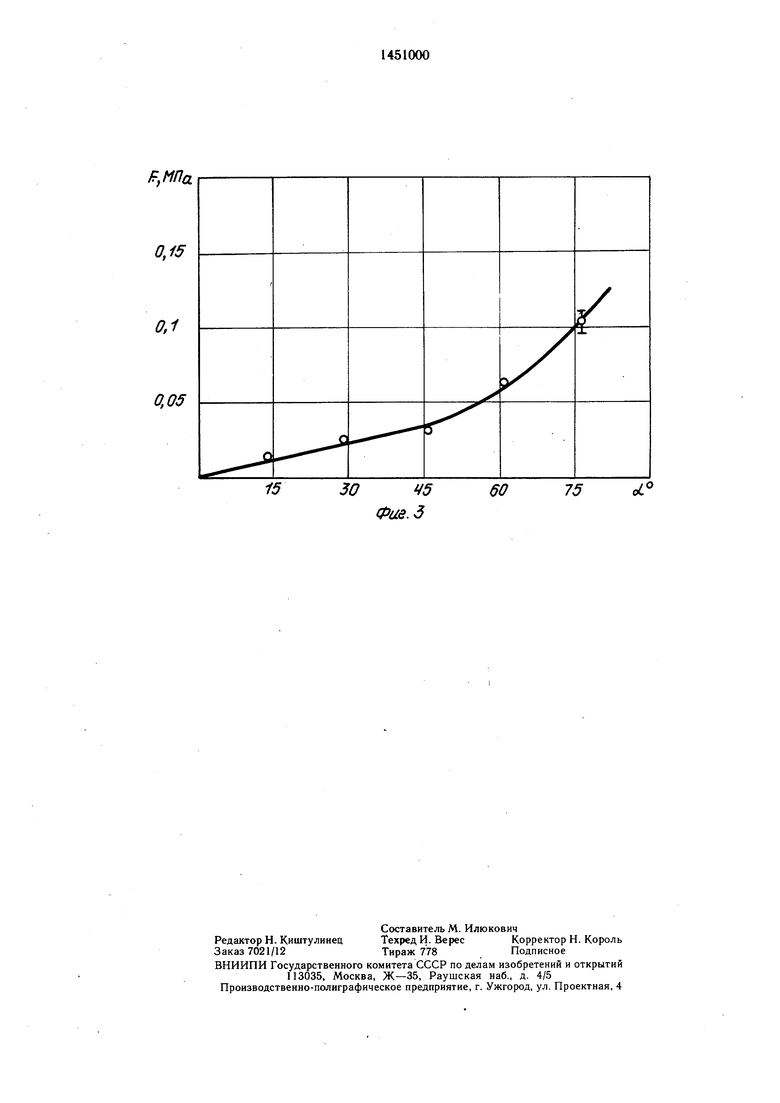
qfus.Z
1,МПа
0,15
0.1
0.05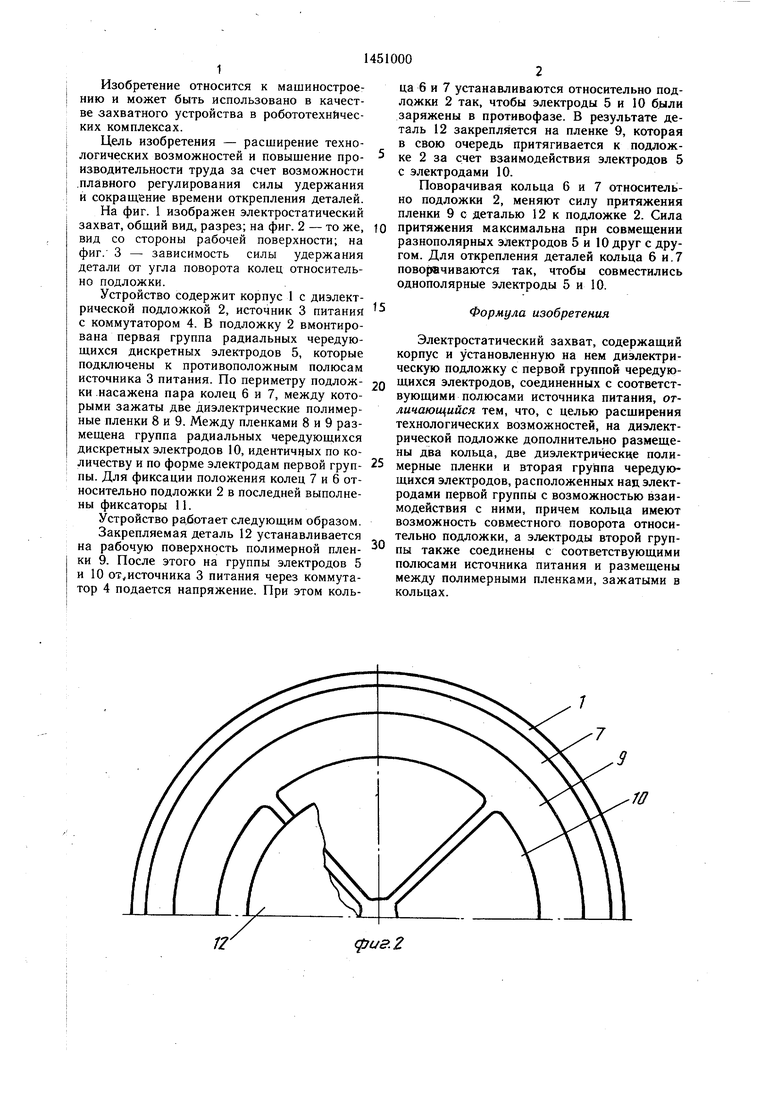
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват манипулятора | 1985 |
|
SU1320057A1 |
| СПОСОБ ЗАКРЕПЛЕНИЯ ПОЛУПРОВОДНИКОВЫХ ПЛАСТИН, ПРЕИМУЩЕСТВЕННО ПРИ МЕХАНИЧЕСКОЙ ОБРАБОТКЕ ИХ ПОВЕРХНОСТИ | 1988 |
|
SU1586466A1 |
| ЭЛЕКТРОСТАТИЧЕСКОЕ КРЕПЕЖНОЕ УСТРОЙСТВО | 1989 |
|
SU1718511A1 |
| Электростатический захват | 1987 |
|
SU1465310A1 |
| Схват робота | 1984 |
|
SU1175692A1 |
| РЕВЕРСИВНЫЙ ЭЛЕКТРОСТАТИЧЕСКИЙ МИКРОДВИГАТЕЛЬ ВРАЩЕНИЯ | 2012 |
|
RU2513030C2 |
| ТВЕРДОТЕЛЬНЫЙ ГАЗОВЫЙ СЕНСОР | 1996 |
|
RU2100801C1 |
| УСТРОЙСТВО ДЛЯ НАНЕСЕНИЯ ПОКРЫТИЙ НА МЕЛКИЕ ДЕТАЛИ МЕТОДОМ ЭЛЕКТРООСАЖДЕНИЯ | 1991 |
|
RU2008370C1 |
| УСТРОЙСТВО ДЛЯ НАНЕСЕНИЯ В ЭЛЕКТРИЧЕСКОМ ПОЛЕ НА ОДИН ИЗ ЭЛЕКТРОДОВ ПОКРЫТИЙ ИЗ МАТЕРИАЛОВ В ВИДЕ ПОРОШКА (ВАРИАНТЫ) | 1999 |
|
RU2190040C2 |
| ТВЕРДОТЕЛЬНЫЙ ГАЗОВЫЙ СЕНСОР | 1996 |
|
RU2102735C1 |
Изобретение относится к машиностроению и может быть использовано в качестве захватного устройства в робототехничес- ких комплексах. Цель изобретения - расширение технологических возможностей и повышение производительности труда. Для этого электростатический захват, сод«ржащий корпус 1 и установленную на нем диэлектрическую подложку 2 с первой группой чере- дуюш.ихся электродов 5, соединенных с противоположными полюсами источника питания 3, дополнительно снабжен кольцами 6, 7, между которыми зажаты полимерные пленки 8, 9. Между последними разме- ш.ена вторая группа чередуюш,ихся электродов 10. Кольца 6 и 7 имеют возможность поворота относительно подложки 2 и фиксации с помощью фиксатора П. Для закрепления детали 12 от источника питания 3 через коммутатор 4 на электроды 5, 10 подается напряжение. В результате деталь 12 вместе с пленкой 9 притягивается к подложке 2. Врашая кольца 6, 7 относительно подложки 2, изменяют силу притяжения детали к подложке. 3 ил. i (Л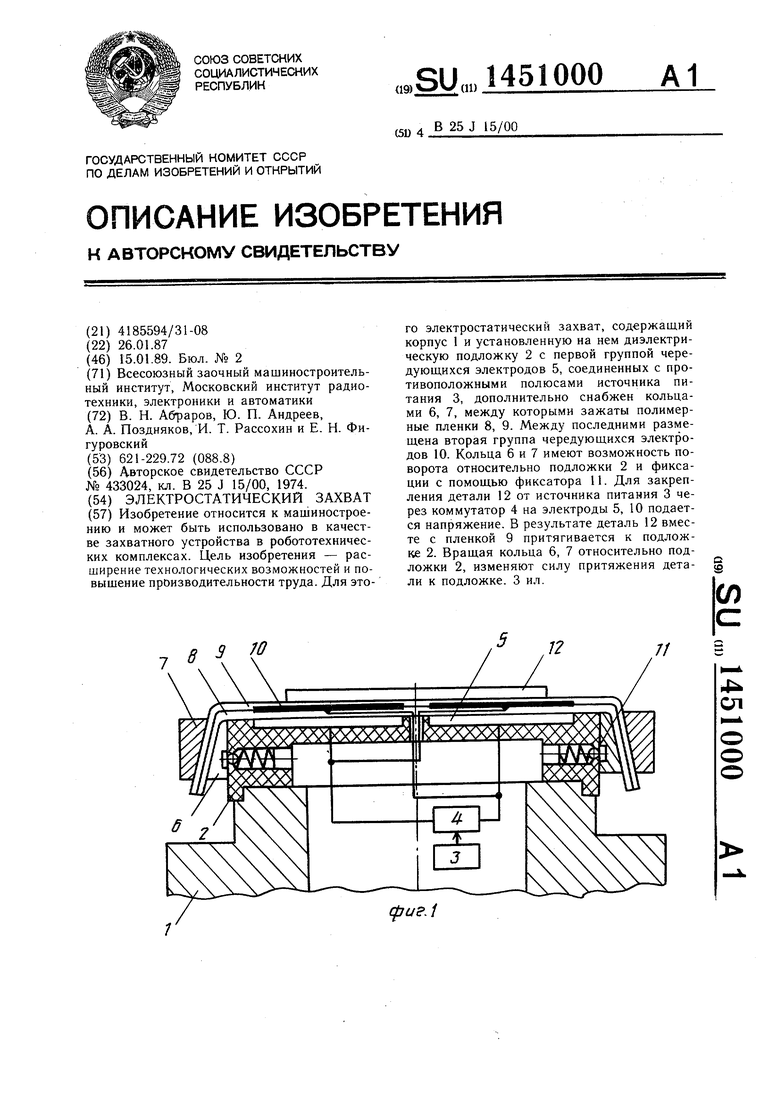
| МАНИПУЛЯТОР | 1973 |
|
SU433024A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
