВТОМАТ ДЛЯ РЕЗКИ И ЗА:ЧИСТКИ ИЗОЛЯЦИИ СКРУЧЕННЫХ ПАР ПРОВОДОВ по авт. св. № 1086491, отличающийся тем, что, с целью обеспечения надежности в работа путем гарантированного попадания обрабатьшаемого провода в захват-сбрасыватель, последний вьшолнен в виде пневмоцилиндра одностороннего действия, внутри которого расположена возвратная пружина, планки, закрепленной на штоке, и лапок, шарнирно установленных на пневмоцилиндре и шарнирно связанных через тяги с концами планки, при этом захват-сбрасьшатйль установлен на направляющем элементе с возможностью продольного перемещения и снабжен механизмом возврата его в исходное положение.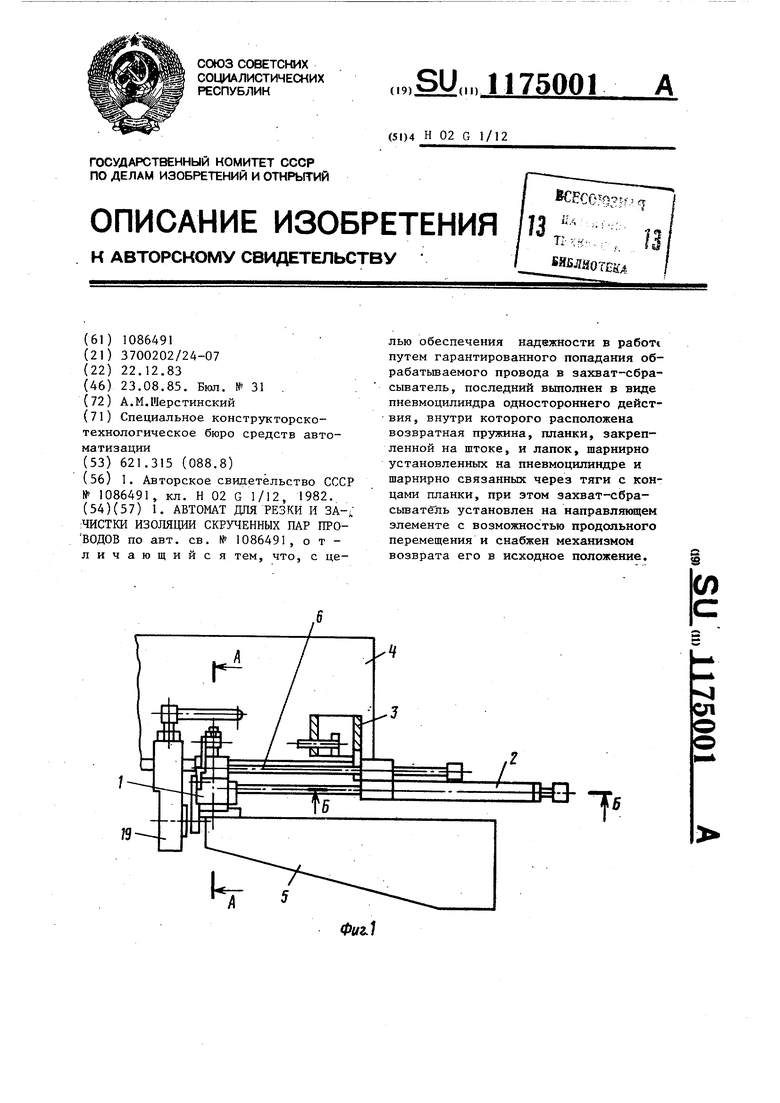
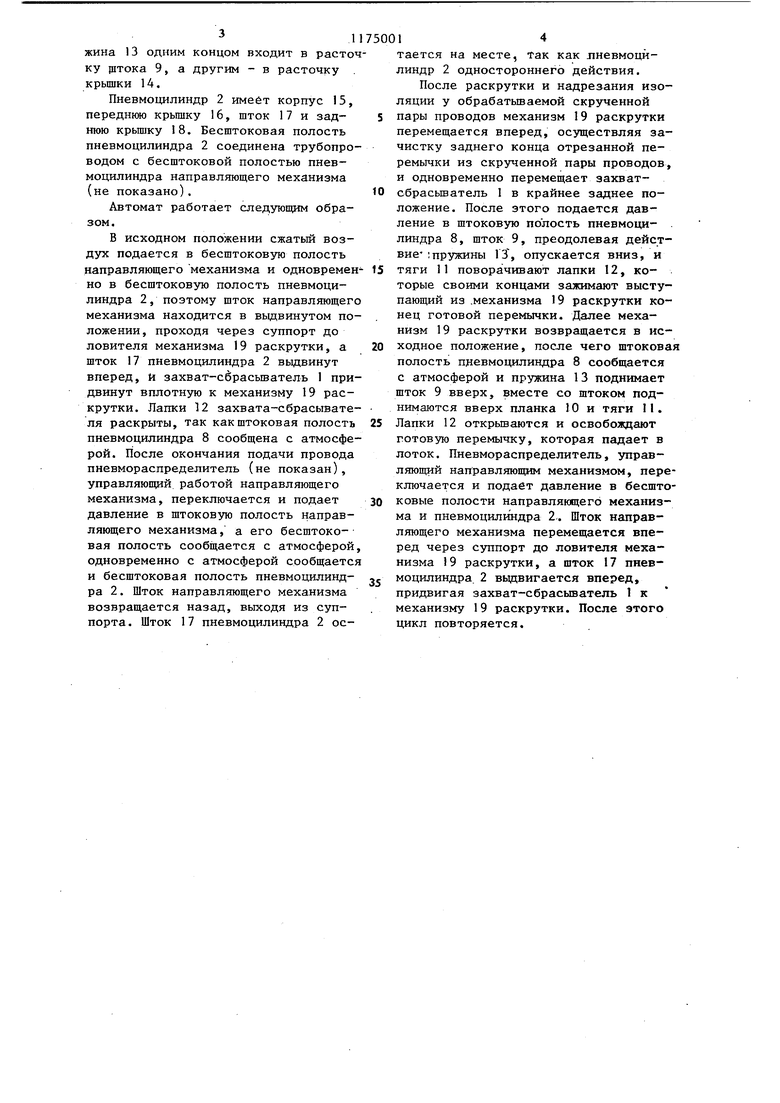
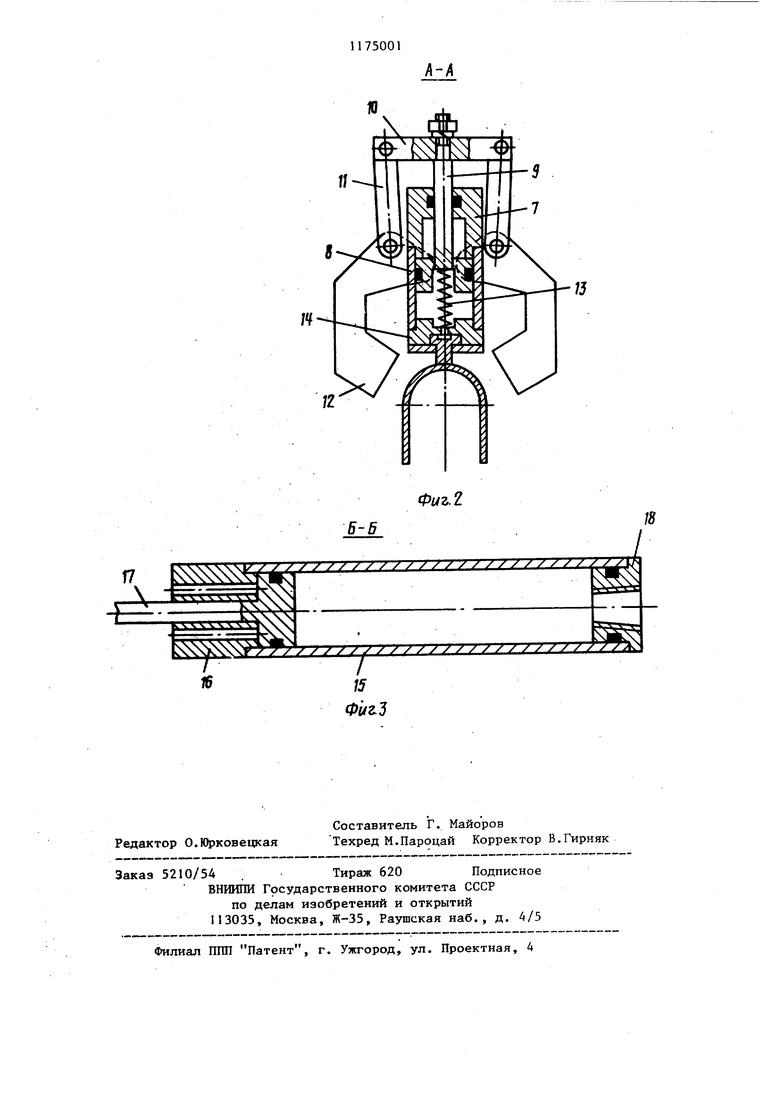
Изобретение относится к технологическому оборудованию для подготовки электрических проводов к монтажу, используемому в приборостроительной, электротехнической, радиотехнической промьшшенности. . По основному авт. св. № 1086491 известен автомат для резки и зачистки изоляции скрученных пар проводов, содержащий станину, на которой носледовательно установлены и связаны с приводами механизм зачистки, механизм подачи, направляющий механизм, суппорт с отрезными и подрезными ножами, механизм раскрутки и захватсбрасыватель, причем механизмы зачистки и раскрутки установлены с возможностью возвратно-поступательkoro перемещения вдоль направления подачи привода П .. Однако в известном техническом решении захват-сбрасыватель на станине неподвижно и для обеспечения достаточно большой длины зачистки между ним и механизмом раскрутки име ется зазор. Это приводит к тому, что подаваемый провод, выходя из механиз ма раскрутки и отклоняясь в силу раз личных причин, может не попасть под лапки захвата-сбрасьшателя. Целью изобретения является обеспечение надежности автомата в работе путем гарантированного попадания обрабатьшаемого провода в захват-сбрасьтатель. Поставленная цель достигается тем что в автомате для резки и зачистки изоляции скрученных пар проводов захват-сбрасыватель выполнен в виде пневмоцилиндра одностороннего деистВИЯ, внутри которого расположена воз вр 1тная пруткина . планки, закрепленно А штоке, и лапок, шарнирно установленных на пневмоцилиндре и шарнирно связанных через тяги с концами планки, при этом захват-сбрасьшатель установлен на направляющем элементе с возможностью продольного перемещения и снабжен механизмом возврата его в исходное положение. Последний вьтолнен в виде пневмоцилиндра одностороннего действия, бесштоковая полость которого соединена с бесштоковой полостью направляющего механизма. Кроме того, щиток вьтолнен П-образнрй формы и закреплен на захватесбрасьшателе. На фиг.1 изображен захват-сбрасыватель, общий вид (крепление к станине автомата); на фиг.2 - разрез А-А . на фиг.1; на фиг.3 - разрез Б-Б на фиг.1. Захват-сбрасьшатель 1 жестко связан со щтоком пневмоцилиндра 2, который с помощью кронштейна 3 закреплен на станине 4. К захвату-сбрасьгеателю : прикреплен U-образный щиток 5, открытый вниз. Цилиндрический направляющий элемент 6 имеет сквозное отверстие и одним концом закреплен в расточке верхней крьщжи 7 захвата-сбрасывателя, другой конец направляющего элемента проходит через сквозное отверстие передней крьш1ки пневмоцилиндра 2. Направляющий элемент служит для фиксации or проворота захвата-сбрасьшателя вокруг оси пневмоцилиндра 2 и для подвода сжатого воздуха и щтоковую полость пневмоцилиндра 8 захватасбрасьшателя . Шток 9 соединен с планкой 10, к концам которой щарнирно присоединены концы тяг 11. Свободные концы тяг шарнирно соединены с лапками 12, шарнирно установленными на пневмоцилиндре 8. Возвратная пру 1 жина 13 одним концом входит в расто ку щтока 9, а другим - в расточку . крьпики 14. Пневмоцилиндр 2 имебт корпус 15, переднюю крышку 16, шток 17 и заднюю крьшку 18. Бесштоковая полость пневмоцилиндра 2 соединена трубопро водом с бесштоковой полостью пневмоцилиндра направляющего механизма (не показано). Автомат работает следующим образом. В исходном положении сжатый воздух подается в бесштоковую полость направляющего механизма и одновремен но в бесштоковую полость пневмоцилиндра 2, поэтому шток направляющег механизма находится в выдвинутом по ложении, проходя через суппорт до ловителя механизма 19 раскрутки, а шток 17 пневмоцилиндра 2 вьщвинут вперед, и захват-сёрасыватель 1 при двинут вплотную к механизму 19 раскрутки. Лапки 12 захвата-сбрасывате ля раскрыты, так какштоковая полость пневмоцилиидра 8 сообщена с атмосфе рой. После окончания подачи провода пневмораспределитель (не показан), управляющий работой направляющего механизма, переключается и подает давление в щтоковую полость направляющего механизма, а его бесштоковая полость сообщается с атмосферой одновременно с атмосферой сообщаетс и бесштоковая полость пневмоцилиндра 2. Шток направляющего механизма возвращается назад, выходя из суппорта . Шток 17 пневмоцилиндра 2 ос14тается на месте, так как лневмоцйлиндр 2 одностороннего действия. После раскрутки и надрезания изоляции у обрабатьшаемой скрученной пары проводов механизм 19 раскрутки перемещается вперед, осуществляя зачистку заднего конца отрезанной перемьтки из скрученной пары проводов, и одновременно перемещает захватсбрасьшатель 1 в крайнее заднее положение. После этого подается давление в штоковую полость пневмоцилиндра 8, шток 9, преодолевая действие пружины 13, опускается вииз, и тяги 11 поворачивают лапки 12, которые своими концами зажимают выступающий из .механизма 19 раскрутки конец готовой перемычки. Далее механизм 19 раскрутки возвращается в исходное положение, после чего штоковая полость превмоцилиндра В сообщается с атмосферой и пружина 13 поднимает шток 9 вверх, вместе со щтоком поднимаются вверх планка 10 и тяги 11. Лапки 12 открьшаются и освобождают готовую перемычку, которая падает в лоток. Пневмораспределитель, управляющий направляющим механизмом, переключается и подает давление в бесштоковые полости направляющего механизма и пневмоцилиндра 2.. Шток направляющего механизма перемещается вперед через суппорт до ловителя механизма 19 раскрутки, а шток 17 пневмоцилиндра. 2 выдвигается вперед, придвигая захват-сбрасыватель 1 к механизму 19 раскрутки. После этого цикл повторяется.
12 X
Фиг.2
№
6-6
I
I Х///////Х/ХхХХ/ХХххХ ХХХ/Х/Х//ХХ///Х////ХХХ /5 Фиг.3
