1возвратно-поступательного движения с датчиком 5 положения якоря-2. Структура устройства является неявной реализацией управления по вектору скорости, при котором в регуляторе нет оценок производных, нет явно вьлраженного дифференцирующего фильтра (блока дифференцирования). В устройстве нет зависимости переИзобретение относится к управлению электрическими машинами и может быть и-спользовано при построении устройств управления гидрораспределителями и другш механизмами
Целью изобретения является повышение точности воспроизведения заданных движений и повьшхение КПД.
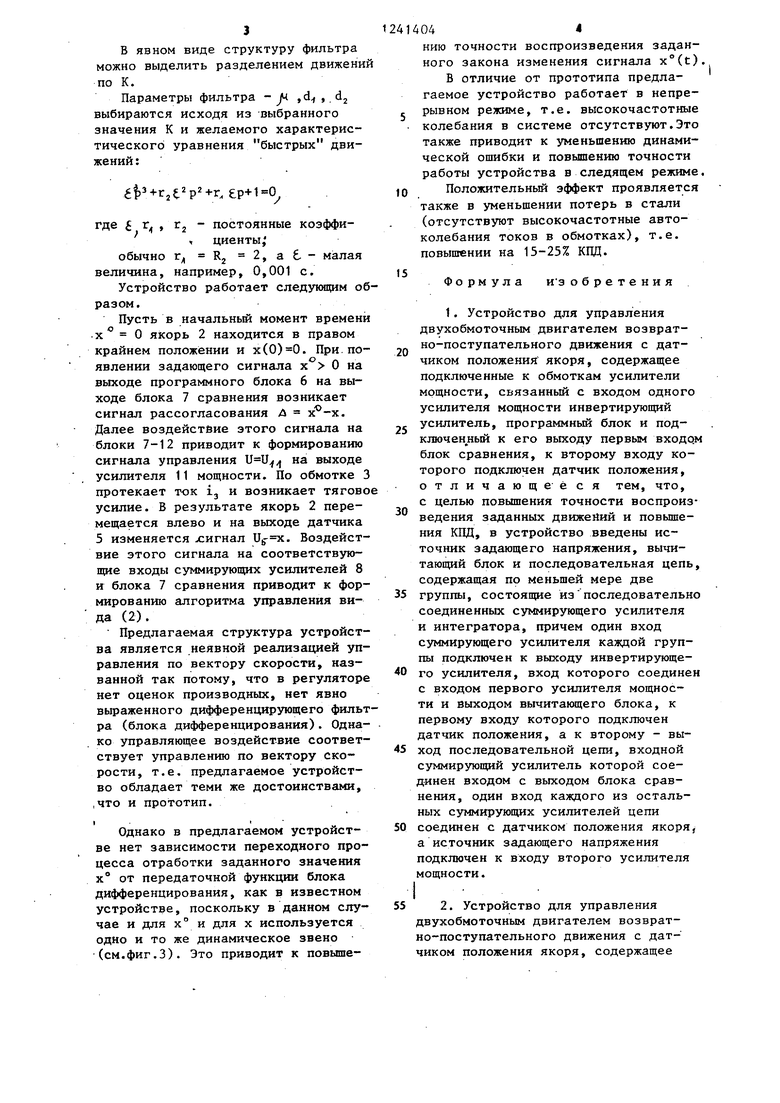
На фиг.1 представлена функциональная схема предлагаемого устрой- ства (первый вариант), на фиг.2 - функциональная схема предлагаемого устройства (второй вариант), на фиг.З - структурная схема устройства.
Устройство управления двухобмо- точным двигателем (Д) 1 возвратно- поступательного движения с якорем 2 и обмотками 3,4 содержит датчик положения (ДП) 5 и якоря 2, последо- вательно соединенные программный блок (БП) 6, блок сравнения (БС) 7, суммирукацие усилители (СУ) 8 и интеграторы (И) 9, вычитающий блок (ВБ) 10 и усилитель мощности (УМ) 11, подключенный к обмотке 3 двигателя. Устройство содержит также инвертирующий усилитель (ИНВ) : 12, подключенный своим входом к выходу вычитающ его блока 10, а выхо- дом - к другим входам суммирующих усилителей 8, при этом выходы датчика 5 положения подсоединены ко второму входу блока 7 сравнения, другим входаМ:Всех суммирзпощих уси лителей 8, кроме первого, другому входу вычитающего блока 10.
В варианте выполнения, показан- ном на фиг.1, обеспечивается управление током в обмотке 3, другая е обмотка 4 через усилитель 11 мощходного процесса отработки заданного значения X от передаточной функции блока дис|)ференцирования, поскольку в данном случае и для Х и X используется .одно и то же динамическое звено. Это приводит к повышению точности воспроизведения заданного закона изменения сигнала Х° (t). 1 3 ьП. ф-лы, 3 ил.
ности подключена к источнику 13 задающего напряжения (ИЗН).
В варианте выполнения, из обра- женном на фиг.2, обмотка 4 через . уси гатель .11 мощности и инвертор 12 подключена тг1кже к выходу вычитающего блока 10.
Программный блок 6 может быть выполнен в виде источника задающего напряжения. Усилители мощности 11 выполняются на транзисторах или тиристорах (например, по схеме ОШП). Суммируюшде усилители 8 имеют по два или три выхода, по каждому из которых устанавливается соответствующий коэффициент передачи.
Необходимое количество суммирующих усилителей 8 и интеграторов 9 определяется порядком математической модели двигателя, который не может быть меньше двух (если пренебречь электромагнитной инерцией обмоток 3 и 4).
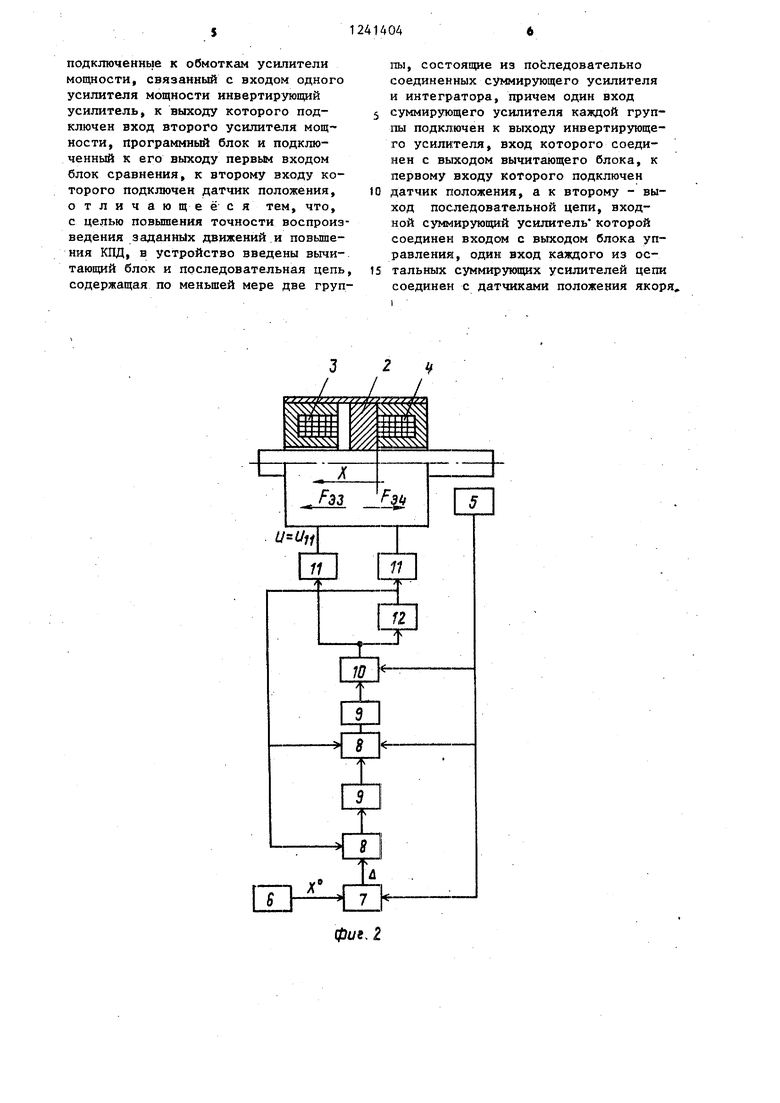
Показанная: на фиг.З структурная схема соответствует математической модели двигателя третьего порядка.
В данном случае Конструируется желаемое уравнение движения в сле- дукицем виде
X AjX -I- А X + А(,х + Вох ,
Выбранные значения коэффициентов АО, А, Aj, BC таким образом определяют необходимые коэффициенты передачи усилителей 8 по соответ- ств ующ м входам.
В изобретении в неявном виде реализован фильтр, динамика которого ош1сыв 1ется уравнением:
« + 4,Р + 1-0
в явном виде структуру фильтра можно выделить разделением движений по К.
Параметры фильтра - jU ,d, dj выбираются исходя из выбранного значения К и желаемого характеристического уравнения быстрых движений:
dt +rje p +r, .
где г , Tj - постоянные коэффи- , циенты,
обычно г 2,at- малая величина, например, 0,001 с.
Устройство работает следующим образом.
Пусть в начальный момент времени X О якорь 2 находится в правом крайнем положении и х(0)0. При. появлении задающего сигнала х° О на выходе программного блока 6 на выходе блока 7 сравнения возникает сигнал рассогласования Л . Далее воздействие этого сигнала на блоки 7-12 приводит к формированию сигнала управления на выходе усилителя 11 мощности. По обмотке 3 протекает ток i и возникает тягово усилие. В результате якорь 2 перемещается влево и на выходе датчика 5 изменяется сигнал . Воздействие этого сигнала на соответствующие входы суммирующих усилителей 8 и блока 7 сравнения приводит к формированию алгоритма управления вида (2).
Предлагаемая структура устройства является неявной реализацией управления по вектору скорости, названной так потому, что в регуляторе нет оценок производных, нет явно выраженного дифференцирующего фильтра (блока дифференцирования). Однако управляющее воздействие соответствует управлению по вектору скорости, т.е. предлагаемое устройство обладает теми же достоинствами, ,что и прототип.
I1
Однако в предлагаемом устройстве нет зависимости переходного процесса отработки заданного значения х° от передаточной функции блока дифференцирования, как в известном устройстве, поскольку в данном случае и для х° и для х используется одно и то же динамическое звено (см.фиг.3). Это приводит к повыше2414044
нию точности воспроизведения заданного закона изменения сигнала x°(t).
В отличие от прототипа предлагаемое устройство работает в непре- , рывном режиме, т.е. высокочастотные колебания в системе отсутствуют.Это также приводит к уменьшению динамической ошибки и повышению точности работы устройства в следящем режиме. 0 Положительный эффект проявляется также в уменьшении потерь в стали (отсутствуют высокочастотные автоколебания токов в обмотках), т.е. повышении на 15-25% КЦЦ.
15
Формула и э о б р е т е н и я
0
1. Устройство для управления дву хобмоточным двигателем возврат- но-поступательного движения с датчиком положения якоря, содержащее подключенные к обмоткам усилители мощности, связанный с входом одного усилителя мощности инвертирующий усилитель, программный блок и под- ключeнJный к его выходу первым входом блок сравнения, к второму входу которого подключен датчик положения, отличающе ёся тем, что, с целью повышения точности воспроизведения заданных движений и повышения КПД, в устройство введены источник задающего напряжения, вычитающий блок и последовательная цепь, содержащая по меньшей мере две
5 группы, состоящие из последовательно соединенных суммирующего усилителя и интегратора, причем один вход суммирующего усилителя каждой группы подключен к выходу инвертирующе0 го усилителя, вход которого соединен с входом первого усилителя мощности и выходом вычитающего блока, к первому входу которого подключен датчик положения, а к второму - вы5 ход последовательной цепи, входной суммирующий усилитель которой соединен входом с выходом блока сравнения, один вход каждого из остальных суммирующих усилителей цепи
0 соединен с датчиком положения якоря а источник задающего напряжения подключен к входу второго усилителя мощности.
I 2. Устройство для управления
двухобмоточным двигателем возвратно-поступательного движения с датчиком положения якоря, содержащее
подключенные к обмоткам усилители мощности, связанный с входом одного усилителя мощности инвертирующий усилитель, к выходу которого подключен вход второго усилителя мощности, программный блок и подключенный к его выходу первым входом блок сравнения, к второму входу которого подключен датчик положения, отличающееся тем, что, с целью повышения точности воспроизведения заданных движений и повышения КПД, в устройство введены вычитающий блок и последовательная цепь содержащая по меньшей мере две груп
пы, состоящие из поЬледовательно соединенных суммирующего усилителя и интегратора, причем один вход суммирующего усилителя каждой группы подключен к выходу инвертирующего усилителя, вход которого соединен с выходом вычитающего блока, к первому входу которого подключен датчик положения, а к второму - выход последовательной цепи, входной суммирующий усилитель которой соединен входом с выходом блока управления, один вход каждого из остальных суммир ующих усилителей цепи соединен с датчиками положения якоря.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод возвратно-поступательного движения | 1983 |
|
SU1136295A1 |
| Устройство для управления двухобмоточным двигателем возвратно-поступательного движения | 1982 |
|
SU1108598A1 |
| Электропривод возвратно-поступательного движения (его варианты) | 1984 |
|
SU1272462A1 |
| Устройство для управления двухобмоточным двигателем возвратно-поступательного движения | 1981 |
|
SU1103339A1 |
| Система управления линейным двигателем постоянного тока | 1981 |
|
SU980241A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПАРАМЕТРАМИ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2414048C1 |
| ЛИНЕЙНЫЙ СЛЕДЯЩИЙ ЭЛЕКТРОПРИВОД | 1989 |
|
RU1774821C |
| Устройство улучшения коммутации коллекторной электрической машины постоянного тока | 1983 |
|
SU1125709A1 |
| Устройство для управления планарным шаговым электродвигателем | 1988 |
|
SU1601732A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМОЙ С ВЯЗКОУПРУГОЙ КИНЕМАТИЧЕСКОЙ СВЯЗЬЮ | 2010 |
|
RU2446552C2 |
Изобретение относится к управлению электрическими машинами и направлено на повышение точности восщ)оизведе{П1я заданных движений и повышение КПД устройства для управления двухобмоточным двигателем (Л 4Sb 
х
по-нп
фуе. 2
Редактор A. Долинич
Составитель В. Алфимов
Техред л.Олейник Корректор В. Бутяга
Заказ 3609/52 Тираж 631 Подписное ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная,4
If
| Устройство для управления двухобмоточным двигателем возвратно-поступательного движения | 1981 |
|
SU1103339A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для управления двухобмоточным двигателем возвратно-поступательного движения | 1982 |
|
SU1108598A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
