Изобретение относится к производству изделий электронной техники, в частности к средствам захвата и закрепления, используемым для выполнения Манипуляций с плоскими проводящими и полу про водящими деталями, при производстве полупров.Одни- ковых приборов И интегральных микросхем.
Целью изобретения является повышение быстродействия и надежности захвата и открепления деталей электроадгезион- ным закрепляющим устройством, путем создания акустических колебаний его поверхности в момент контакта с поверхностью закрепляемой детали (ЗД).
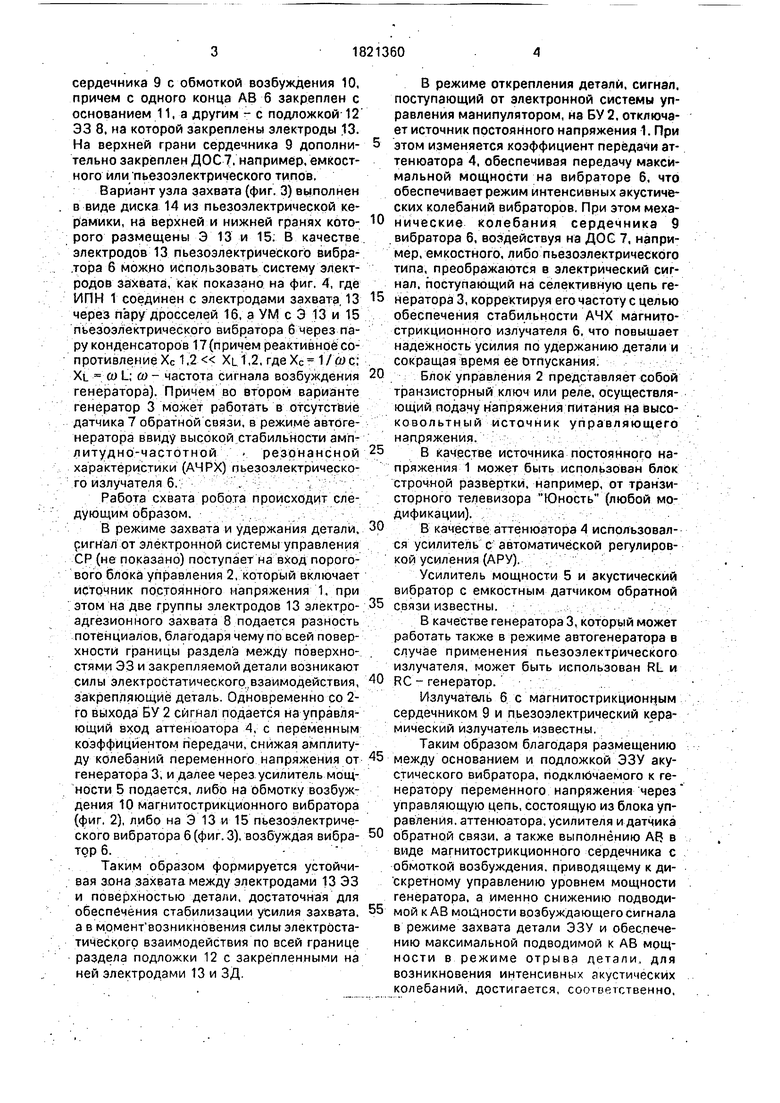
На фиг. 1 представлена блок-схема схвата робота (иупр- - управляющий сигнал от системы управления манипулятором): на фиг. 2 изображен узел захвата СР. акустический вибратор которого выполнен в виде магнитострикционного сердечника: фронтальная проекция и вид А: на фиг. 3 - то же, .
но акустический вибратор выполнен в виде диска из пьезоэлектрического материала: фронтальная поверхность и вид В; на фиг. 4 изображена электрическая схема соединения электродов узла захвата, изображаемого на фиг. 3, с выходами блоков постоянного и переменного напряжений.
Схват робота содержит последовательно соединенные источник постоянного напряжения 1, блок управления 2, генератор 3. аттенюатор 4 с переменным коэффициентом передачи, усилитель мощности 5, и узел захвата 9, состоящий из акустического вибратора 6. датчика обратной связи 7 и элект- роадгезионного захвата 8, причем датчик обратной связи 7 закреплен на вибраторе 6, выход которого соединен с селективной цепью генератора 3 переменного напряжения.
Узел захвата (фиг. 2) содержит АВ 6. выполненный в виде магнитострикционного
СО
ю
СлХ
о о
сердечника 9 с обмоткой возбуждения 10, причем с одного конца АВ б закреплен с основанием 11, а другим - с подложкой 12 ЭЗ 8, на которой закреплены электроды 13. На верхней грани сердечника 9 дополнительно закреплен ДОС 7. например, емкостного или пьезоэлектрического типов,
Вариант узла захвата (фиг. 3) выполнен в виде диска 14 из пьезоэлектрической керамики, на верхней и нижней гранях которого размещены Э 13 и 15: В качестве, электродов 13 пьезоэлектрического вибратора б можно использовать систему электродов захвата, как показано на фиг. 4, где ИПН 1 соединен с электродами захвата, 13 через пару дросселей 16, а УМ с Э 13 и 15 пьезоэлектрического вибратора б через пару конденсаторов 17 (причем реактивное сопротивление Хс 1,2« Хи 1,2. гдеХс 1/ш.с;; XL(О L; й -частота сигнала возбуждения генератора). Причем во втором варианте генератор 3 может работать в отсутствие датчика 7 обратной связи, в режиме автогенератора ввиду высокой стабильности амплитудно-частотной резонансной характеристики (АЧРХ) пьезоэлектрического излучателя 6. . v . V
Работа схвата робота происходит следующим образом.. . ,.
В режиме захвата и удержания детали, сигнал от электронной системы управления СР (не показано) поступает на вход порогового блока управления 2, который включает источник постоянного напряжения 1, при этом на две группы электродов 13 электро-, адгезионного захвата 8 подается разность потенциалов, благодаря чему по всей поверхности границы раздела между поверхностями ЭЗ и закрепляемой детали возникают силы электростатического.взаимодействия, закрепляющие деталь. Одновременно со 2- го выхода БУ 2 сигнал подается на управляющий вход аттенюатора 4, с переменным коэффициентом передачи, снижая амплитуду колебаний переменного напряжения от генератора 3, и далее через усилитель мощности 5 подается, либо на обмотку возбуждения 10 магнитострикционного вибратора (фиг. 2), либо на Э 13 и 15 пьезоэлектрического вибратора 6 (фиг. 3), возбуждая вибратор 6.. - . Таким образом формируется устойчивая зона захвата между электродами 13 ЭЗ и поверхностью детали, достаточная для обеспечения стабилизации усилия захвата, а в момент возникновен.ия силы электростатического взаимодействия по всей границе раздела подложки 12 с закрепленными на ней электродами 13 и ЗД.
В режиме открепления детали, сигнал, поступающий от электронной системы управления манипулятором, на БУ 2, отключает источник постоянного напряжения 1. При
этом изменяется коэффициент передачи аттенюатора 4, обеспечивая передачу максимальной мощности на вибраторе б, что обеспечивает режим интенсивных акустических колебаний вибраторов. При этом меха0 нические колебания сердечника 9 вибратора 6, воздействуя на ДОС 7, например, емкостного, либо пьезоэлектрического типа, преображаются в электрический сигнал, поступающий на селективную цепь ге5 нератора 3, корректируя его частоту с целью обеспечения стабильности АЧХ магнитострикционного излучателя 6, что повышает надежность усилия по удержанию детали и сокращая время ее отпускания;
0 Блок управления 2 представляет собой транзисторный ключ или реле, осуществляющий подачу напряжения питания на высоковольтный источник управляющего напряжения.: ;:
5 в качестве источника постоянного напряжения 1 может быть использован блок строчной развёртки, например, от транзисторного телевизора Юность (любой модификации)...
0 в качестве аттенюатора 4 использовался усилитель с автоматической регулировкой усиления (АРУ). .
Усилитель мощности 5 и акустический вибратор с емкостным датчиком обратной
5 связи известны......:, , .
В качестве генератора 3, который может работать также в режиме автогенератора в случае применения пьезоэлектрического излучателя, может быть использован RL и
0 RC- генератор.
Излучатель 6 с магнитострикционцым сердечником 9 и пьезоэлектрический керамический излучатель известны.
Таким образом благодаря размещению
5 между основанием и подложкой ЭЗУ акустического вибратора, подключаемого к генератору переменного напряжения через управляющую цепь, состоящую из блока управления, аттенюатора, усилителя и датчика
0 обратной связи, а также выполнению А8. в виде магнитострикционного сердечника с обмоткой возбуждения, приводящему к ди- скретному управлению уровнем мощности генератора, а именно снижению подводи5 мой кАВ мощности возбуждающего сигнала в режиме захвата детали ЭЗУ и обеспечению максимальной подводимой к АВ мощности в режиме отрыва детали, для возникновения интенсивных акустических колебаний, достигается, соответственно,
повышение стабильности удерживающего усилия детали, а также быстрого освобождения детали от захвата, что в конечном счете повышает быстродействие и надежность за- хвата и удержания детали.
Выполнение акустического вибратора в виде диска из пьезоэлектрического материала, на нижней стороне которого закреплены электроды захвата, а на верхней - закреплен дополнительный электрод, сое- диненные через усилитель с генератором переменного напряжения через разделительные конденсаторы и дроссели, позволяет упростить конструкцию и уменьшить габариты устройства, благодаря отказу от сложной конструктивной цепи, состоящей из магнитосТрикционного сердечника с закрепленным на нем датчиком обратной связи. . : ..ч. Л
Кроме того, применение в качестве аку- стического вибратора, например, АВ пьезоэлектрического типа, обладающего более стабильной амплитудно-частотной резонансной характеристикой, позволяет, отказавшись от датчика обратной связи. использовать генератор переменного напряжения в режиме автогенераций.
Формула изобретения
1. Схват робота, содержащий основа- ние, подложку с закрепленными на ней двумя группами электродов, источник постоянного напряжения, полюса которого соединены с соответствующими группами .электродов, отличающийся тем, что. с целью повышения быстродействия надежности захвата и открепления деталей путем создания акустических колебаний поверхности электроадгезионного захватывающего устройства в момент контакта с поверхностью детали, он дополнительно снабжен блоком управления, соединенным первым входом, с источником постоянного напряжения, а вторым - с управляющим входом аттенюатора с переменным коэффициентом передачи, включенным между выходом генератора переменного напряжения и усилителем мбщности, выход которого соединен с акустическим вибратором, размещенным между основанием и подложкой.
2. Схват робота по п. 1,отличающи- й с я тем, что акустический вибратор выполнен в виде магнитострикционного сердечника с обмоткой возбуждения, на одном из торцов которого закреплен датчик обратной связи, выход которого соединен с селективной цепью генератора переменного напряжения.
3. Схват робота поп. 1. о т л и ч а ющ и- й с я тем, что, с целью уменьшения габаритов и упрощения конструкции, акустический вибратор выполнен в виде диска из пьезоэлектрического материала, на обеих торцах которого размещены электроды.

| название | год | авторы | номер документа |
|---|---|---|---|
| Схват манипулятора | 1983 |
|
SU1096098A1 |
| Устройство для управления адаптивным роботом | 1980 |
|
SU888067A1 |
| Электростатический захват | 1987 |
|
SU1465310A1 |
| Схват промышленного робота | 1986 |
|
SU1433792A1 |
| Электромагнитный схват | 1991 |
|
SU1815221A1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ЭЛЕКТРОИСКРОВОГО ЛЕГИРОВАНИЯ | 1999 |
|
RU2164844C1 |
| СПОСОБ ОПТИМИЗАЦИИ ПРОЦЕССА МЕХАНИЧЕСКОЙ ОБРАБОТКИ С ПОСЛЕДУЮЩИМ АВТОМАТИЧЕСКИМ ОБЕСПЕЧЕНИЕМ ЗАДАННОЙ ИЗНОСОСТОЙКОСТИ РЕЖУЩЕГО ИНСТРУМЕНТА И КАЧЕСТВА ФОРМИРОВАНИЯ ПОВЕРХНОСТНОГО СЛОЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2104143C1 |
| Бесконтактный датчик тока на поверхностных акустических волнах | 2021 |
|
RU2779616C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УРОВНЯ И ДРУГИХ ПАРАМЕТРОВ ФРАКЦИОНИРОВАННОЙ ЖИДКОСТИ И МАГНИТОСТРИКЦИОННЫЙ УРОВНЕМЕР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2518470C1 |
| ИСТОЧНИК АКУСТИЧЕСКОГО ИЗЛУЧЕНИЯ | 1999 |
|
RU2174289C2 |

Использование: в конструкциях схватов роботов. Сущность изобретения: схват робота содержит основание, подложку с закрепленной на ней системой электродов, источник постоянного напряжения, полюсы которого соединены с двумя группами электродов. Схват робота снабжен блоком управления дискретного срабатывания, соединенным первым вход с источником постоянного напряжения, а вторым - с управляющим входом аттенюатора современным коэффициентом передачи, включенным между выходом генератора переменного напряжения и усилителем мощности, выход которого соединен с акустическим вибратором, размещённым между основанием и подложкой, причем акустический вибратор выполнен в виде магнитострикционного сердечника с обмоткой возбуждения, на верхней грани которого закреплен датчик обратной связи, выход которого соединен с селективной целью генератора переменного напряжения или в виде диска из пьезоэлектрического материала, на обоих гранях которого размещены электроды. 2 з.п. ф-лы, 4 ил.
Фиг, I
//
Фиг. 3
1821360
ВиЭА
Фиг. 4
/ff
| Авторское свидетельство СССР № 743264, кл | |||
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
