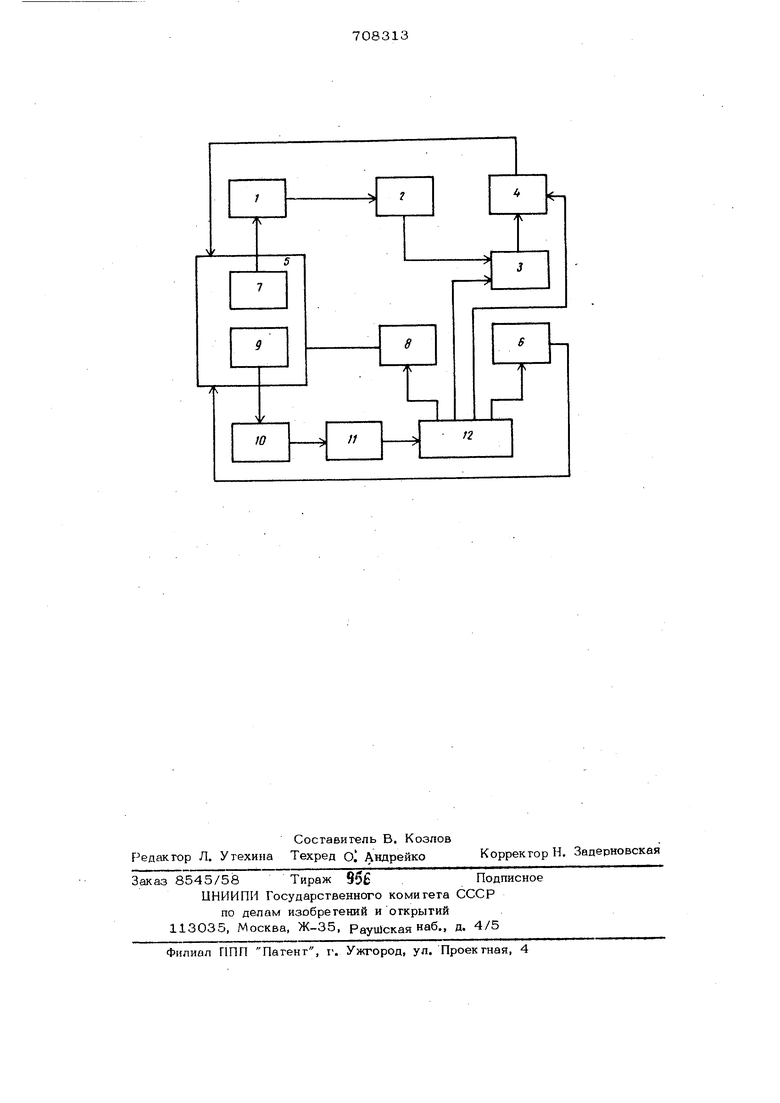
Изобретение относится к области технической кибернетики и предназначено дл распознавания объектов окружающей среды и принятия решений по взаимодействию подвижных механизмов со средой, в частности для ориентации и управления подви ными средствами. Известно устройство 1 для оптической ориентации подвижных механизмов, содержащее датчики положения, управляющую ЭВМ, рабочие органы и органы движения. Однако функциональные возможности такого устройства ограничены. г -1 Известно устройство L2J для управле шя движением подвижного средства, со- держащее последовательно соединенные основной фотодатчик, блок управления и исполнительный элемент, связанный с пер вым исполнительным органом, размещенным на опорной площадке. На площадке расположены второй исполнительный орга и дорожка задания траектории движения. через которую основной фотодатчик оптически связан с излучателем. Однако в гаком устройстве необходимо вмешательство операторе при переключении с одного работы на другой. Кроме того, оно не может быть применено для управления движением под вижного средства при наличии пересекающихся или разрывных траекторий, Целью изобретения является расщирение области применения устройства для управления движением подвижного средства. Для достижения этой цели устройство для управлевшя движением подвижного средства, содержащее последовательно соединенные основной фотодатчик, блок управления и исполни элемент, связанный с первым исполнительт ым органом, размещенным на опорной площадке, на которой расположены второй исполни телыпзТи орган и дорожка задания траектории движения, через которую основной фотодатчик оптически связан с излучателем, содержит кодовую дорожку и последоватепьно соединенные дополнигельный фогодагчнк, вычислительный блок и логический блок, выходы которого соединены соответственно с входами излучателя и второго исполнительного органа, и со вторыми входами первого исполнительного органа и исполнительного элемента. Кодовая дорожка выполнена на опорной площадке и оптически связана с дополнительным фотодатчиком. На чертеже дана cTpjTCTypHaH схема устройства. Онб содержит последовательно соединенные основной фогодатчик 1, блок 2 управления и исполнительный элемент 3, связанный с первым исполнительным органом 4, размещенным на опорной площадке 5, на которой расположены второй исполнительный орган 6 и дорожка 7 задания траектории движения, излучатель 8, кодовую дорожку 9 и последовательно сое диненные дополнительный фотодатчик 10, вычислительный блок 11 и логический блок 12. Устройство работает следующим образом. Излучатель 8 облучает дорожку задания траектории движения и кодовую дорожку 9, которые, флюоресцируют в видимей части спектра. Флюоресцентное излучение дорожки 7 воздействует на фотодатчик 1. При отклонении направления дви жения подвижного средства от дорожки 7 на выходе фотодатчика 1 появляется сш нал погрешности, который подается на блок 2 управления, усиливается и преобразуется Б командный сигнал, подаваемый на вход исполнительного элемента 3. Элемент 3 Корректирует направление движения подвижного средства так, что оно воз вращается на дорожку 7. Флюоресцентное излучение кодовой дорожки 9 воздействуе на фотодатчик 10, преобразующий светово излучение в электрический сигнал, который подается на вычислительный блок 11. Последний, в свою очередь, декодирует информацию от фотодатчика Ю а на ее основе вырабатывает командный сигнал. который через логический блок 12 подается на излучатель 8, исполнительный элемент 3 11 исполнительные органы 4 и осуществляет управление в соответствии с командами, записанными на кодовой дорожке 9. Использование кодовой пррожки, дополнительного фотодатчика и вычислительного блока с логическим блоком позволяет автоматизировать переключение подвижного средства с одного режима на другой и работать при наличии пересекающихся под любым углом и разрывных линий траекторрии, что существенно расширяет область применения подвижного средства. Формула изобретения Устройство для управления движением подвижного средства, содержащее последовательно соединенные основной фотодатчик, блок управления и исполнительный элемент, связанный с первым исполнительным органом, размещенным на Опорной площадке, на которой расположены второй исполнительный орган и дорожка задания траектории движения, через которую основной фотодатчик оптически связан с излучателем, отличающееся тем, что, с целью расщирения области применения устройства, оно содержит кодовую дорожку и последовательно соединенные дополнительный фотодатчик, вычислительный блок и логический блок, выходы которого соединены соответственно с входами излучателя и второго исполнительного органа и со вторыми входами первого исполнительного органа и исполнительного элемента, причем кодовая дорожка выполнена на опорной площадке и оптически связана с дополнительным фотодатчиком. Источники информации, принятые во внимание при экспертизе 1.Заявка Франции № 2324047, кл. Q О5 Д 1/03, опублик. 1977. 2.Патент США № 3970840, 2502О2, опублик. 1976 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 1991 |
|
RU2018902C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ РАБОЧИМ ОРГАНОМ ИЗБИРАТЕЛЬНОГО ДЕЙСТВИЯ ГОРНОПРОХОДЧЕСКОГО КОМПЛЕКСА | 2007 |
|
RU2360111C2 |
| УНИВЕРСАЛЬНО-РАСПРЕДЕЛЕННАЯ ГИБРИДНАЯ СИСТЕМА УПРАВЛЕНИЯ КОЛЛАБОРАТИВНЫМ МНОГОЦЕЛЕВЫМ РОБОТОМ С МАШИННЫМ ЗРЕНИЕМ | 2018 |
|
RU2710709C1 |
| ЛАЗЕРНАЯ СИСТЕМА УПРАВЛЕНИЯ ДОРОЖНО-СТРОИТЕЛЬНОЙ МАШИНОЙ | 1994 |
|
RU2090707C1 |
| КОМБИНИРОВАННОЕ УСТРОЙСТВО ИНТРУЗИВНОЙ МАРКИРОВКИ И ВЕРИФИКАЦИИ СИМВОЛОВ МАШИНОЧИТАЕМЫХ КОДОВ ПРЯМОГО НАНЕСЕНИЯ И ЛЮМИНЕСЦЕНТНЫХ СИМВОЛОВ И ИЗОБРАЖЕНИЙ | 2018 |
|
RU2693681C1 |
| Устройство для управления движением дорожно-строительной машины | 1990 |
|
SU1749336A1 |
| Устройство для прокладки маршрута адаптивного промышленного робота | 1980 |
|
SU882734A1 |
| СПОСОБ УПРАВЛЕНИЯ СООРУЖЕНИЕМ ПРОСТРАНСТВЕННО-РАСПРЕДЕЛЕННОГО ОБЪЕКТА | 1991 |
|
RU2034969C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ СТРОИТЕЛЬНОЙ МАШИНОЙ | 1994 |
|
RU2089708C1 |
| Способ создания трека пути движения для автономного движения подвижного объекта и способ осуществления автономного движения подвижного объекта по треку пути движения | 2018 |
|
RU2691679C1 |