Изобретение относится к полиграфическому машиностроению, в частности для переналадки тракового транспортера машины бесшвейного скрепления книжных блоков. Цель изобретения - повышение производительности системы путем создания оптимального давления на подвижную губку транспортера. На чертеже представлена блок-схема системы. Система переналадки включает в себя задаюшее устройство и устройство привода зажимных траков. Задаюш,ее устройство содержит микропроцессор 1, выход которого связан с сумматором 2, а последний - с усилителем 3. Электродвигатель 4 через .ходовой винт 5 связан со стаканом 6, на котором закреплен датчик усилия 7. Между стаканом 6 и стаканом 8 подвижной губки 9 установлено упругое звено 10. Стакан 6 имеет продольный паз, в который входит винт 11, связываюший стаканы 6 и 8. В подвижную губку 9 упирается ножка датчика усилия 7. Неподвижная губка 12 имеет отверстие, через которое проходит ножка задатчика положения 13, связанного с кнопкой 14 включения устройства привода зажимных траков. Выход сумматора 15 соединен с входом усилителя 16, а последний - с электродвигателем 17. На рабочем органе транспортера 18 (зажимной тра к) датчик положения 19. Uj,.. Ua, U,, U - выходные сигналы микропроцессора 1, датчика усилия 7, задатчика позиции 13, датчика положения 19 соответственно. Система работает следующим образом. Задаюшее устройство настраивается при работающем агрегате, например, в период завершения технологических процессов пре дыдушего тиража. Для этого оператор настраивает микропроцессор 1 на соответствующую силу зажима блока, которая назначается с учетом конкретных физико-механических критериев. определенных экспериментально для различных бумаг, условий скрепления блоков, условий фальцевания, а также необходимого зажима блоков в зоне срезания корешков тетрадей, предусмотренного технологическим процессом. Один блок планируемого тиража устанавливают между губками 9 и 12,включают задаюшее устройство. Сигнал U, микропроцессора 1, проходя через сумматор 2, поступает на усилитель 3, оттуда на электродвигатель 4, который врашает ходовой винт 5, перемещая стакан 6. При этом пружина 10 находящаяся в стаканах 6 и 8, действует на подвижную губку 9, сжимающую книжный блок к неподвижной губке 12 с заданным усилием. Сигналы U, ..микропроцессора и LJ .датчика усили 7 сравниваются сумматором 2. При Ui- Ua 0перемещение подвижной губки 9 прекращается. Передвижение подвижной губки 9, связанной со стаканом 8, в исходное положение осуществляется через винт 11 стаканом 6. Так как подвижная губка 9 несет информацию об оптимальном положении зажимного трака, то задатчик положения 13, связанный с этой губкой программирует это положение, а при включении кнопки 14 реализует эту программу через устройство п квода зажимных траков. При этом сигнал U с задатчика положения 13 подается на cyNiматор 15, где сравнивается с сигналом U датчика пол.ожен.ия 19. Сигнал разбаланса системы (Uj - Us) проходя через усилитель 16, подается на электродвигатель 17, передающий движение рабочему органу транспортера 18. сигналы Uj заданного положения и отработанного будут равны, движение траков остановится. Использование предлагаемой автоматической системы управления переналадкой позволяет сократить время простоев агрегата при переналадке тракового транспортера.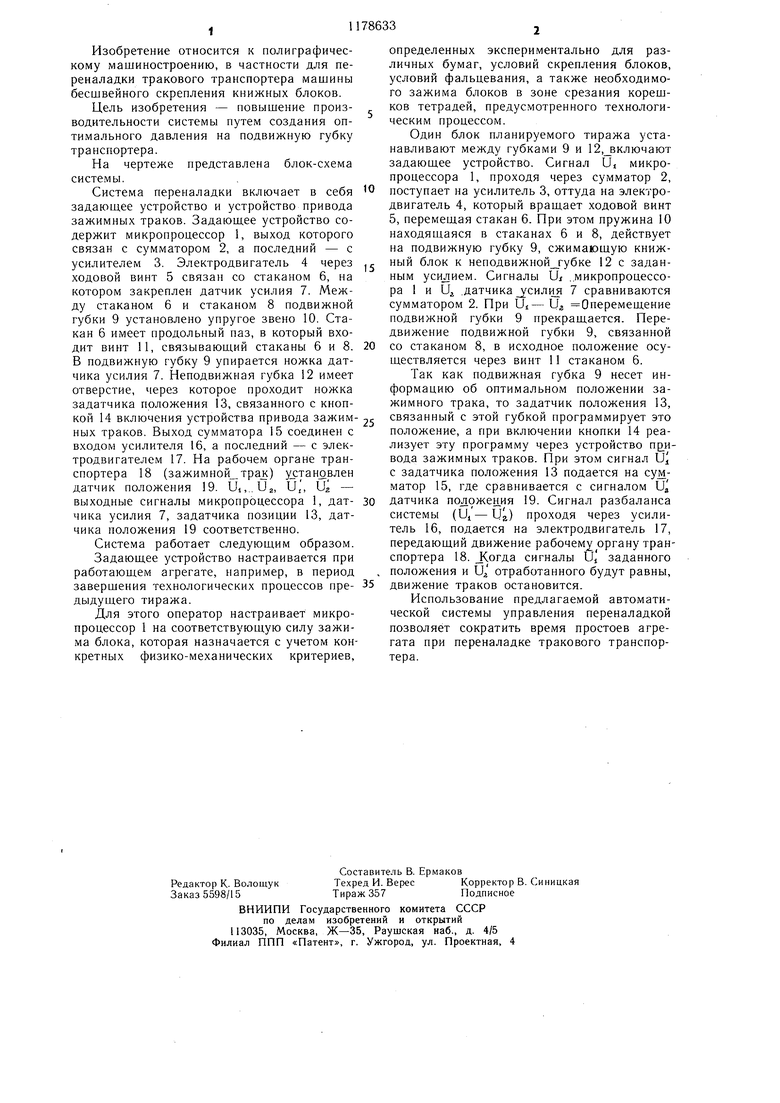
| название | год | авторы | номер документа |
|---|---|---|---|
| Система автоматической переналадки машины скрепления книжных блоков | 1988 |
|
SU1627421A1 |
| Механизм прижима одноножевой бумагорезальной машины | 1988 |
|
SU1785900A1 |
| Способ транспортировки книжных блоков на брошюровочно-переплетной линии и устройство для его осуществления | 1989 |
|
SU1743899A1 |
| Устройство для перемещения и колебаний сварочной горелки | 1988 |
|
SU1547995A1 |
| Устройство для управления сборочным роботом | 1986 |
|
SU1421529A1 |
| Устройство для передачи грузов между судами в море в условиях качки | 1980 |
|
SU893700A1 |
| Устройство для передачи грузов между судами в море в условиях качки | 1981 |
|
SU958217A1 |
| Устройство для управления двухобмоточным двигателем возвратно-поступательного движения | 1981 |
|
SU1103339A1 |
| Система автоматического ведения горнопроходческого щита | 1983 |
|
SU1122823A1 |
| Машина для вставки книжного блока в переплетную крышку | 1980 |
|
SU962011A1 |
СИСТЕМА ПЕРЕНАЛАДКИ ТРАКОВОГО ТРАНСПОРТЕРА КНИЖНЫХ БЛОКОВ, содержащая электродвигатель, кинематически связанный с механизмом передачи усилия на подвижную губку транспортера и неподвижную его губку, отличающаяся тем, что, с целью повышения производительности системы путем создания оптимального давления на подвижную губку транспортера, она имеет формирователь опорного сигнала, сумматоры, усилители, датчик усилия, датчик положения, задатчик положения, дополнительный электродвигатель, исполнительный механизм и переключатель, первый вывод которого связан с первым входом первого сумматора, выходом связанного через первый усилитель, дополнительный электродвигатель, исполнительный механизм и датчик положения с вторым входом первого сумматора, причем подвижная губка кинематически связана с задатчиком положения, электрически связанным с вторым выводом переключателя, и с датчиком усилия, электрически связанным с первым входом второго сумматора, вторым входом связанного с выходом формироватеI ля опорных сигналов, а выходом через второй усилитель - с электродвигателем. (Л 00 СГ) 00 00
| Приспособление с иглой для прочистки кухонь типа "Примус" | 1923 |
|
SU40A1 |
