Изобретение относится к области управЯения транспортными средствами, в частности для перевозки деталей в автоматизированных цехах.
Целью изобретения является повышения экономичности и надежности системы.
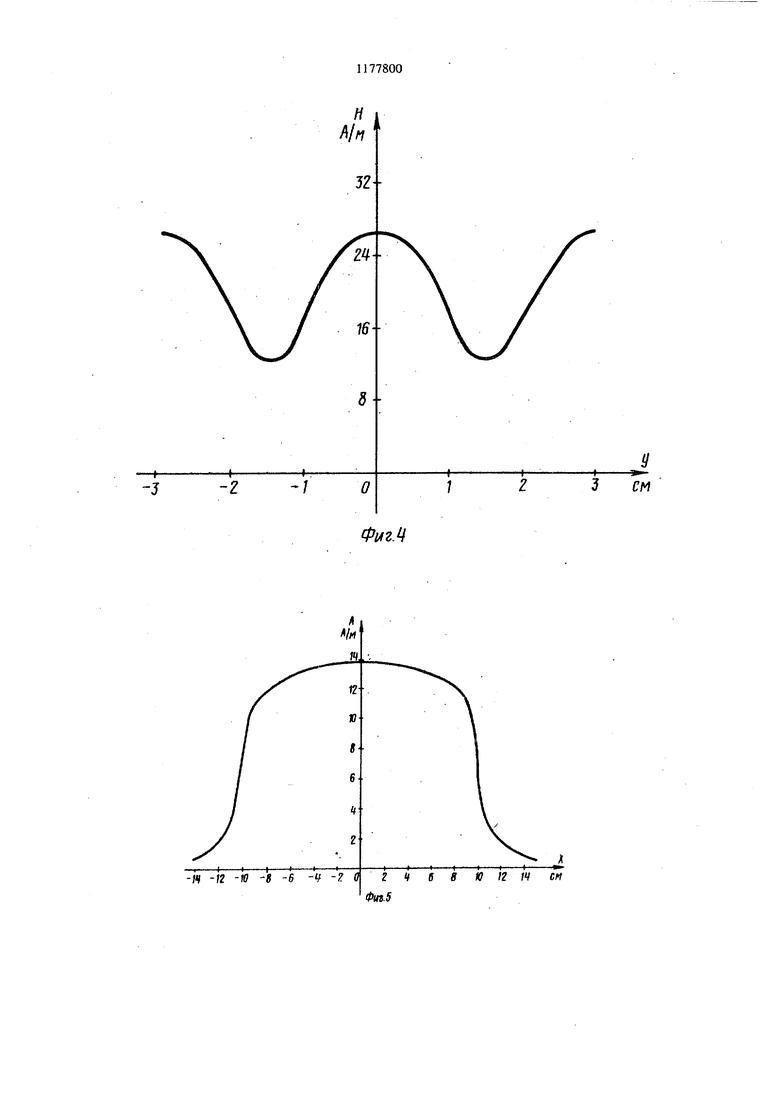
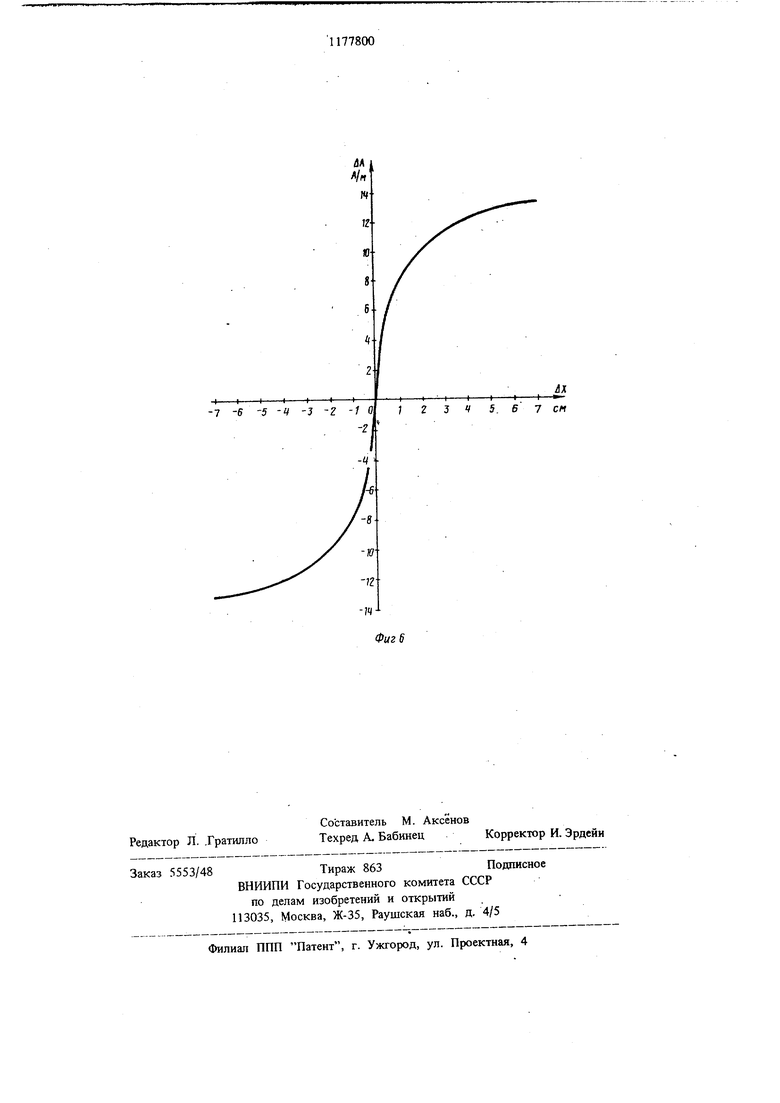
На фиг. 1 изображена блок-схема системы управления движением транспортных средств (ТС); на фиг. 2 - фрагмент полосы; на фиг. 3 - структурная схема блока слежения на фиг. 4 - график, изменения составляюще напряженности магнитного поля полосы, воспринимаемой датчиком блока, слежения при движении ТС вдоль полосы без поперечного смещения; на фиг. 5 - график зависимости а пплитуды колебаний составляющей напряженности магнитного поля полосы, воспринимаемый датчиком блока слежения при дв1-шени ТС, от поперечного смещения ТС относительно полосы; на фиг. 6 - график зависимоети разности амплитуд колебаний составляющей напряженности магнитного поля полосы, воспринимаемой датчиками блока слежения при движении ТС, от поперечного смещения ТС относительно полосы.
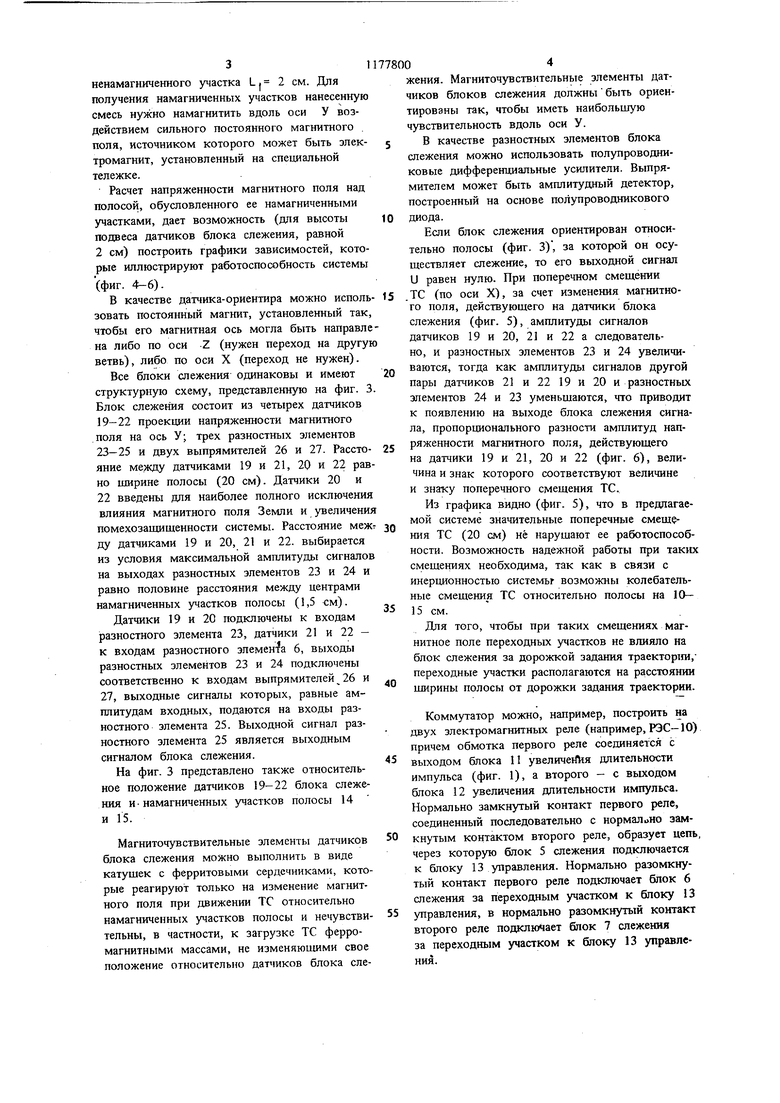
Система управления движением ТС содержит (фиг. 1 ) дорожку задания траектории, представленную ветвями 1 и 2, переходный участок 3 с одной ветви на другую, датчикориентир 4, блок 5 слежения за дорожкой задания траектории, блоки 6 и 7 слежения за переходным з истком, коммутатор 8, датчики 9 и 10, поворота, блоки 11 и 12 увелтения длительности импульса, блок 13 управления..
Между дорожкой задания траектории, переходными участками и блоками слежения связь Магнитная. Аналогичная связь между датчиками-ориентирами и датчиками поворота. Выходы блоков 5-7 слежения подключены соответственно к первому, второму и третьем входам коммутатора 8, выход которого соединен с входом блока 13 управления. Управляющие входы коммутатора 8 подключены к выходам соответствующих блоков 11 и 12 увеличения длительности импульса, входы которых соединены соответственно с выходами дапиков 9 и 10 поворота.
г1ри отсутствии сигналов с датчиков У и . 10 поворота коммутатор 8 подключает
блок 5 слежения к блоку 13 управления. Если ТС движется точно вдоль ветви 1 дорожки задания траектории, то сигнал на выходе блока 5 слежения отсутствует и блок 13 управления не изменяет направления движения Т(. При поперечном смещении ТС oTiroсительно в-тви 1 дорожки задания тра ктории на выходе блока 5 слежения появляется
сигнал, величина и знак которого соответствует величине и направлению смещения (фиг. 6). Этот сигнал поступает на блок 13 управления, который изменяет направление дыижения ТС таким образом, чтобы ликвиди, ровать смещение.
Для того, чтобы указать ТС на необходимость перехода на ветвь 2 дорожки задания траектории, датчик-ориентир 4, расположенный в месте ответвления дорожки, устанавливается так, чтобы воздействовать на датчик 9 поворота. Как только датчик 9 поворота оказывается над датчиком-ориентиром, он вырабатывает сигнал в виде импульса, поступающий на блок 11 увеличения длительности импульса, увеличивающий длительность последнего до 2-4с и подающий его на управляющий вход коммутатора 8, который по этому сигналу подключает блок 6 слежения за переходным участком к блоку 13 управления. К моменту срабатывания коммутатора 8 блок 6 слежения уже находится над переходным участком 3, т. е. дальще движетше продолжается вдоль переходного участка 3 в течение 24с, так как длина переходного участка не превышает 1-2 м. По истечении указанного времени импульс на выходе блока 11 увеличения длительности импульса пропадает и коммутатор 8 вновь подключает к блоку 13 управления блок 5 слежения, который уже находится над ветвью 2 дорожки задания траектории, следовательно, дальще движение проходит вдоль ветви 2 дорожки задания траектории.
Блок 7 слежения за переходным участком датчик 10 поворота и блок 12 увеличения длительности импульса предназначены для перехода на ветвь дорожки задания траектории, симметричную ветви 2 относительно ветви 1.
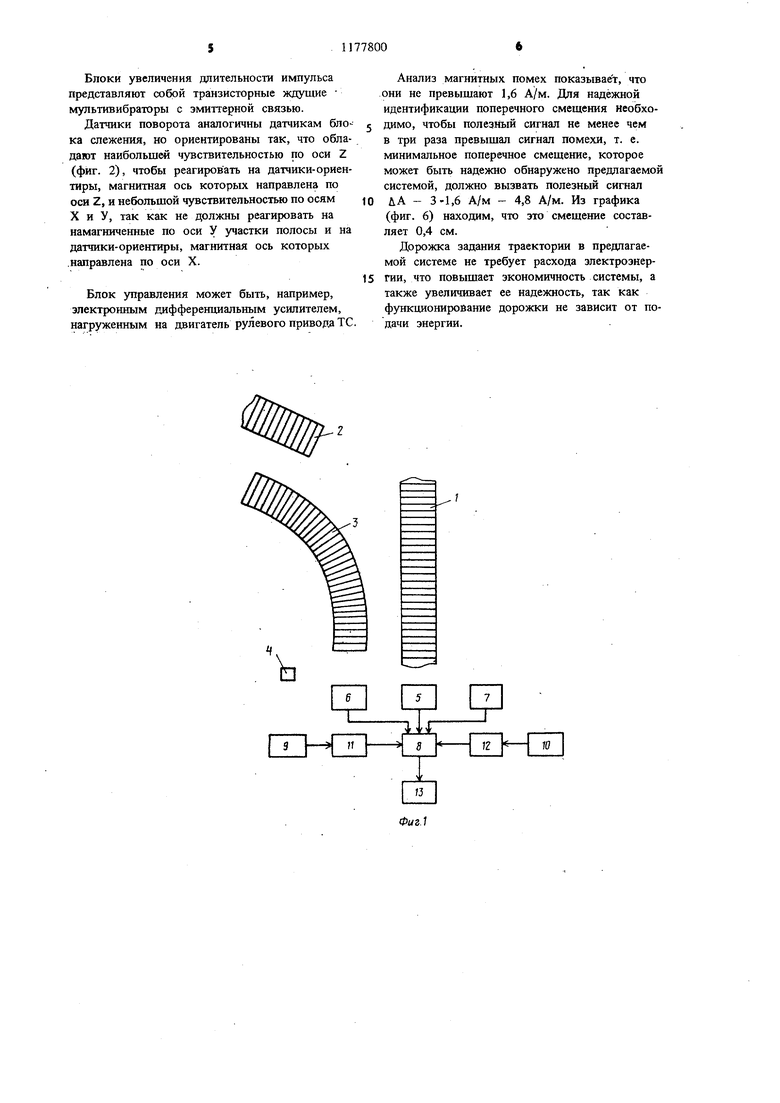
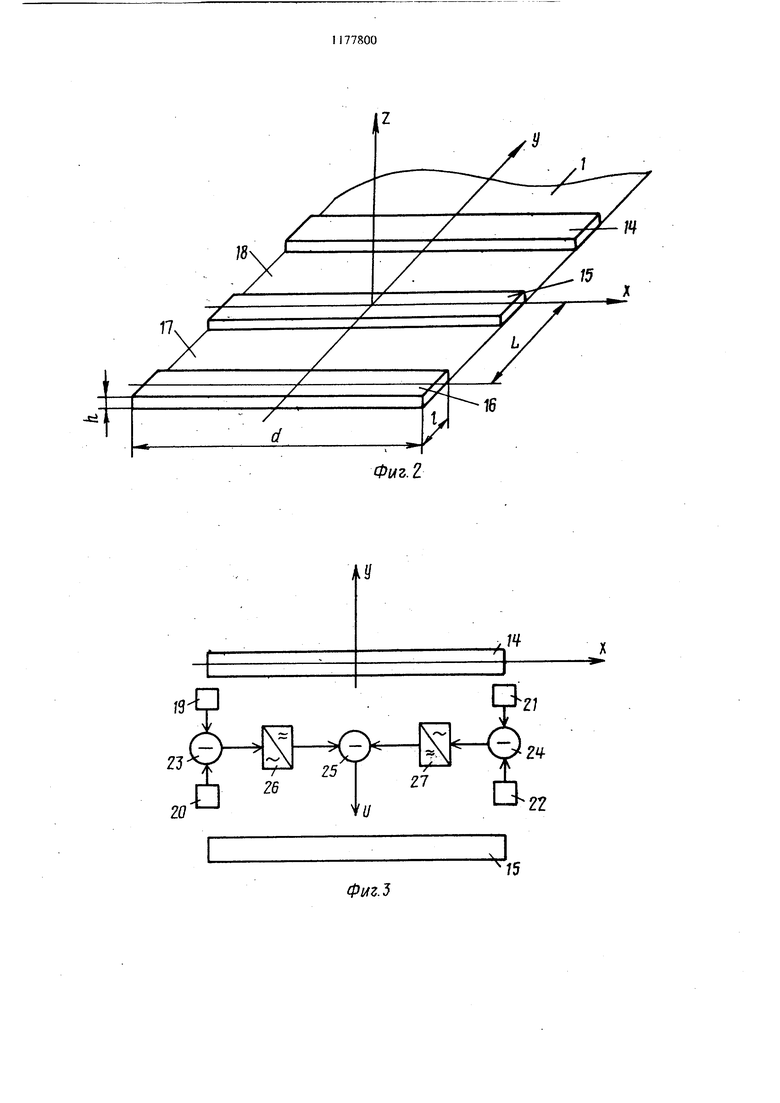
На фиг. 2 представлен фрагмент полосы 1, на которой сформирована последовательность прямоугольных чередующихся намагниченных 14-16 и ненамагниченных 17 и 18 участков, щирина которых равна щирине полосы. Основанием полосы может быть участок пола пеха (если пол сделан из неферромагнитного материала) или лента из неферромагнитного материала, укрепленная на полу. В качестве ферромагнитного материала для намагниченных участков можно использовать смесь порощка феррита бария (ВаО ,) и литопонных белил. Эта смесь обладает свойствами белил, т. е. легко может быть нанесена вручную или распылителем через трафарет, и хорощими магнитными свойствами феррита бария. Смесь можно, например, наносить участками шириной d 20 см, длиной Е 1 см и толщиной h 0,2 см. Расстояние между центрами намагниченных участков L 3 см, т. е. длина ненамагниченного участка L( 2 см. Для получения намагниченных участков нанесенную смесь нужно намагнитить вдоль оси У воздействием сильного постоянного магнитного поля, источником которого может быть элек тромагнит, установленный на специальной тележке. Расчет напряженности магнитного поля над полосой, обусловленного ее намагниченными участками, дает возможность (для высоты подвеса датчиков блока слежения, равной 2 см) построить графики зависимостей, кото рые иллюстрируют работоспособность системы (фиг. 4-6). В качестве датчика-ориентира можно испол зовать постоянный магнит, ус1ановленный так чтобы его магнитная ось могла быть направл на либо по оси Z (нужен переход на другу ветвь), либо по оси X (переход не нужен). Все блоки слежения одинаковы и имеют структурную схему, представленную на фиг. Блок слежения состоит из четырех датчиков 19-22 проекции напряженности магнитного поля на ось У; трех разностных элементов 23-25 и двух выпрямителей 26 и 27. Рассто яние ме.жду датчиками 19 и 21, 20 и 22 рав но ширине полосы (20 см). Датчики 20 и 22 введены для наиболее полного исключения влияния магнитного поля Земли и увеличени помехозащищенности системы. Расстояние меж ду датчиками 19 и 20, 21 и 22. выбирается из условия максимальной амплитуды сигнало на выходах разностных элементов 23 к 24 к равно половине расстояния между центрами намагниченных участков полосы (1,5 см). Датчики 19 и 20 подключены к входам разностного элемента 23, датчики 21 и 22 - к входам разностного элемен а 6, выходы разностных элементов 23 и 24 подключены соответственно к входам выпрямителей 26 и 27, выходные сигналы которых, равные амплитудам входных, подаются на входы разностного элемента 25. Выходной сигнал разностного элемента 25 является выходным сигналом блока слежения. На фиг. 3 представлено также относительное положение датчиков 19-22 блока слежения и-намагниченных участков полосы 14 и 15. Магниточувствительные элементы датчиков блока слежения можно выполнить в виде катушек с ферритовыми сердечниками, которые реагируют только на изменение магнитного поля при движении ТС относительно намагниченных участков полосы и нечувствительны, в частности, к загрузке ТС ферромагнитными массами, не изменяющими свое положение относительно датчиков блока слежения. Магниточувствительнь1е элементы датчиков блоков слежения должны быть ориентированы так, чтобы иметь наибольшую чувствительность вдоль оси У. В качестве разностных элементов блока слежения можно использовать полупроводниковые дифференциальные усилители. Выпрямителем может быть амплитудный детектор, построенный на основе полупроводникового диода. Если блок слежения ориентирован относительно полосы (фиг. 3), за которой он осуществляет слежение, то его выходной сигнал и равен нулю. При поперечном смещении ТС (по оси X), за счет изменения магнитного ноля, действующего на датчики блока слежения (фиг. 5), амплитуды сигналов датчиков 19 и 20, 21 и 22 а следовательно, и разностных элементов 23 и 24 увеличиваются, тогда как амплитуды сигналов другой пары датчиков 21 и 22 19 и 20 и разностных элементов 24 и 23 уменьшаются, что приводит к появлению на выходе блока слежения сигнала, пропорционального разности амплитуд напряженности магнитного поля, действующего на датчики 19 и 21, 20 и 22 (фиг. 6), величина и знак которого соответствуют величине и знаку поперечного смещения ТС. Из графика видно (фиг. 5), что в предлагаемой системе значительные поперечные смещения ТС (20 см) не нарушают ее работоспособности. Возможность надежной работы при таких смещениях необходима, так как в связи с инерционностью системы возможны колебательные смещения ТС относительно полосы на 10- 15 см. Для того, чтобы при таких смещениях магнитное ноле переходных участков не влияло на блок слежения за дорожкой задания траектории,переходные участки располагаются на расстоянии щирины полосы от дорожки задания траектории. Коммутатор можно, например, построить на двух электромагнитных реле (например, ЮС-10) причем обмотка первого реле соединяется с выходом блока 11 увеличейия длительности импульса (фиг. 1), а второго - с выходом блока 12 увеличения длительности импульса. Нормально замкнутый контакт первого реле, соединенный последовательно с нормалиио замкнутым контактом второго реле, образует цепь, через которую блок 5 слежения подключается к блоку 13 управления. Нормально разомкнутый контакт первого реле подключает блок 6 слежения за переходным участком к блоку 13 управления, в нормально разомкнутый контакт второго реле подключает блок 7 слежения за переходным участком к блоку 13 управления.
Блоки увеличения длительиости импульса представляют собой транзисторные ждущие мультивибраторы с эмиттерной связью.
Датчики поворота аналогичны датчикам блока слежения, но ориентированы так, что обладают наибольшей чувствительностью по оси Z (фиг. 2), чтобы реагировать на датчики-ориентиры, магнитная ось которых направлена по оси Z, и небольшой чувствительностыо по осям X и У, так как не должны реагировать на намагниченные по оси У участки полосы и на датчики-ориентиры, магнитная ось которых .направлена по оси X.
Блок управления может быть, например, электронным дифференпиальным усилителем, нагруженным на двигатель рулевого привода ТС.
Анализ магнитных помех показывает, что они не превышают 1,6 А/м. Для надёжной идентификации поперечного смещения необходимо, чтобы полезный сигнал не менее чем в три раза превышал сигнал помехи, т. е. минимальное поперечное смешение, которое может быть надежно обнаружено предлагаемой системой, должно вызвать полезный сигнал
ЛА-3-1,6 А/м - 4,8 А/м. Из графика (фиг. 6) находим, что это смешение составляет 0,4 см.
Дорожка задания траектории в предлагаемой системе не требует расхода электроэнергии, что повышает экономичность системы, а также увеличивает ее надежность, так как функщ1онирование дорожки не зависит от подачи энергии.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 1991 |
|
RU2018902C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭКВИДИСТАНТНЫМ ДВИЖЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА И СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВОГО И ЛИНЕЙНО-БОКОВОГО ОТКЛОНЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА ОТ ОПОРНОЙ ТРАЕКТОРИИ | 1992 |
|
RU2032926C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ИНТЕГРАЛЬНЫХ СХЕМ | 1971 |
|
SU419903A1 |
| ИНТЕГРИРОВАННАЯ ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ СИСТЕМА ОРИЕНТАЦИИ И НАВИГАЦИИ ДЛЯ ОБЪЕКТОВ, ДВИЖУЩИХСЯ ПО БАЛЛИСТИЧЕСКОЙ ТРАЕКТОРИИ С ВРАЩЕНИЕМ ВОКРУГ ПРОДОЛЬНОЙ ОСИ | 2008 |
|
RU2375680C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ ОБЪЕКТА | 1991 |
|
RU2042169C1 |
| УСТРОЙСТВО ДЛЯ РЕВЕРСИВНОГО НАМАГНИЧИВАНИЯ МНОГОПОЛЮСНЫХ МАГНИТОВ | 2001 |
|
RU2222843C2 |
| СПОСОБ ЭЛЕКТРОРАЗВЕДКИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2007 |
|
RU2354999C1 |
| ЭЛЕКТРОДВИЖИТЕЛЬ | 2020 |
|
RU2728275C2 |
| Устройство для управления электроннолучевой сваркой | 1980 |
|
SU899301A1 |
| КОМПЛЕКС БОРТОВОЙ АППАРАТУРЫ СИСТЕМ УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2005 |
|
RU2290681C1 |
СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА, содержащая дорожку задания траектории, установленные на транспортном средстве блок слежения за дорожкой задания траектории и блок управления, а также датчики-ориентиры, расположенные в местах ответвления дорожки задания траектории, отличающаяс я тем, что, с целью повышения экономичности и надежности системы, дорожка задания траектории выполнена в виде полосы, на которой сформирована последовательность прямоугольных чередующихся намагниченных и ненамагниченных участков, щирина которых равна ширине полосы, в местах ответвления дорожки задания траектории размещен переходный участок, представляющий собой криволинейный отрезок указанной полосы, параллельный линии сопряжения ветвей дорожки и. удаленный от них на расстояние, равное ширине полосы, а на транспортном средстве установлены два блока слежения за переход, ным участком, коммутатор, два блока уве- личения длительности импульса и два датчика поворота, причем выходы блока слежения . за дорожкой задания траектории, первого и второго блоков слежения за переходным участком соединены соответственно с первым, вторым и третьим входами коммутатора, выход (Л которого соединен с входом блока управления, а выходы первого и второго датчиков поворота соединены соответственно с входами первого и второго блоков увеличения длительности импульса, выходы которьрс соединены соответственно с четвертым и пятым входами коммутатора. sl 00
К
го
Фиг.2.
Фиг. 5
| Устройство для управления движением подвижного средства | 1978 |
|
SU708313A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Система управления движением транспортного средства | 1977 |
|
SU697980A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
