Изобретение предназначено для поштучной выдачи деталей, в частности поддонов с заготовками, и может быть использовано при загрузке автоматических станков и сборочных машин.
Целью изобретения является расширение технологических воаможностей устройства путем обеспечения возможности передачи деталей через отсекатели магазина в обоих направлениях, как снизу вверх, так и сверху вниз.
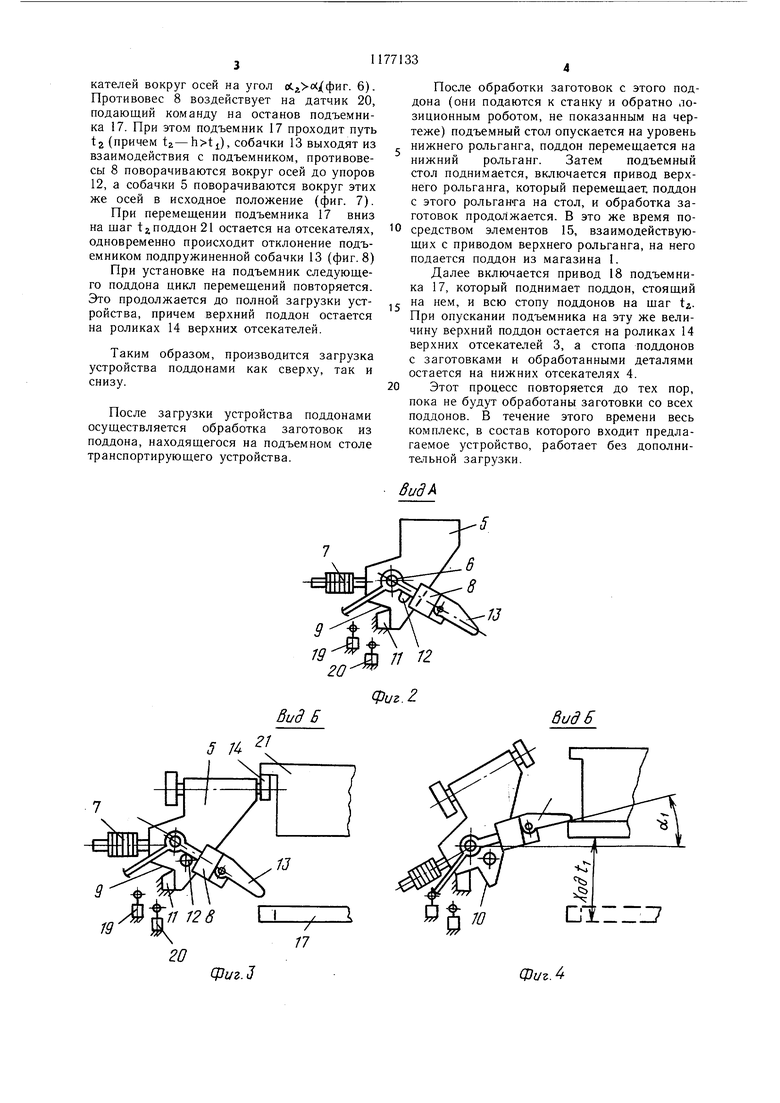
На фиг. 1 показано устройство, общий вид; на фиг. 2 - вид А на фиг. 1; на фиг. 3-8 - вид Б на фиг. 1 (схема работы верхних отсекателей); на фиг. 9 - вид В на фиг. 1.
Устройство состоит из магазина 1 и подъемно-опускного механизма 2. В верхней и нижней частях магазина 1 установлены соответственно отсекатели 3 и 4.
Каждый отсекатель содержит поворотную собачку 5, установленную на оси 6 и снабженную противовесами 7 и 8, которые выполнены регулируемыми для обеспечения надежного срабатывания собачки 5.
Собачка 5 снабжена выступами 9 и 10 для взаимодействия с упором 11. Противовес 8 установлен соосно с поворотной собачкой 5. Опорой для противовеса 8 служит закрепленный на поворотной собачке 5 упор 12.
На противовесе 8 установлена с возможностью поворота в одном направлении подпружиненная собачка 13. В верхней части поворбтных собачек 5 отсекателей 3 установлены опорные ролики 14.
В зависимости от конструкции транспортируюш.его устройства, на которое выдаются поштучно детали или оба опорных ролика 14, или только левый, или только правый, снабжены элементом 15, например фрикционным диском для кинематической связи с приводом транспортирующего устройства 16. Подъемно-опускной механизм 2 представляет собой подъемник 17 с приводом 18.
На магазине 1 установлены датчики угла поворота противовесов 8, определяющие величину хода подъемника 17. Датчики 19 и 20 связаны с общей системой управления по заданной программе всего транспортноскладского комплекса, в состав которого входит предлагаемое устройство. Детали расположены в магазине на поддонах 21.
Устройство работает следующим образом.
Исходное положение устройства при загрузке его сверху показано на фиг. 3. Противовесы 8 отсекателей упираются в упоры 12, а собачки 5 упираются выступом 10 в упоры 11. Подъемник 17 находится в верхней части магазина 1, ниже верхних собачек 13.
Перегрузочное средство (не показано) устанавливает деталь, в данном случае поддон 2 с ориентированно уложенными в нем заготовками, на ролики 14 верхних отсекатес лей 3 магазина 1. Включается привод верхнего рольганга транспортирующего устройства 16. При этом кинематически связанный с приводом элемент 15 пере1иещает поддон 21 влево на верхний рольганг и далее на подъемный стол транспортирующего устройства.
Затем в то же положение устанавливается следующий поддон, который также перемещается приводом на верхний рольганг. После этого устанавливается третий поддон и производится загрузка устройства.
5 Для этого включается привод 18 подъемноопускного механизма 2, и подъемник 17 перемещается вверх.
Подъемник 17 посредством собачки 13 поворачивает противовесы 8 верхних отсекателей 3 на угол oL к приподнимает поддон 21 с роликов 14. При этом собачка 5 поворачивается под действием противовеса 7 до тех пор, пока выступ 9 не соприкасается с упором 11. Останов подъемника 17 в верхнем положении обеспечивается воздействием противовеса 8 на датчик 19, который выдает команду на остановку привода подъемно-опускного механизма 2. При этом величина перемещения подъемника 17 представляет шаг tj (фиг. 4).
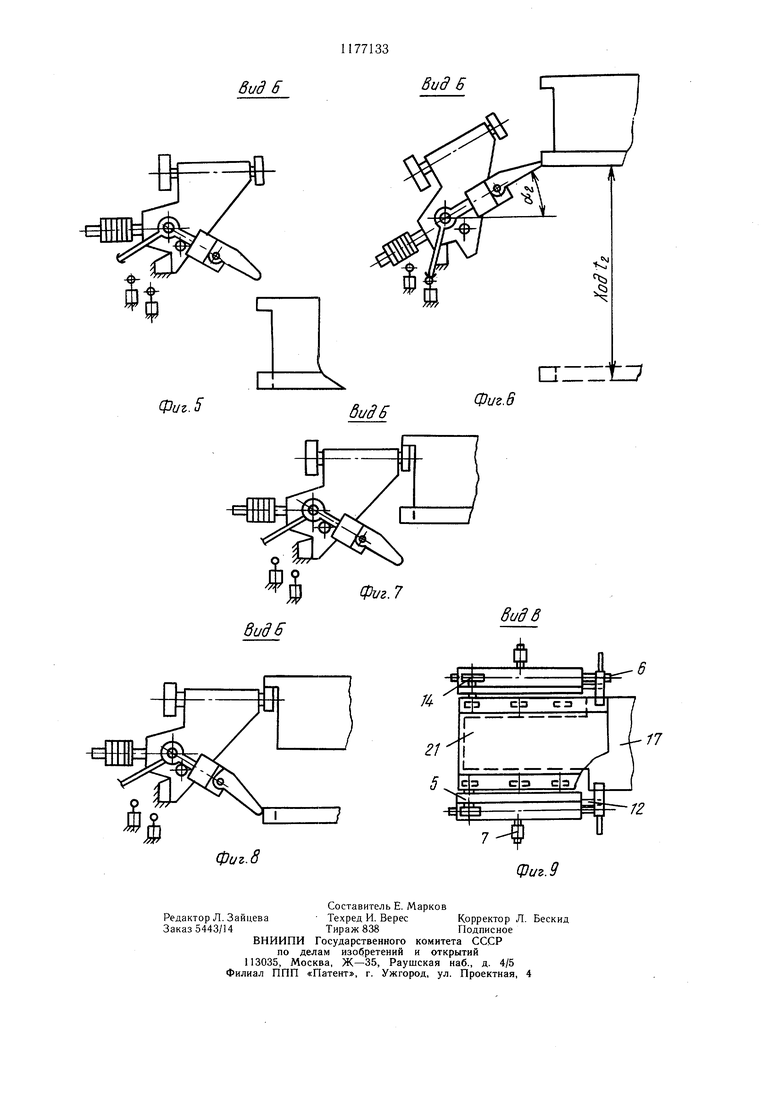
0 Затем подъемник 17 вместе с поддоном и противовесом 8 опускается. При опускании противовеса 8 под воздействием его на упор 12 собачки 5 последняя начинает поворачиваться вокруг оси 6 и занимает исходное положение, упираясь выступом 10 в упор
11. Выполнив шаг, равный t -f h, где h - высота поддона 21, подъемник 17 останавливается (фиг. 5).
Далее перегрузочное устройство устанавливает на ролики 14 очередной поддон.
0 Подъемник 17 вместе с находящимся на не.м предыдущим поддоном перемещается вверх на шаг t , а при последующем опускании на щаг t -f h на подъемнике остаются два поддона.
Таким образом производится загрузка
5 магазина.
После полной загрузки магазина подъемник 17 проходит через нижние отсекатели 4, поворачивая вниз собачки 13. которые под действием пружины (не показана) возвраQ щаются в исходное положение. Вся стопа поддонов остается на нижних отсекателях 4. Подъемник 17 перемещается в нижнее положение (фиг. 1).
При загрузке устройства снизу оно работает следующим образом.
5 Загружаемый поддон устанавливается на подъемник 17, который вместе с поддоном 21 перемещается вверх, поворачивает собачки 13 с противовесами 8 нижних отсекателей вокруг осей на угол ос.(/фиг. 6). Противовес 8 воздействует на датчик 20, подающий команду на останов подъемника 17. При этом подъемник 17 проходит путь t2 (причем ), собачки 13 выходят из взаимодействия с подъемником, противовесы 8 поворачиваются вокруг осей до упоров 12, а собачки 5 поворачиваются вокруг этих же осей в исходное положение (фиг. 7).
При перемещении подъемника 17 вниз на шаг t а поддон 21 остается на отсекателях, одновременно происходит отклонение подъемником подпружиненной собачки 13 (фиг. 8)
При установке на подъемник следующего поддона цикл перемещений повторяется. Это продолжается до полной загрузки устройства, причем верхний поддон остается на роликах 14 верхних отсекателей.
Таким образом, производится загрузка устройства поддонами как сверху, так и снизу.
После загрузки устройства поддонами осуществляется обработка заготовок из поддона, находящегося на подъемном столе транспортирующего устройства.
После обработки заготовок с этого поддона (они подаются к станку и обратно лозиционным роботом, не показанным на чертеже) подъемный стол опускается на уровень нижнего рольганга, поддон перемещается на нижний рольганг. Затем подъемный стол поднимается, включается привод верхнего рольганга, который перемещает, поддон с этого рольганга на стол, и обработка заготовок продолжается. В это же время посредством элементов 15, взаимодействующих с приводом верхнего рольганга, на него подается поддон из магазина 1.
Далее включается привод 18 подъемника 17, который поднимает поддон, стоящий на нем, и всю стопу поддонов на щаг t. При опускании подъемника на эту же величину верхний поддон остается на роликах 14 верхних отсекателей 3, а стопа поддонов с заготовками и обработанными деталями остается на нижних отсекателях 4.
Этот процесс повторяется до тех пор, пока не будут обработаны заготовки со всех поддонов. В течение этого времени весь комплекс, в состав которого входит предлагаемое устройство, работает без дополнительной загрузки.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ПОШТУЧНОЙ ВЫДАЧИ ИЗДЕЛИЙ ИЗ СТОПЫ | 1990 |
|
RU2006436C1 |
| Пакетоформирующая машина | 1984 |
|
SU1168497A1 |
| Линия для настилания и раскроя полотна | 1978 |
|
SU791579A1 |
| Устройство для хранения сыра в процессе созревания | 1986 |
|
SU1380691A1 |
| Устройство для укладки грузов в пакет | 1983 |
|
SU1194797A1 |
| Линия изготовления комбинированных балок | 1988 |
|
SU1558676A1 |
| Устройство для выдачи штучных изделий из штабеля | 1974 |
|
SU512145A1 |
| ПОДЪЕМНО-ТРАНСПОРТНОЕ ОБОРУДОВАНИЕ КОМПЛЕКСА ТЕРМООБРАБОТКИ КЕРАМИЧЕСКИХ ИЗДЕЛИЙ И КАССЕТА ДЛЯ ТРАНСПОРТИРОВКИ КЕРАМИЧЕСКИХ ИЗДЕЛИЙ | 2013 |
|
RU2526572C1 |
| Устройство для сборки-разборки стопы плоких изделий | 1988 |
|
SU1618710A1 |
| Транспортная система несинхронной сборочной линии спутникового типа | 1981 |
|
SU956242A1 |
УСТРОЙСТВО ДЛЯ ПОШТУЧНОЙ ВЫДАЧИ ДЕТАЛЕЙ, содержащее магазин с установленными на нем отсекателями, выполненными в виде поворотных собачек, снабженных противовесами, один из которых установлен с возможностью поворота относительно собачки, и подъемно-опускной механизм, отличающееся тем, что, с целью расширения технологических возможностей устройства, противовесы отсекателей, установленные с возможностью поворота, снабжены дополнительными подпружиненными собачками, а на магазине установлены датчики угла поворота этих противовесов. (Л со со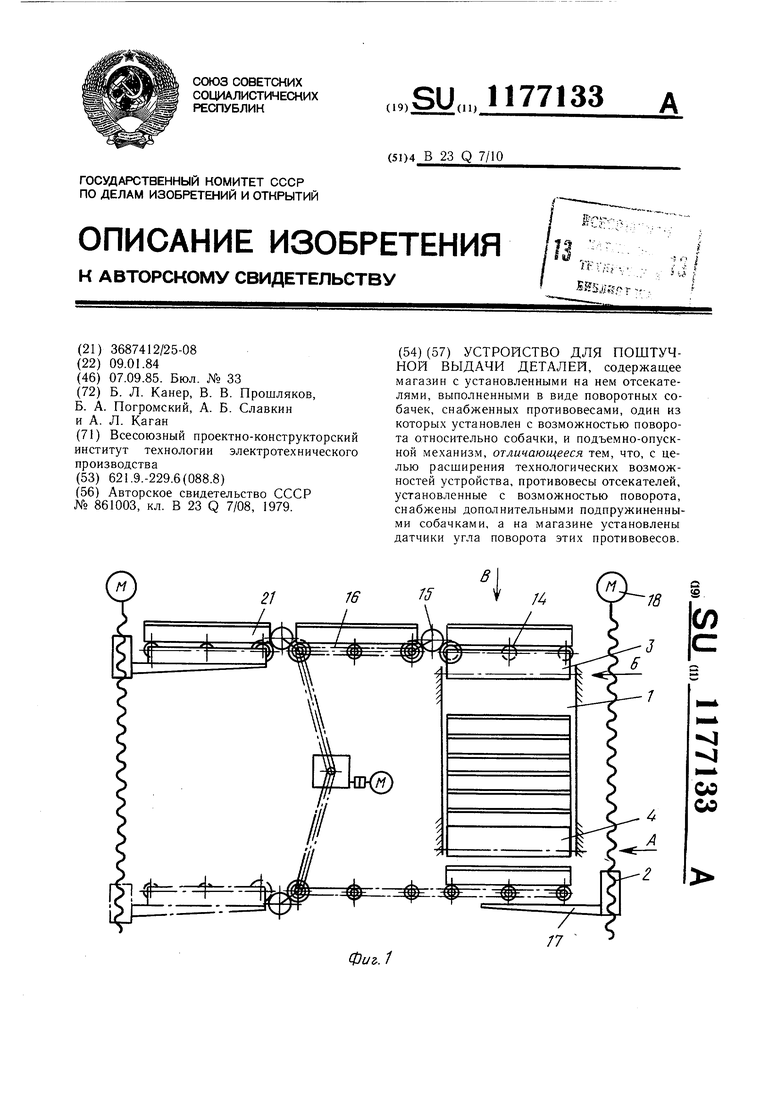
5 /4
19
CpuB.J
ФигА
| Устройство для поштучной выдачи деталей | 1979 |
|
SU861003A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
