1
положены высокоомные резисторы 3, одним концом соединенные с вторым электродом 4,-а свободные заостренные концы 5 которых выступают из гнезд 2 в углублениях 6. Углубления 6 выполнены на рабочей стороне подложки 1 для сокращения жесткой контактирующей закрепляющей площади подложки. Заостренные концы 5 резисторов 3 обращены к нерабочей стороне полимерной пленки 7, В центральном канале 8 подложки соосно размещена втулка 9 с конической обжимающей поверхностью
Изобретение относится к схватам манипулятора, в частности к э хектро- статическим захватывающим и закрепляющим устройствам, и может быть ис пользовано в машино- и приборостроении, в радиоэлектронной промышленности для выполнения широкого перечня манипуляционных заданий с маложесткими листовыми материалами,, хрупкими плоскими деталями, сборочными единицами со сложным профилем поверхности
Цель изобретения - увеличение быстродействия и надежности захвата деталей.
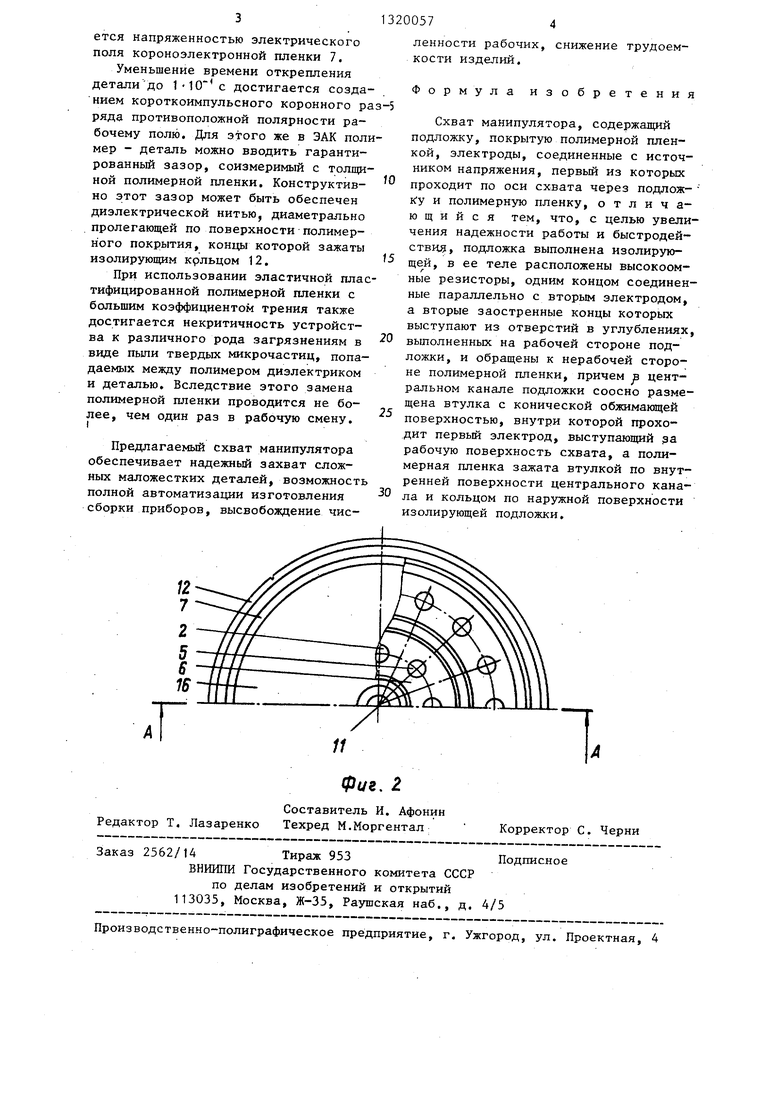
На фиг. 1 изображен схват, разрез На фиг. 2 - подложка схвата.
Устройство содержит подложку 1, выполненную из изолирующего мастери- ала, например винипласта, в теле которой в гнездах 2 расположены высокоомные резисторы 3, одним концом соединенные с вторым электродом 4, а свободные заостренные концы 5 которых выступают из гнезд 2 в углублениях 6. Углубления 6 выполнены на ра бочей стороне подложки 1 для сокращения жесткой контактирующей закрепляющей площади подложки.
Заостренные концы 5 резисторов 3 обращены к нерабочей стороне полимерной пленки 7.
В центральном канапе 8 подложки соосно размещена втулка 9 с конической обжимающей поверхностью 10, внут ри которой проходит первый электрод 11, Контактный электрод 11 выступает за рабочую поверхность подложки 1.
10, внутри которой проходит первый электрод 11, выступающий за рабочую поверхность подложки 1, Полимерная пленка 7 зажата втулкой 9 по внутренней конической поверхности центрального канала 8 и изолирующим кольцом 12 - по наружной боковой поверхности подложки 1, Электрод 11 соединен с источником питания 13, а электрод 4 через коммутатор 14 - с вторым полюсом источника напряжения. Источник питания и коммутатор управляются от программного устройства 15.- 2 ил
5
0
5
0
5
Полимерная пленка 7 зажата втулкой 9 по внутренней конической поверхности центрального канала 8 и изолирующим кольцом 12 по наружной боковой поверхности подложки 1.
Электрод 11 соединен с источником 13 питания, а коронозлектрод 4 через коммутатор 14 - с вторым полюсом источника напряжения. Источник питания и коммутатор управляются от программного устройства 15.
Устройство работает следующим образом.
Для захвата детали 16 нежесткую гибкую, эластичную закрепляющую поверхность полимерной пленки 7 приводят в контакт с деталью. При этом электрод 11 обеспечивает постоянньш контакт с захватываемым объектом.
По команде с программного устройства 15 через коммутатор 14 от источника 13 на коронный электрод 4 подается напряжение питания. Б электро- стимулированном адгезионном контакте (ЭАК) полимер - деталь возникает усилие электростатического взаимодействия, закрепляющее деталь на подложке схвата. С надежно удерживаемой деталью выполняют н обходимьш перечень манипуляционных заданий.
Для работы схвата в более эконо- 1УГИЧНОМ энергетическом режиме по команде с программного устройства после захвата детали источник 13 напряжения отключается. При этом усилие закрепления и удерживания определя
ется напряженностью электрического поля короноэлектронной пленки 7,
Уменьшение времени открепления детали до 1-10 с достигается созданием короткоимпульсного коронного р ряда противоположной полярности рабочему полю. Для этого же в ЭАК полмер - деталь можно вводить гарантированный зазор, соизмеримый с толщиной полимерной пленки. Конструктивно этот зазор может быть обеспечен диэлектрической нитью, диаметрально пролегающей по поверхности полимерного покрытия, концы которой зажаты изолирующим крльцом 12.
При использовании эластичной платифицированной полимерной пленки с большим коэффициентом трения также достигается некритичность устройства к различного рода загрязнениям в виде пыли твердых микрочастиц, попа- даемых между полимером диэлектриком и деталью. Вследствие этого замена полимерной пленки проводится не более, чем один раз в рабочую смену.
Предлагаемый схват манипулятора обеспечивает надежный захват сложных маложестких деталей, возможност полной автоматизации изготовления сборки приборов, высвобождение чис
0
5
5
0
5
0
ленности рабочих, снижение трудоемкости изделий.
Формула изобретения
Схват манипулятора, содержащий подложку, покрытую полимерной пленкой, электроды, соединенные с источником напряжения, первый из которых проходит по оси схвата через подлож- Ку и полимерную пленку, отличающийся тем, что, с целью увеличения надежности работы и быстродействия подложка выполнена изолирующей, в ее теле расположены высокоом- ные резисторы, одним концом соединенные параллельно с вторым электродом, а вторые заостренные концы которых выступают из отверстий в углублениях, выполненных на рабочей стороне подложки, и обращены к нерабочей стороне полимерной пленки, причем р центральном канале подложки соосно размещена втулка с конической обжимающей поверхностью, внутри которой проходит первый электрод, выступающий эз рабочую поверхность схвата, а полимерная пленка зажата втулкой по внутренней поверхности центрального канала и кольцом по наружной поверхности изолирующей подложки.
Редактор Т, Лазаренко
Фиг. Z
Составитель И. Афонин Техред М.Моргентал
Заказ 2562/14 Тираж 953Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Корректор С. Черни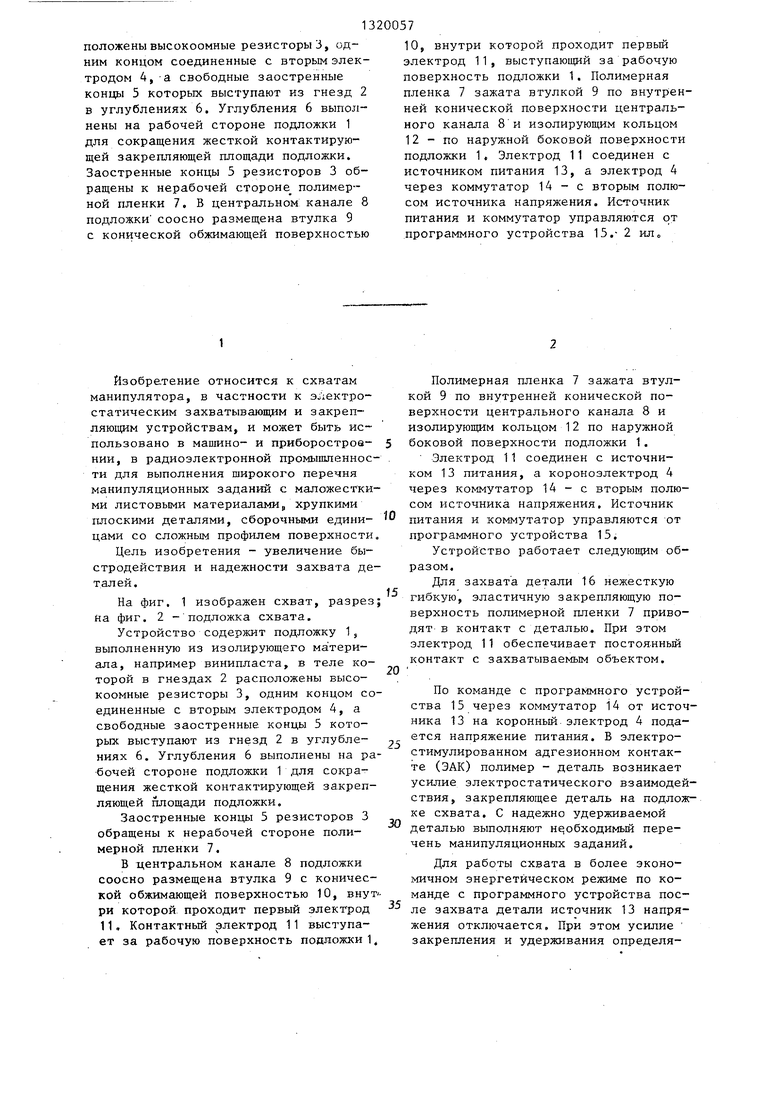
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват робота | 1984 |
|
SU1175692A1 |
| Схват манипулятора | 1980 |
|
SU944921A1 |
| Схват | 1984 |
|
SU1301693A1 |
| Схват манипулятора | 1980 |
|
SU973355A1 |
| Электромагнитное захватное устройство манипулятора | 1988 |
|
SU1641611A1 |
| Способ манипулирования ферромагнитными деталями с отверстием | 1986 |
|
SU1799727A1 |
| Устройство для диатермокоагуляции | 1982 |
|
SU1123676A1 |
| УСТРОЙСТВО ЭЛЕКТРОННОЙ СИГАРЕТЫ | 2012 |
|
RU2619016C2 |
| Устройство для управления автоматической сменой заготовок на токарных станках с числовым программным управлением | 1985 |
|
SU1275374A1 |
| Электрододержатель для ручной дуговой сварки | 1990 |
|
SU1787087A3 |
Изобретение относится к схватам манипуляторов, в частности к электростатическим захватывающим устройствам, и может использовано в машино- и приборостроении. Цель изобретения - увеличение надежности в работе и быстродействия устройства. Схват манипулятора содержит подложку, выполненную из изолирующего материала, в теле которой в гнездах 2 рас(Л
| Схват робота | 1984 |
|
SU1175692A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| А-А | |||
