1
Изобретение относится к подъемнотранспортному ма1ииностроению и может быть использовано при построении систем движения автоматического транспорта, преимущественно внутризаводского.
Известна система управления движением транспортного средства, в которой транспортное средство движется вдоль уложенного в пол кабеля, питаемого переменным током высокой частоты. Различные маршруты движения транспортного средства образуются замкнутыми- электрическими контурами, в каждый из которых подается переменное напряжение с различными частотами. В местах разветвлений маршрутов движения, где соприкасаются различные контуры, усганавливаются датчики-ориентиры. На транспортном средстве установлен блок слежения за трассой с датчиками слежения, представляющими собой резонансный контур, воспринимающий сигналы, излучаемые уложенным в пол кабелем. При подходе транспортного средства к разветвлению по сигналу датчика-ориентира в соответствии с программой движения перестраивается резонансная частота датчика слежения, тем самдм
выбирается дальнейший маршрут движения по кабелю контура, на частоту которого в данный момент настраивается датчик слежения 1.
Наиболее близкой к предлагаемэй
по -технической сущности является система управления движением транспортного средства, содержащая активную трассу-провод, установленные на
транспортном средстве блоки слежения за трассой и управления движением и датчики-ориентиры, расположенные в местах разветвлений трассы. Сеть:маршрутов в данной системе состоит
из отдельных замкнутых электрических контуров, подключаеких к генератору высокой частоты переключающими устройствами, установленными в пол в местах разветвления маршрутов. Срабатывание переключающих устройств происходит под действием сигналов с транспортного средства в соответствии с заданной программой движения по сигналам датчиков-ориентиров121
Известным системам присущи недостатки в построении транспортных схем движения и самого транспортного средства, а именно: сложная по исполнению трасса движения (наличие различных контуров, переключающих
средств, генераторов различных частот) и сложное оборудование самого транспортного средства (блоки слежения, оборудованные дополнительными устройствами слежения на различных частотах, дополнительные датчики, устройства воздействия на переключающие устройства трассы).
Цель изобретения - упрощение системы управления движением при сохранении хорошего качества прохождения ответвлений.
Указанная цель достигается тем, что в известной системе управления ; движением транспортного средства,содержащей активный провод трассы движения, установленные на транспортном средстве блоки слежения и управления и датчики-ориентиры, расположенные в местах ответвления активного провода и связанные с блоками слежения, активный провод, образующий трассу движения, в местах ответвления имеет ложный разрыв и места ложного разрыва перекрыты полосой металлической фольги, образующей пассивный участок трассы, а на транспортном средстве устанавливается блок слежения за пассивным участком трассы, связанный с блоком управления.
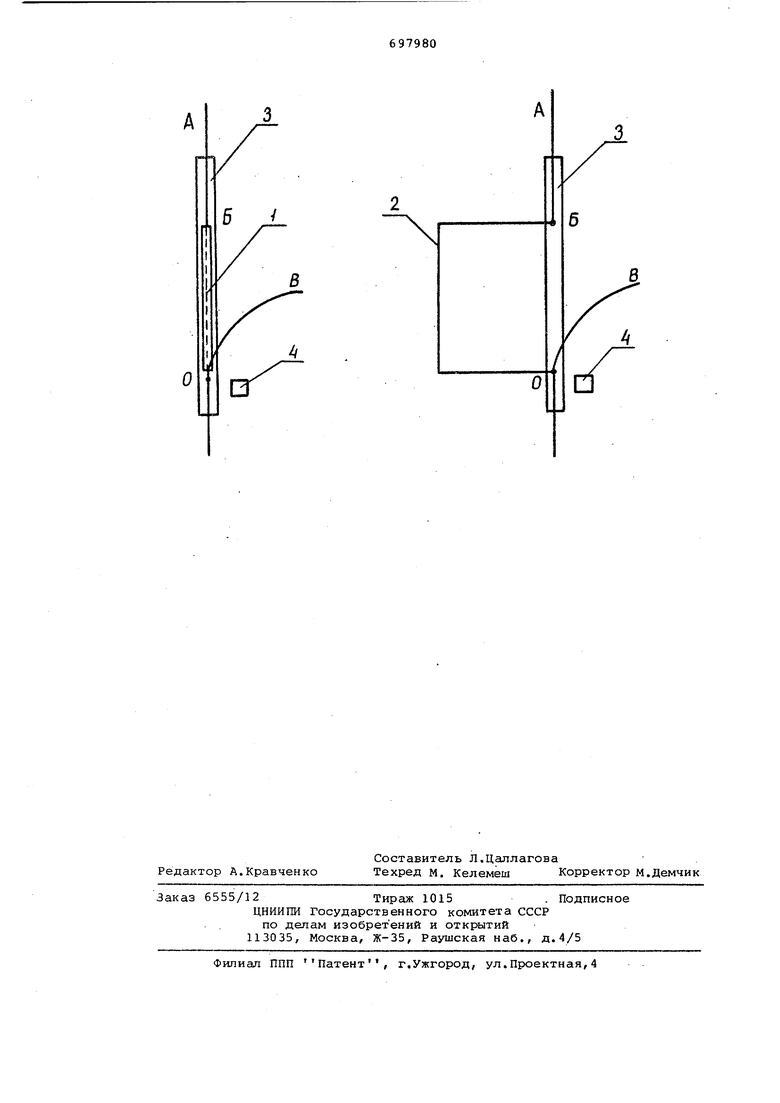
На чертеже изображена система управления движением транспортного средства (различные способы укладки активного провода).
Трасса движения строится таким образом, что на участке прямод}инейного движения ОА имеется ложный разрыв активного провода на участке ОБ, образованный либо экранированием активного провода экраном 1, либо со данием петлевого участка 2, участок .ложного разрыва активного провода перекрывается металлическим покрытием - металлической фольгой 3, о-бразующей пассивный участок трассы. На полу установлены датчики-ориентиры 4. Система содержит также блок слежения за активным проводом, блок управления и блок слежения за пассивным участком, которые установлены на транспортном средстве (на чертеже не указан) .
Из-за наличия ложного разрыва активного провода движение транспортногОсредства на участке ОБ невозможно без дополнительных сигналов. В
предлагаемой системе на транспортное средство поступает сигнал от датчикаориентира 4, установленного в полу у разветвления трассы, и в случае, если программой предусмотрено движение по участку ОА, блок слеж.ения за активным проводом отключается, включается блок слежения за участком и транспортное средство по его управляющим сигналам преодолевает участок ложного разрыва ОБ и после включения блока слежения за активным проводом продолжает движение по участку НА. Если программой предусмотрено движение по участку ОВ, блок слежения за активным проводом при прохождении датчика-ориентира 4 не отключается, и транспортное средство двигается по ответвлению ОБ.
Применение предлагаемой системы управления движением транспортных средств позволяет, упростить трассу движения за счет искл очения переключающих устройств и питания трассы от генератора с одной фиксированной частотой, а также сделать трассу легко переоборудуемой с учетом нужд производства, обеспечивает управляемое движение транспортного средства на всех участках трассы.
Формула изобретения
Система управления движением транспортного средства, содержащая активный провод, установленные на транспортном средстве блок слежения за- активным проводом и блок управления, соединенный с блоком слежения за активным проводом и с датчикамиориентирами, расположенными в местах ответвления активного провода, о тличающаяся тем, что, с целью упрощения системы, она содержит на активном проводе в местах его ответвления пассивный участок в виде металлического покрытия и блок слежения за пассивным участком, установленный на транспортном средстве и соединенный с блоком управления.
Источники информации, принятые во внимание при экспертизе
1.Патент Японии № 49-15196, кл. 54(7)2, опублик.1974,
2.Патент США № 3512601,
кл. 180-98, опублик.1974 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления движением транспортного средства | 1979 |
|
SU860012A1 |
| Система управления движением транспортного средства | 1979 |
|
SU960746A1 |
| Система управления движением транспортного средства | 1976 |
|
SU627450A1 |
| Устройство для управления движением транспортного средства | 1986 |
|
SU1317401A1 |
| СИСТЕМА УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 1991 |
|
RU2018902C1 |
| Устройство для управления движением транспортного средства | 1989 |
|
SU1735809A2 |
| Устройство для автоматического управления движением траспортного средства | 1977 |
|
SU690450A1 |
| Система управления транспортным средством | 1984 |
|
SU1242919A1 |
| Система управления движением транспортного средства | 1984 |
|
SU1228081A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПОДВИЖНЫМ ОБЪЕКТОМ | 1989 |
|
RU2015524C1 |