1
Изобретение относится к системам автоматического регулирования.
Известны системы управления радиотелескопами в азимутальной монтировке, содержащие преобразователь экваториальных координат в азимутапьно-угломестные, выход которого в каждом канале управления подключен к входу привода, а к выходу привода подсоединен датчик обратной связи, выход которого подключен к входу преобразователя .
Наиболее близким к предлагаемому по технической сущности является устройство для управления радиотелескопом РТ-22 , содержащее преобразователь координат, входы которого через первый и агорой датчики обратной связи соединены соответственно с выходами привода канала азимута и привода канала угла места, а первый выход - с входом привода канала угла места t 3 .
Недостатком известного устройства является отсутствие компенсации взаимовлияния канала угла места на канал азимута, которое возникает вследствие того, что для малых углов рассогласования сигнал на входе ПК по азимуту является функцией от положения инструмента по углу места. Такое взаимовлияние не позволяет поднять до необходимого коэффициент
to усиления в приводе канала азимута, , что приводит к снижению точности.
Цель изобретения - повышение точности устройства для управления радиотелескопом за счет компенсации
5 взаимовлияния каналов ,управления.
Указанная цель достигается тем, что в устройство управления дополнительно введены корректирующий усилитель и третий датчик обратной связи,
го вход которого соединен с выходом привода канала угла места, а выход с первым входом корректирующего усилителя, второй вход которого
соединен с вторым выходом аналогового преобразователя координат, а выход - с входом привода канала азимута.
Кроме того, корректирующий усилитель содержит операционный усилител усилитель с регулируемым коэффициентом усиления, сглаживающий фильтр и источник импульсного прямоугольного напряжения, выходы которого содинены с соответствующими входами операционного усилителя, охваченного обратной связью через усилитель с переменным коэффициентом усиления и соединенного выходами с входом pГJ5laживaющeгo фильтра.
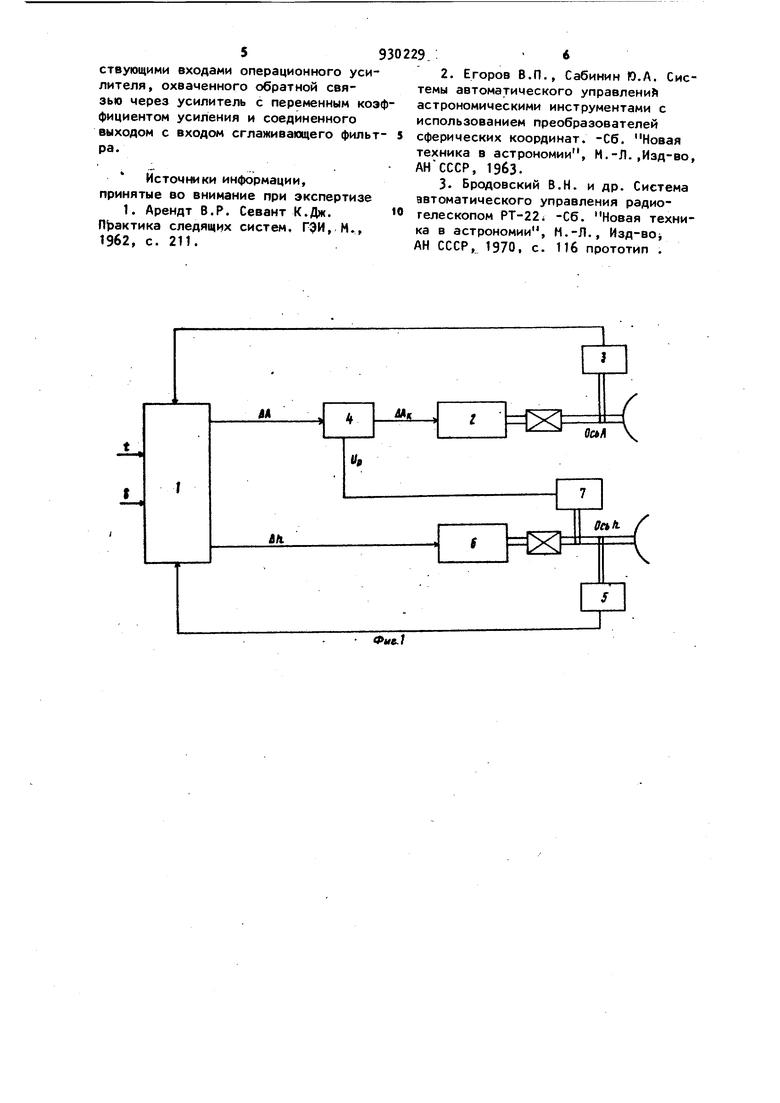
На фиг. .1 и 2 представлены функциональные схемы устройства.
Устройство содержит преобразователь 1 координат, привод 2 канала азимута, первый датчик 3 обратной связи (ДОС), корректирующий усилитель И, второй датчик S, обратной связи, привод 6 канала угла места, третий датчик 7 обратной связи.
Мэрректирующий уси/мтель k состоит из операционного усилителя 8, усилителя 9 с регулируемым коэффициентом усиления, источника 10 импульсного прямоугольного напряжения, состоящего из трансформ тора, гасящих сопротивлений
Dj, и
И стабилитронов Q,
сглаживающего фильтра 11.
Устройство управления работает следующим образом.
Сигнал управления преобразователя 1 координат поступает на второй вход корректирующего усилителя на первый вход которого подается корректирующее напряжение.
В корректирующем усилителе А осуществляется коррекция входного сигнала таким образом, что на входе привода 2 канала азимута сигнал рассогласования не зависит от положения инструмента по углу места, вслествие чего повышается точность наведения по азимуту и, вместе с тем, общая точность наведения системы управления.
Корректирующий усилитель работает следующим образом.
Сигнал постоянного тока & А поступает на первый вход операционного усилителя 8, который собран на интегральной схеме. Преобразование входного сигнала из постоянного в импульсный осуществляется за счет
питания операционного усилителя 8 импульсным прямоугольным напряжением образуемым на стабилитронах D, В„, Переменная составляющая выходного напряжения операционного усилителя 8 поступает на первый вход усилителя 9 с регулируемым коэффициентом усиления, в качестве которого использован дифференциальный интегральный усилитель. С выхода усилителя 9 инвертированный сигнал поступает на второй неинвертирующий вход операционного усилителя 8, осуществляя тем самым отрицательную обратную связь последнего.
. Усилитель 9 с регулируемым коэффициентом усиления выполняет роль множительного устройства, введенного в обратную отрицательную связь операционного усилителя 8.
Сглаживание выходного сигнала корректирующего усилителя k осуществляется за счет RC-фильтра.
Введение предложенной коррекции позволяет cyщectвeннo повысить точность управления угловыми разворотами радиотелескопа;
Формула изобретения
1.Устройство для управления разворотами радиотелескопа, содержащее преобразователь координат, входы которого через первый и второй датчики обратной связи соединены соответственно с выходами привода канала азимута и привода канала угла места, а первый выход - с входом привода канала угла места, отличающееся тем, что, с целью повышения точности устройства, в него введены корректирующий усилитель и третий датчик обратной связи, вход которого связан с выходом привода канала угла места, а выход - с первым входо корректирующего усилителя, второй вход которого соединен с вторым выходом преобразователя координат, а выход - с входом привода канала азимута.
2.Устройства по п.1, отличающееся тем, что, корректирующий усилитель содержит операционный усилитель, усилитель с регулируемым коэффициентом усиления, сглаживающий фильтр и источник импульсного прямоугольного напряжения выходы которого соединены с соответствующими входами операционного уси лителя, охваченного обратной связью через усилитель с переменным коэ фициентом усиления и соединенного выходом с входом сглаживающего фильт ра. Источники информации, принятые во внимание при экспертизе 1. Арендт В.Р. Севант К.Дж. Практика следящих систем, Г9И, М 1962, с. 211. 29. 2.Егоров В.П., Сабинин Ю.А. Системы автоматического управлений астрономическими инструментами с использованием преобразователей сферических координат. -Сб. Новая АТсССР. 3.Бродовский В.Н. и др. Система автоматического управления радиотелескопом РТ-22. -Сб. Новая техника в астрономии, Н.-Л., Изд-во АН СССР,„ 1970. с. 116 прототип
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящая система | 1986 |
|
SU1383286A1 |
| И. Г. Моисеев,И. И. Погожее, Ю. Н. Семенов и Н. М. Якименко | 1965 |
|
SU174689A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО НАВЕДЕНИЯ РАДИОТЕЛЕСКОПА | 2006 |
|
RU2319171C1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| ОПТИКО-ЭЛЕКТРОННОЕ ЛОКАЦИОННОЕ УСТРОЙСТВО | 2005 |
|
RU2304792C1 |
| СИСТЕМА НАВЕДЕНИЯ ТЕЛЕУПРАВЛЯЕМОЙ РАКЕТЫ | 2000 |
|
RU2191345C2 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ С АВТОМАТИЧЕСКОЙ КАЛИБРОВКОЙ | 2008 |
|
RU2389038C2 |
| Система управления телескопом | 1980 |
|
SU972479A1 |
| СТЕНД ДЛЯ КОНТРОЛЯ ПРЕЦИЗИОННОГО ГИРОСКОПИЧЕСКОГО ДАТЧИКА УГЛОВОЙ СКОРОСТИ | 1992 |
|
RU2044274C1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2313894C1 |

930229
к «
5
LJ
О
-tj-LAflJuH
«
Р
РЧ dHHi
