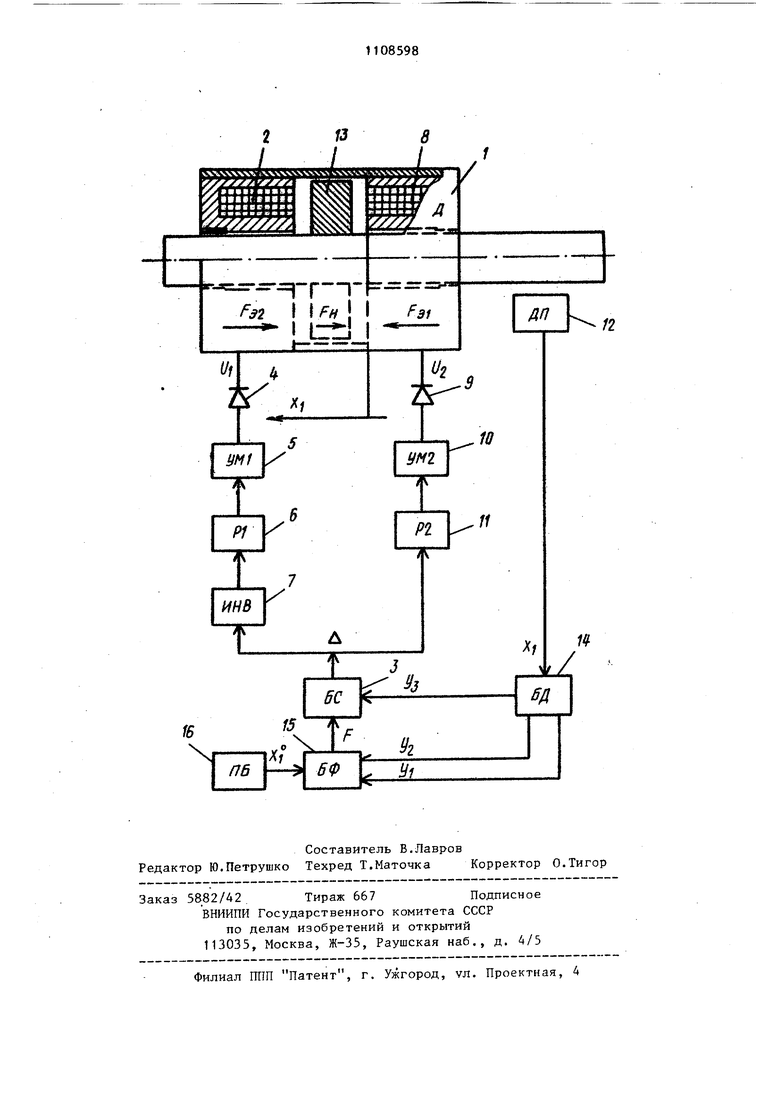
1 Изобретение относится к устройствам для управления двухобмоточными двигателями возвратно-поступательного движения с заданным законом движения исполнительного механизма и может быть использовано в машиностроении, металлургии и электротерми для управления силовыми идрораспределителями и другими дозирующими и регулирующими механизмами. Известен электропривод возвратнопоступательного движения, содержащий двухобмоточный двигатель возвратнопоступательного движения и систему управления с датчиком положения якоря П1. Недостатками данного электроприво да являются низкая точность воспроиз ведения заданных движений и зависимость динамических свойств от нагруз ки и диапазона перемещений якоря двигателя. Наиболее близким к изобретению по своей технической сущности является устройство для управления двухобмоточным двигателем возвратно-поступательного движения, содержащее датчик положения якоря, блок дифференцирования, подключенный к датчику положения, блок усилителя мощности и программный блок С21, Однако это устройство имеет ограниченные функциональные возможности и воспроизводит с высокой точностью и достаточно устойчиво только синусо идальное движение. Цель изобретения - расширение функциональньЕХ возможностей путем повышения точности воспроизведения заданных движений и расширения области устойчивости при любом законе движения, Указанная цель достигается тем, . что устройство для управления двухоб моточным двигателем возвратно-поступа тельного движения, содержащее датчи положения якоря, блок дифференцирова ния, подключенный к датчику положени блок усилителя мощности и программны блок, снабжено дополнительным программным блоком, блоком сравнения, инвертирующим усилителем, двумя ключами, дополнительным блоком усилител мощности и диодами, причем выход программного блока подсоединен к первому входу дополнительного программного блока, выход которого подсосдино) к пррному пходу блока 98 сравнения, блок дифференцирования своим первым выходом подсоединен ко второму входу дополнительного программного блока, вторым выходом подсоединен к третьему входу дополнительного программного блока, а третьим выходом подсоединен ко второму входу блока сравнения, выход которого через последовательно включенные инвертирующий усилитель, ключ, блок усилителя мощности и диод подсоединен к одной из обмоток двигателя, и через последовательно включенные другой ключ, дополнительный блок усилителя мощности и другой диод подсоединен к другой обмотке двигателя. На чертеже представлена схема управления устройства для управления двухобмоточным двигателем гэзвратно-поступательного движения. Устройство содержит электромагнитный двигатель 1, одна обмотка 2 ко1 орого подключена к выходу блока сравнения 3 через последовательно соединенные диод 4, блок усилителя мощности 5, ключ 6 и инвертирующий усилитель 7, а другая обмотка 8 подключена к выходу блока сравнения 3 через последовательно соединенные диод 9, дополнительный блок усилителя мощности 10 и ключ 11. Устройство содержит также последовательно соединенные датчик 12 положения якоря 13, блок дифференцирования 14 и дополнительный программный блок 15, подключенньй также к входам блока сравнения 3 и программного блока 16. Блок дифференцирования 14 подсоединен также к другому входу блока сравнения 3. Устройство работает следующим образом, Пусть в начальный момент времени якорь 13 двигателя 1 находится в крайнем правом положении и сигнал х . на выходе датчика 12 положения равен нулю. При появлении задающего сигнала х° и,4 на выходе блока 16, на выходе блока сравнения 3 появляется сигнал начального рассогласования Л Л. Этот сигнал усиливается блоками 5, 6,7 и через диод 4 поступает на обмотку 2 в виде напряжения управления и .В результате по обмотке 2 протекает ток I, , возникает тяговое усилие Fj;, и якорь 13 перемещается против сил нагрузки F в направлении уменьшения рабочего нотдушного чазоpa к обмотке 8. При этом на выходах дифференцирования 14 появляются сигналы, пропорциональные выходной вели чине (координате перемещения х,, и ее производным 1 . 4b Qxi ° ответственно, причем использование блоков с соответствующими связями приводит к формированию алгоритма управления Ц(х% Ц, ,2., ) . обеспечивающего достаточно точное воспроизведение заданного закона x(-t) во всем рабочем диапазоне перемещений якоря 13 и при действии силовых и параметрических возмущений Это объясняется тем, что в данном устройстве обеспечивается огранизация контура быстрых движений (контура: поддержания желаемого значения производной выходной величины в соот ветствии с функцией ), в котором осуществляется локализация и быстро парирование возмущений и свойс,тв двигателя как нелинейного и структур но неустойчивого объекта управления, что приводит к расширению области ус тойчивости устройства. Пусть на выходе блока 5 формирует ся требуемая, например вторая, производная выходной величины х, в соответствии с заданным дифференциальным уравнением движения Х хз F(x,Y), Y у„ (1) у (jip) x-,(/pl + jtb, р+1) ,.2,3 где F - непрерывная однозначная функция ; х°- предписанное значение выходн величины (сигнал на выходе блока 16); WP- передаточная функция блока 1 - малый параметр, определяю щий инерционность блока 14; Ь« 1,2-1,4; y,y,j,y -оценки выходной величины х и ее производных х к Х - на выходе блока 14. ФункцияТ (х° ,Y) описывает, например квазиоптимальные по быстродействию процессы позиционирования. Удобно конструировать эту функцию линейной например, в виде xj, f(x- -у, ) - 2dT (2 F(,Y) где T,d параметры пере.ходно1:о процесса (постоянная времени и коэффициент дифференцир вания соответственно). В этом случае (если F линейная функция) блок 13 реализуется в виде усилителя постоянного тока с тремя суммирующими входами. Для подчинения движения якоря 13 уравнению (2) используют принцип локализации возмущений, реализуемый организацией быстродействующего контура поддержания желаемого значения производной х , работающего в скоаьзящем режиме. В соответствии с этим алгоритм управления электромагнитным двигателем 1 имеет следующий вид: и, U signi, Uj. -U , (3) где + Uyn - уровни ограничений на выходное напряжения блоков 5 и 10 усилителей мощности. Следовательно, устройство обеспечивает стабилизацию его динамических .свойств (в соответствии с заданной функцией, формируемой на выходе блока 15) в широком диапазоне изменения силовых и параметрических возмущений и фазовых координат х.,, x-j., Xj. При этом устройство может работать в двух режимах: следящем (отслеживание задающего воздействия на выходе блока 16), и режиме воспроизведения заданных переходных процессов, например в соответствии с уравнением (2). В первом случае при выборе параметров блоков устройства необходимо выполнить следующие условия: 10 Т, lOjxcT, 10ТСТ% где Т - постоянная времени переходных процессов на выходе блока 16; Тд, - минимальное значение квазипостоянной времени (быстро- действие) электромагнитного двигателя 1 с нагрузкой Г (х). 1 . -- . Во втором случае неравенство ЮТ с Т исключается и предельно достижимое быстродействие устройства примерно в 10 раз меньше. Таким образом, введение дополнительных блоков и особенно дополнительного программного блока, формирующего требуемое значение производной, позволяет повысить точность воспроизведения заданных движений и расширить область устойчивости устройства при любых заданных законах движения по сравнению с известным устройством, т.е. расширяет его функциональные возможности.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления двухобмоточным двигателем возвратно-поступательного движения | 1981 |
|
SU1103339A1 |
| Электропривод возвратно-поступательного движения | 1983 |
|
SU1136295A1 |
| Устройство для управления двухобмоточным двигателем возвратно-поступательного движения (его варианты) | 1984 |
|
SU1241404A1 |
| Система управления линейным двигателем постоянного тока | 1981 |
|
SU980241A1 |
| Электродинамический вибратор | 1981 |
|
SU986509A1 |
| Устройство для управления линейным электродвигателем постоянного тока | 1979 |
|
SU855916A1 |
| Линейный шаговый электропривод | 1984 |
|
SU1244780A1 |
| Электропривод возвратно-поступательного движения (его варианты) | 1984 |
|
SU1272462A1 |
| Устройство для управления вибровозбудителем | 1981 |
|
SU1012064A1 |
| Электропривод возвратно-поступательного движения | 1983 |
|
SU1136294A1 |
УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВУХОБМОТОЧНЫМ ДВИГАТЕЛЕМ ВОЗВРАТНОПОСТУПАТЕЛЬНОГО ДВИЖ1::НИЯ, содержащее датчик положения якоря, блок дифференцирования, подключенный к датчику положения, блок усилителя мощности и программный блок, отличающееся тем, что, с целью расширения функциональных возможностей путем повышения точности воспроизведения заданных движений и расширения области устойчивости, оно снабжено дополнительным программньм блоком, блоком сравнения, инвертирующим усилителем, двумя ключами, дополнительным блоком усилителя мощности и двумя диодами, причем выход программного блока подсоединен к первому входу дополнительного программного блока, выход которого подсоединен к первому входу блока сравнения, блок дифференцирования своим первым выходом подсоединен ко второму входу дополнительного программного блока, вторым входом подсоединен к третьему входу дополнительного программного блока, а третьим выходом подсоединен ко второму входу блока сравнения, выход которого через по(Л следовательно включенные инвертируюс щий усилитель, ключ, блок усилителя и диод подсоединен к одной из обмоток двигателя, и через последовательно включенные другой ключ, дополнительный блок усилителя мощности и другой диод подсоединен к другой обмотке о эо двигателя. D1 :о эо
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Система управления электромагнитнымКОМпРЕССОРОМ | 1979 |
|
SU827842A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Авторское свидетельство СССР по заявке ( 3346728/24-07, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
