(54) СТАНОК-АВТОМАТ ДЛЯ ДВУСТОРОННЕЙ ГИБКИ ТРУБ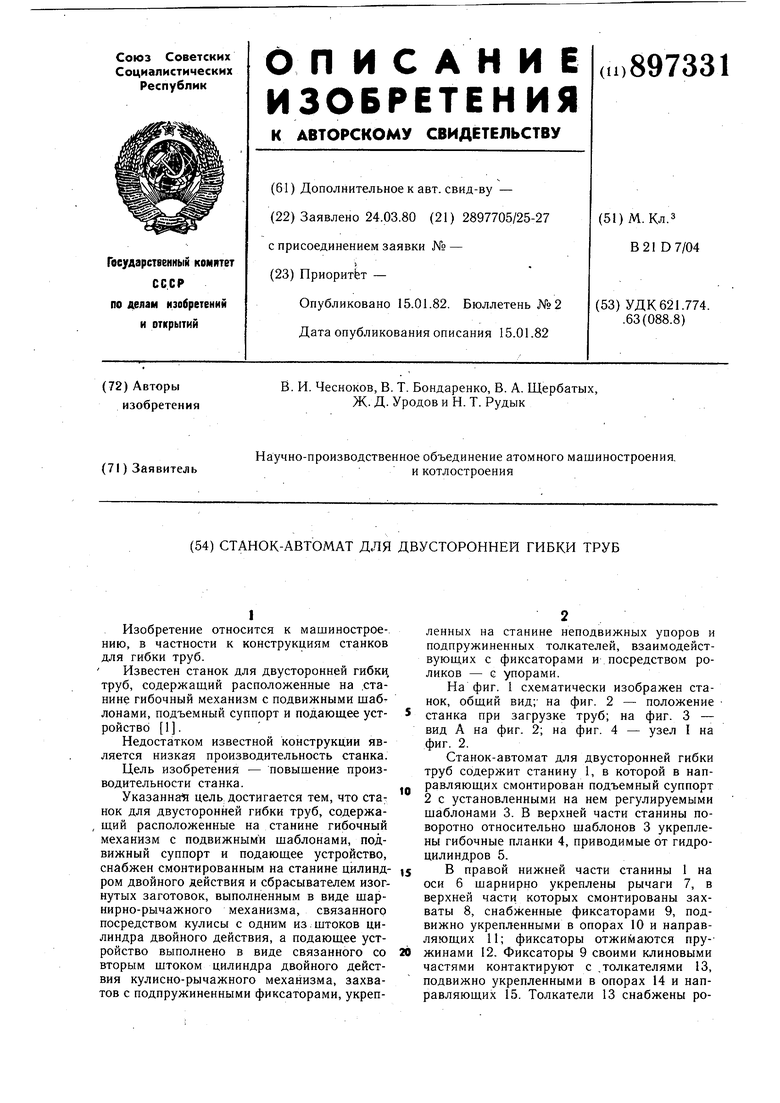
| название | год | авторы | номер документа |
|---|---|---|---|
| Станок для двусторонней гибки труб | 1979 |
|
SU797819A1 |
| Станок для двухсторонней гибки труб | 1973 |
|
SU501802A1 |
| Станок-автомат для двусторонней гибки труб | 1985 |
|
SU1271611A1 |
| Станок для двусторонней гибки труб | 1987 |
|
SU1523215A1 |
| Станок для двусторонней гибки труб | 1984 |
|
SU1156768A2 |
| Станок для гибки змеевиков | 1990 |
|
SU1726091A1 |
| Станок для гибки змеевиков | 1980 |
|
SU935162A1 |
| Станок для гибки змеевиков | 1986 |
|
SU1411075A1 |
| Станок для гибки змеевиков | 1985 |
|
SU1248692A1 |
| Станок для гибки змеевиков | 1984 |
|
SU1207562A2 |
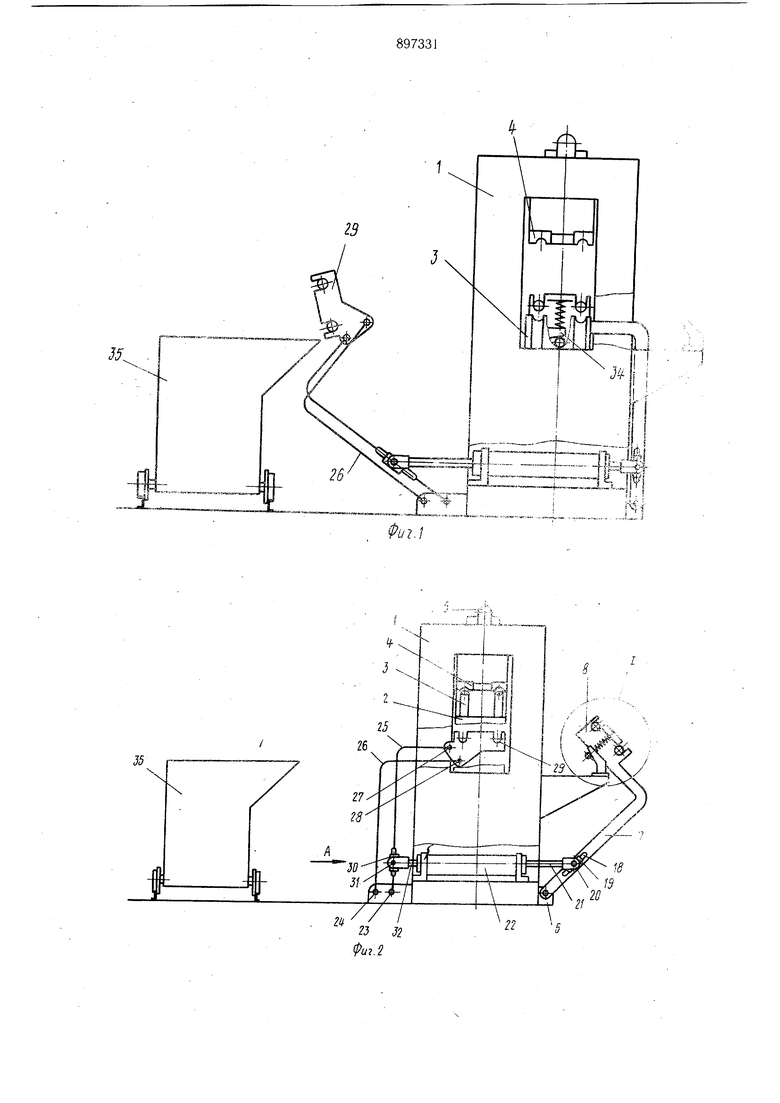
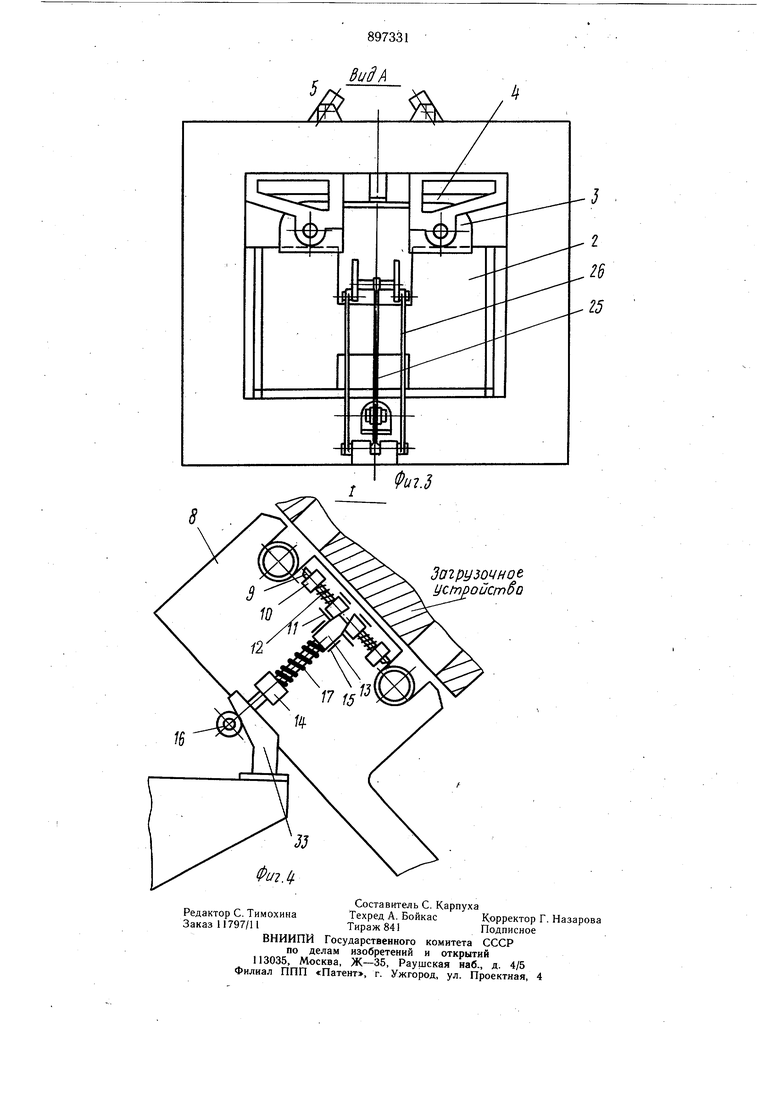
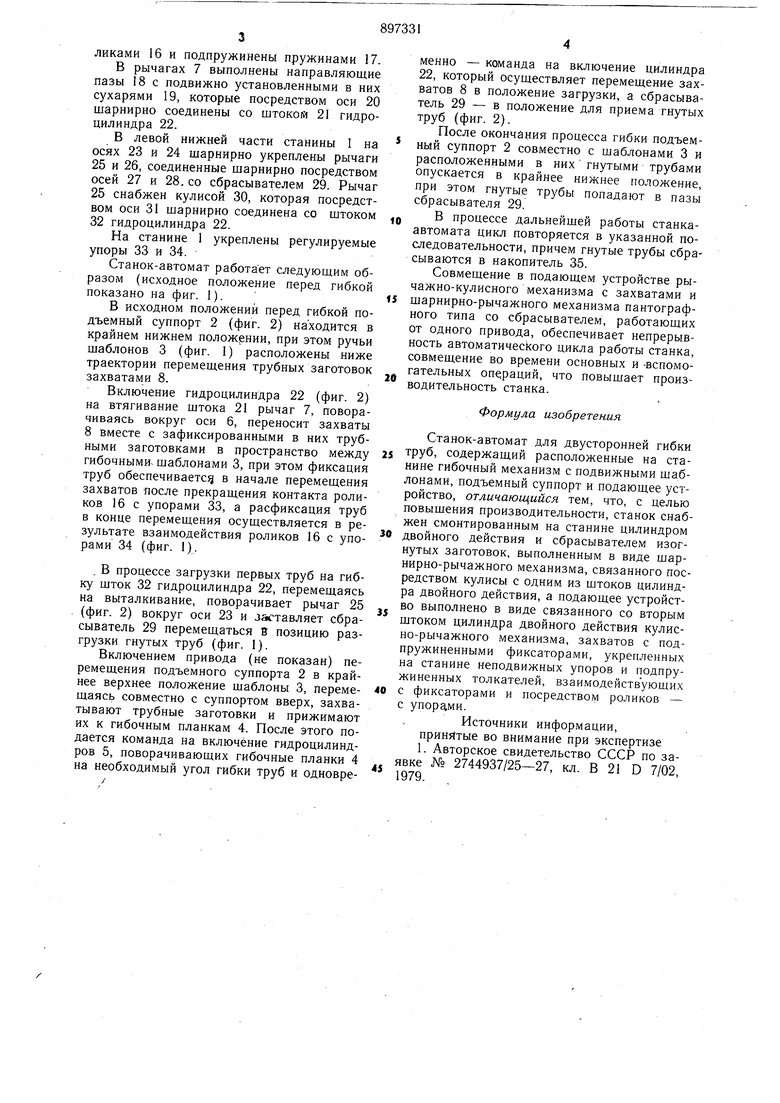
Изобретение относится к машиностроению, в частности к конструкциям станков для гибки труб. Известен станок для двусторонней гибки, труб, содержаш,ий расположенные на станине гибочный механизм с подвижными шаблонами, подъемный суппорт и подающее устройстве 1 . Недостатком известной конструкции является низкая производительность станка. Цель изобретения - повышение производительности станка. Указанна цель достигается тем, что станок для двусторонней гибки труб, содержащий расположенные на станине гибочньш механизм с подвижными щаблонами, подвижный суппорт и подающее устройство, снабжен смонтированным на станине цилиндром двойного действия и сбрасывателем изогнутых заготовок, выполненным в виде щарнирно-рычажного механизма, связанного посредством кулисы с одним из.штоков цилиндра двойного действия, а подающее устройство выполнено в виде связанного со вторым штоком цилиндра двойного действия кулисно-рычажного механизма, захватов с подпружиненными фиксаторами, укрепленных на станине неподвижных упоров и подпружиненных толкателей, взаимодействующих с фиксаторами и посредством роликов - с упорами. На фиг. 1 схематически изображен станок, общий вид;- на фиг. 2 - положение станка при загрузке труб; на фиг. 3 - вид А на фиг. 2; на фиг. 4 - узел I на фиг. 2. Станок-автомат для двусторонней гибки труб содержит станину 1, в которой в направляющих смонтирован подъемный суппорт 2 с установленными на нем регулируемыми шаблонами 3. В верхней части станины поворотно относительно шаблонов 3 укреплены гибочные планки 4, приводимые от гидроцилиндров 5. В правой нижней части станины 1 на оси 6 шарнирно укреплены рычаги 7, в верхней части которых смонтированы захваты 8, снабженные фиксаторами 9, подвижно укрепленными в опорах 10 и направляющих 11; фиксаторы отжимаются пружинами 12. Фиксаторы 9 своими клиновыми частями контактируют с .толкателями 13, подвижно укрепленными в опорах 14 и направляющих 15. Толкатели 13 снабжены роликами 16 и подпружинены пружинами 17.
В рычагах 7 выполнены направляющие пазы 18 с подвижно установленными в них сухарями 19, которые посредством оси 20 шарнирно соединены со штокой 21 гидроцилиндра 22.
В левой нижней части станины 1 на осях 23 и 24 шарнирно укреплены рычаги 25 и 26, соединенные шарнирно посредством осей 27 и 28.со сбрасывателем 29. Рычаг 25 снабжен кулисой 30, которая посредством оси 31 шарнирно соединена со штоком 32 гидроцилиндра 22.
На станине 1 укреплены регулируемые упоры 33 и 34.
Станок-автомат работает следующим образом (исходное положение перед гибкой показано на фиг. 1).
В исходном положений перед гибкой подъемный суппорт 2 (фиг. 2) находится в крайнем нижнем положении, при этом ручьи шаблонов 3 (фиг. 1) расположены ниже траектории перемещения трубных заготовок захватами 8.
Включение гидроцилиндра 22 (фиг. 2) на втягивание штока 21 рычаг 7, поворачиваясь вокруг оси 6, переносит захваты 8 вместе с зафиксированными в них трубными заготовками в пространство между гибочными, шаблонами 3, при этом фиксация труб обеспечиваете в начале перемещения захватов после прекращения контакта роликов 16 с упорами 33, а расфиксация труб в конце перемещения осуществляется в результате взаимодействия роликов 16 с упорами 34 (фиг. 1).
, В процессе загрузки первых труб на гибку шток 32 гидроцилиндра 22, перемещаясь на выталкивание, поворачивает рычаг 25 , (фиг. 2) вокруг оси 23 и заставляет сбрасыватель 29 перемещаться S позицию разгрузки гнутых труб (фиг. 1).
Включением привода (не показан) перемещения подъемного суппорта 2 в крайнее верхнее положение шаблоны 3, Перемещаясь совместно с суппортом вверх, захватывают трубные заготовки и прижимают их к гибочным планкам 4. После этого подается команда на включение гидроцилиндров 5, поворачивающих гибочные планки 4 на необходимый угол гибки труб и одновременно - команда на включение цилиндра 22, который осуществляет перемещение захватов 8 в положение загрузки, а сбрасыватель 29 - в положение для приема гнутых труб (фиг. 2).
После окончания процесса гибки подъемный суппорт 2 совместно с шаблонами 3 и расположенными в них гнутыми трубами опускается в крайнее нижнее положение, при этом гнутые трубы попадают в пазы сбрасывателя 29.
В процессе дальнейшей работы станкаавтомата цикл повторяется в указанной последовательности, причем гнутые трубы сбрасываются в накопитель 35.
Совмещение в подающем устройстве рычажно-кулисного механизма с захватами и шарнирно-рычажного механизма пантографного типа со сбрасывателем, работающих от одного привода, обеспечивает непрерывность автоматического цикла работы станка, совмещение во времени основных и -вспомогательных операций, что повышает производительность станка.
Формула изобретения
Станок-автомат для двусторонней гибки труб, содержащий расположенные на станине гибочный механизм с подвижными шаблонами, подъемный суппорт и подающее устройство, отличающийся тем, что, с целью повышения производительности, станок снабжен смонтированным на станине цилиндром двойного действия и сбрасывателем изогнутых заготовок, выполненным в виде шарнирно-рычажного механизма, связанного посредством кулисы с одним из штоков цилиндра двойного действия, а подающее устройство выполнено в виде связанного со вторым штоком цилиндра двойного действия кулисно-рычажного механизма, захватов с подпружиненными фиксаторами, укрепленных на станине неподвижных упоров и подпружиненных толкателей, взаимодействующих с фиксаторами и посредством роликов - с упорами.
Источники информации, во внимание при экспертизе 1. Авторское свидетельство СССР по заявке № 2744937/25-27, кл. В 21 D 7/02, 1979.
4
LA
