Изобретение относится к схватам роботов, в частности к электростатическим захватывающим и крепежным устройствам, и может быть использовано в машино- и приборостроении, радиоэлектронной промышленности для выполнения широкого перечня манипуляционных заданий с листовыми материалами и плоскими деталями типа пластин.
Целью изобретения является обеспечение надежности захвата деталей за счет создания заданного эффективного потенциального рельефа в электростимулированном адгезионном контакте (ЭАК) и сохранения стабильного значения количества разноименных зарядов на границе раздела полупроводящая подложка - полимерная пленка - закрепляемая деталь.
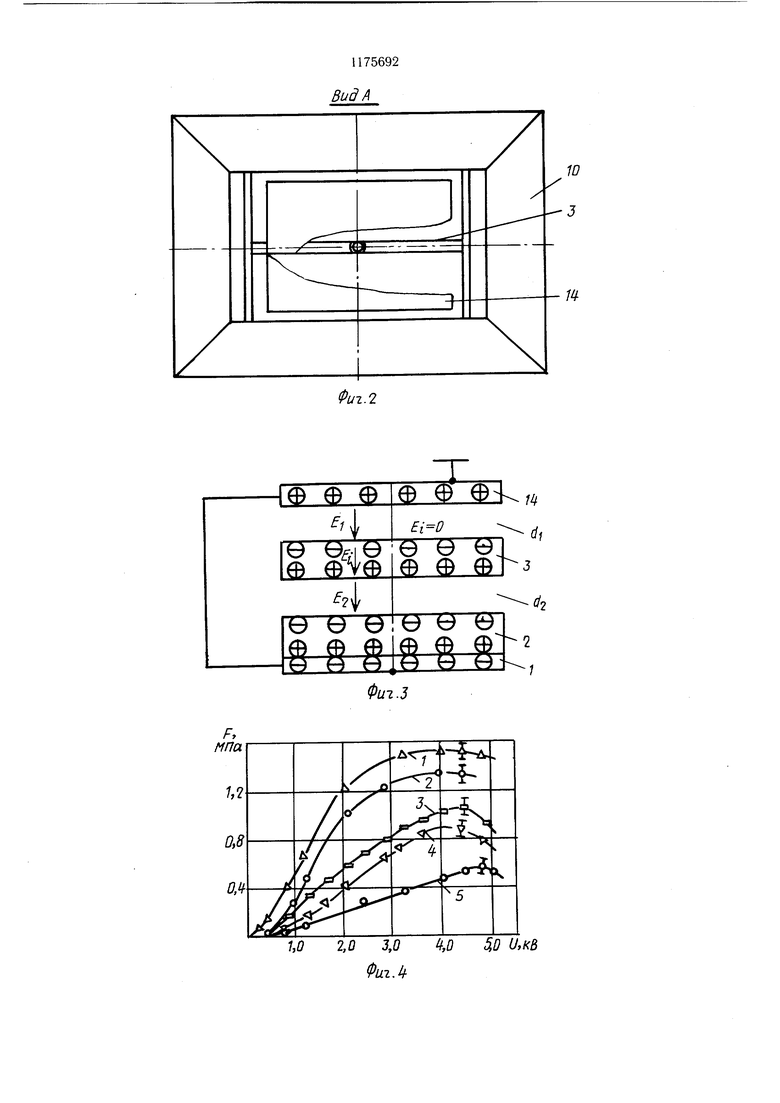
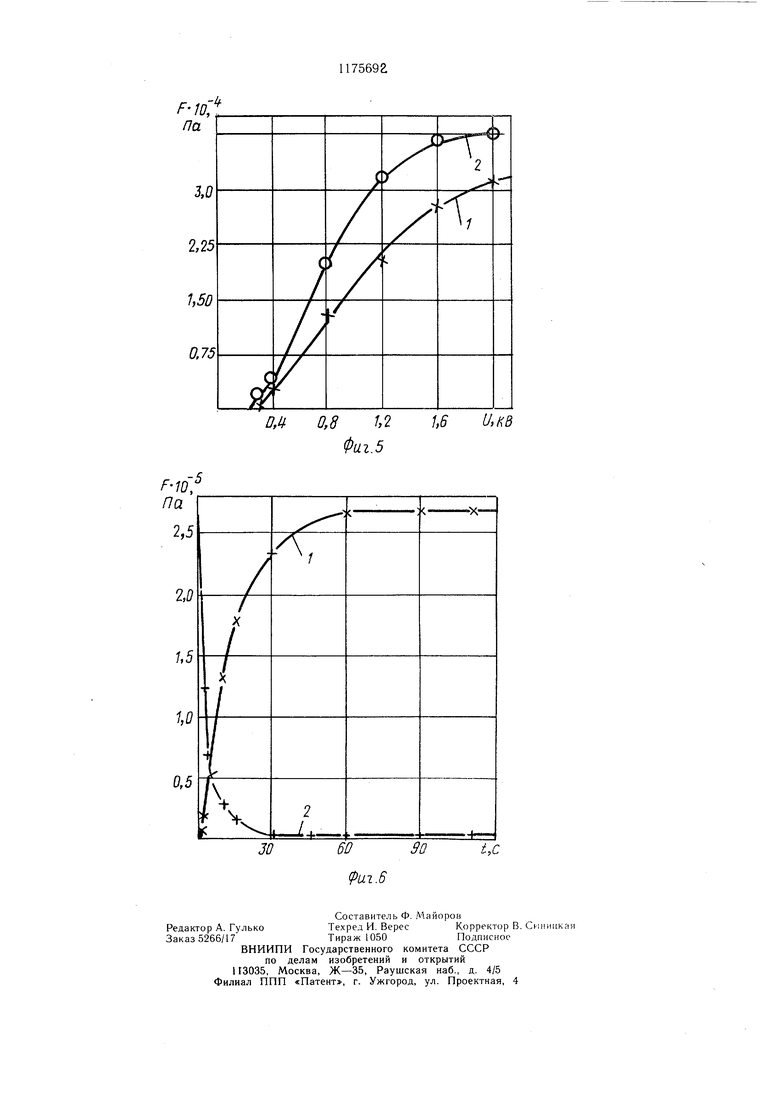
На фиг. 1 изображен схват, разрез; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - схема распределения электростатического поля в установившемся режиме при закороченном ЭАК и отключенном источнике питания; на фиг. 4 и 5 - зависимости усилия захвата F от напряжения питания U; на фиг. 6 - то же, от времени релаксации заряда.
Схват содержит металлическое основание 1, на котором укреплена подложка 2 из полупроводящего электрический ток материала. Поверхность полупроводящей подложки 2 покрыта полимерной пленкой 3. В металлическом основании 1 по оси схвата установлен игольчатый электрод 4, отделенный от основания изоляцией 5 и подпружинен к нему пружиной 6. Электрод 4 заземлен и через резистор 7 соединен с металлическим основанием 1. В подложке и пленке выполнен паз для прохода электрода. Высоковольтный полюс источника 8 напряжения через коммутатор 9 соединен с основанием 1, а второй полюс источника 8 заземлен. В диэлектрическом корпусе 10 размещены камеры 11 с кассетами 12 для восстановления использованной пленки 3 и программное устройство 13, соединенное с коммутатором 9 и камерами И. Позицией 14 обозначена захватываемая деталь.
Схват работает следующим образом.
Для захвата детали 14 поверхность схвата, покрытую полимерной пленкой.3, приводят в контакт с деталью. При этом электрод 4 находится в постоянном контакте с деталью через паз в пленке 3. По команде с
программного устройства 13 через коммутатор 9 от источника 8 на ЭАК подложка - полимер - деталь подается напряжение. В ЭАК возникает усилие F электростатического взаимодействия, закрепляющее деталь на подложке схвата. При этом с деталью выполняют необходимый перечень манипуляционных заданий.
Для работы схвата в более экономичном энергетическом режиме по команде с программного устройства после захвата детали источник 8 напряжения может быть отключен. В таком случае усилие F определяется напряженностью Е внещнего электрического поля пленки 3. Расположение элементов в
5 схвате можно условно рассматривать как два плоских конденсатора, одной из обкладок которых является поверхность полимерной пленки, другой - закрепляемая деталь и полупроводящая подложка (фиг. 3). При закорачивании обкладок конденсаторов происходит компенсация зарядов обкладок, а усилие захвата детали определяется стабильным взаимодействием гомозаряда (заряда совпадающего по знаку с зарядом прилегающих электродов) полимерной
5 пленки с зарядами, индуцированными им на обкладках конденсатора (фиг. 3). В этом случае напряженность Ej внутреннего поля в диэлектрике равна нулю, а усилие захвата определяется напряженностью Е и Ej электрических полей в зазорах d и dj.
0 Для открепления детали (одновременно с выключением источника напряжения) на ЭАК подается компенсирующая разность потенциалов противоположной полярности рабочему напряжению длительностью не более 1 с. При этом усилие F захвата в течение долей секунды спадает до нулевого значения, и деталь открепляется от подложки схвата.
По команде с программного устройства происходит перемещение на закрепляющую
0 поверхность подложки схвата нового участка полимерной пленки. В камерах 11 при комбинированном воздействии повышенной температуры, влажности и тлеющего электрического разряда происходит быстрая релаксация остаточного электретного заряда, резко снижающего величину и стабильность усилия F захвата. Восстановленная и очищенная от загрязнений в камере 11 полимерная пленка наматывается на кассету 12 для дальнейшего использования.
ID 3
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват манипулятора | 1985 |
|
SU1320057A1 |
| Схват манипулятора | 1980 |
|
SU944921A1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ЭЛЕКТРОСТАТИЧЕСКОГО УСТРОЙСТВА ДЛЯ КРЕПЛЕНИЯ ДЕТАЛЕЙ ИЗ НЕМАГНИТНЫХ МАТЕРИАЛОВ | 1990 |
|
RU2016735C1 |
| ЭЛЕКТРОСТАТИЧЕСКОЕ ЗАКРЕПЛЯЮЩЕЕ УСТРОЙСТВО | 1990 |
|
RU2027584C1 |
| Схват робота | 1991 |
|
SU1821360A1 |
| ЭЛЕКТРОСТАТИЧЕСКИЙ УЛОВИТЕЛЬ МЕЛКОДИСПЕРСНЫХ ПОРОШКОВ | 1997 |
|
RU2120337C1 |
| Электростатическое крепежное устройство | 1973 |
|
SU454654A1 |
| Электростатический захват | 1987 |
|
SU1451000A1 |
| Устройство для нанесения порошкообразных материалов | 1973 |
|
SU459262A1 |
| Электростатическая машина | 1983 |
|
SU1173512A1 |
СХВАТ РОБОТА, содержащий металлическое основание, подложку из полупроводникового материала, укрепленную на основании и покрытую поли.мерной пленкой, и источник напряжения, один полюс которого заземлен, отличающийся тем. что, с полью обеспечения надежности захвага дета лей, он снабжен резистором, коммутатором и по крайней мере одним игольчатым электродом, установленным по оси схЕ5ата в основании, подпружинершым к нему и изо.мпрованным от него, при этом в подложке и. полимерной пленке выполнен паз для прохода электрода, электрод заземлен и подключен к основанию через резистор, а основание соединено через коммутатор с другим по.посом источника напряжения. (Л Г2 СП 05 со 1С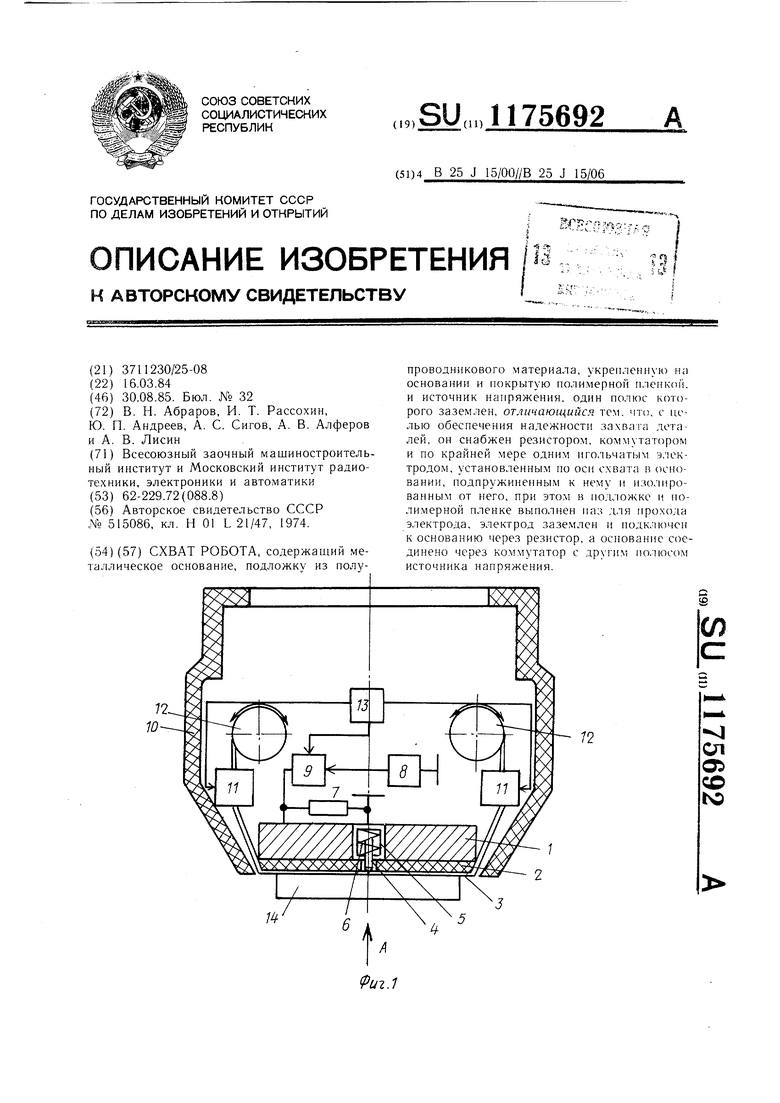
1,0 2,0 3,0 ,0 50 U,KB Фиг Л
0,1 0,8 1,6 и, к 8 Фиг.5
| Способ проверки программы работы обрабатывающего станка и системы станок-приспособление-инструментдеталь(спид) | 1973 |
|
SU515086A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
