1
Изобретение относится к электротехнике и может быть использовано для регулирования моментов двух -электродвигателей в электромеханичеких следующих систенах.
Целью изобретения является повышение КПД путем выравнивания моментов нагрузки.
На чертеже представлена схема предлагаемого электропривода.
Электропривод содержит электродвигатели 1 и 2, последовательно соединенные первый сумматор 3, релейный регулятор 4, усилитель мощно ти 5, выход которого подключен .к якорной обмотке электродвигателя 1, последовательно соединенные второй сумматор 6, релейный регулятор 7, усилитель мощности 8, выход которого подключен к якорной обмотке электродвигателя 2,валы электродвигателей 1 и 2 через редукторы 9 и 10 соединены с валом нагрузки 11 ,датчик скорости 12 электродвигателя 1 соединен с входом первого сумматора 3, выход датчика момента 13 электродвигателя 1 подключен к входам первого сумматора 3 и суммирующего усилителя 14, выход датчика момента 15 электродвигателя 2 соединен с вторым входом первого суммирующего усилителя 14, выходы датчиков напряжений 16 и 17 подключены к входам второго суммирующего усилителя 18, выходы суммирующих ус лителей 14 и 18 подключены к входу второго сумматора 6, выход датчика напряжений 16 подключен также к входу первого сумматора 3, измеритель угла рассогласования 19, входы которого соединены с выходом задатчика входнрго сигнала 20 и .датчиком угла поворота 21 вала нагрузки.
Электропривод с выравниванием нагрузок электродвигателей работа- ; ет следующим образом.
В исходном положении приводные электродвигатели 1 и 2 неподвижны. Если при этом отсутствует разность сигналов YII задания положения вала нагрузки 11 объекта регулирования и Y фактического положения этого вала на входе сумматора 3, то релейный регулятор 4 устанавливается 3 одно из устойчивых положений, вьщавая на вход усилителя мощности 5 максимальное напряжение управлени
95152 .
при этом усилитель мо1цности 5 также имеет на выходе максимальное напряжение. Увеличение напряжения на выходе усилителя мощности 5 ведет к 5 появлению сигнала на выходе датчика напряжения 16. .Этот сигнал поступает с отрицательным знаком на вход сумматора 3, что ведет к переключению релейного регулятора 4 в другое
положение, при котором усилитель
мощности 5 т.акже имеет на выходе напряжение обратной полярности. Это в свою очередь вызывает изменение знака выходного напряжения на датчике 16 напряжения и т.д. Таким образом, при отсутствии разности сигналов Y - релейный регулятор 4 и усилитель мощности 5 переключаются из одного устойчивого положения
в другое с высокой частотой, т.е. работают в скользящем режиме.
Переключение полярности напряжения на выходе датчика 16 с частотой скольжения вызьшает появление
скользящего режима работы релейного регулятора 7 и усилителя мощности 8 через второй суммирующий усилитель 18 и датчик напряжения 17. Скважность напряжения питания
каждого электродвигателя 1 и 2 в этом случае равна 0,5, а среднее напряжение U и U на их якорях равно нулю, что обеспечивает их неподвижность и нагрузки 11.
При появлении на входе сумматора 3 положительной разности - Y изменяется скважность напряжения на выходе релейного регулятора 4 и усилителя мощности 5, что ведет к увеличению среднего напряжения 0
на электродвигателе 1, который начинает развивать вращающий момент, передаваемый через редуктор 9 нагрузке 11.
Иовьлпение среднего напряжения (/ на электродвигателе 1 1через датчик напряжения 16 и второй суммирующий усилитель 18 вызьшает изменение скважности напряжения на ,выходе
релейного регулятора 7 и напряжения и на выходе усилителя мощности 8, электродвигатель 2 также начнет развивать вращающий момент, передаваемый на нагрузку 11 объекта
регулирования через редуктор 10.
Движение электродвигателя 1 и 2 продолжается до тех пор, пока нагрузка 11 объекта регулирования не
.31
повернется на заданный угол и сигнал Y . на выходе датчика угла по. ворота 21 вала нагрузки объекта регулирования не будет равен сигналу ч. на выходе задатчика 20 входного сигнала.
Вращающие моменты М, и М,2 электродвигателей 1 и 2 контролируются. датчиками моментов 13 и 15 соответственно. Сигналы с выхода этик датчиков сравниваются в суммирующем : усилителей 14, на выходе которого формируется сигнал iM , пропорциональньй разности моментов М, и Mj т.е. ,(M,/MJ).
В процессе работы электродвигателей 1 и 2 контролируется скорость электродвигателя 1, сигнал от датчика 12 скорости поступает с отрицательным знаком на вход первого сумматора 3.
Таким образом, устройство для выравнивания нагрузок электродвигателей работает j реализуя следзпощие горитмы управления: для электродвигателя 1
U,UMaKc- C i -4 -S« 9« . для электродвигателя 2
Uг-Uмo,(2)
где 03, /А, и - соответственно скорость, момент и напряжение электродвига- с телей.
95154
Составляющая Кац) О в алгоритме
(1)обеспечивает работу релейного регулятора 4 в скользящем режиме, а составляющие KocW (
5 устойчивое движение электродвигателя при отработке сигнала лУ,
Составляющая К/ & U в алгоритме
(2)обеспечивает работу релейного 10 регулятора 7 в скользящем режиме,
стремясь свести движение электродвигателя 2 с вращающим моментом ,, т.е. при йМ .
Повышение коэффициента полезного
15 действия в электроприводе обеспечивается введением релейных регулято- ров 4 и 7, работающих в скользящем режиме при подаче на их входы опреQ деленных обратных связей в соответствии с алгоритмами управления (1) и (2). При отклонении параметров любого из электродвигателей, например, из-за технологического разброса при их изготовлении, разной температуры нагрева или других причин вследствие больших коэффициентов усиления при скользящем режиме работы регуляторов возникающая разность ДМ вращающих моментов вызывает такое изменение напряжения 2 питания второго электродвигателя, при котором величина Д М уменьшается, стремясь к минимальной величине, определяемой реальной чйстотой скользящего режима работы ре- лейных регуляторов.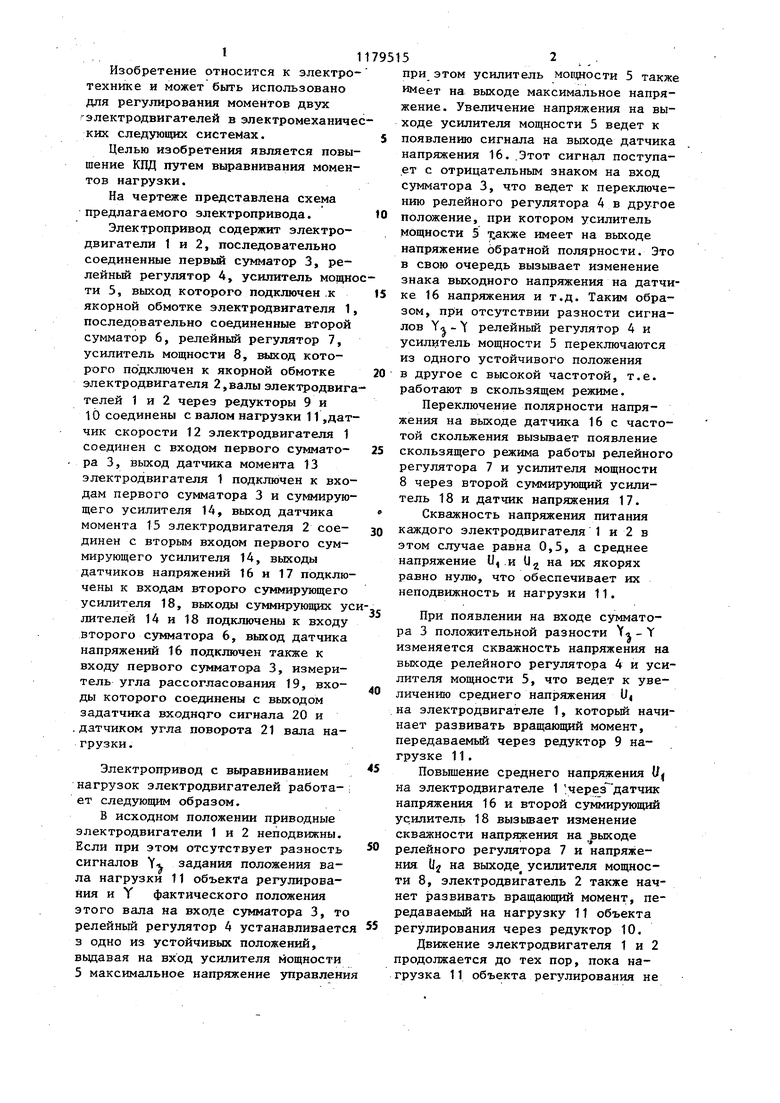
| название | год | авторы | номер документа |
|---|---|---|---|
| Вентильный электропривод | 1985 |
|
SU1282301A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПАРАМЕТРАМИ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2414048C1 |
| Следящий электропривод | 1991 |
|
SU1833828A1 |
| Система поддержания заданного соотношения скоростей | 1983 |
|
SU1136291A1 |
| Электропривод по системе генератор-двигатель | 1982 |
|
SU1078564A1 |
| Электропривод клети прокатного стана | 1981 |
|
SU970615A1 |
| ЭЛЕКТРОПРИВОД | 2003 |
|
RU2254665C2 |
| Частотно-управляемый электропривод | 1989 |
|
SU1720138A1 |
| Устройство для стабилизации частоты вращения двигателя постоянного тока | 1984 |
|
SU1264284A1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД | 1994 |
|
RU2060530C1 |
ЭЛЕКТРОПРИВОД С ВЫРАВНИВАНИЕМ НАГРУЗОК, содержащий электродвигатели, первый сумматор, связанный с первым усилителем мощности, выход которого подключен к якорной обмотке первого электродвигателя, датчик скорости первого электродвигателя, выходом подключенньш к входу первого сумматора, датчик момента первого электродвигателя, выход которого подключен к входам первого суммирующего усилителя и первого сумматора соответственно, второй сумматор, связанный с вторым усилителем мощности, выход которого подключен к якорной обмотке второго электродвигателя, датчик момента второго электродвигателя, выход которого соединен с вторым входом первого суммирующего усилителя, измеритель угла рассогласования, входы которого соединены с выходом задатчика входного сигнала и датчиком угла поворота вала нагрузки, соединенным через редукторы с люфтом с валами электродвигателей, отличающийся тем, что, с целью повышения КПД путем вьфавнивания моментов нагрузки, в него дополнительно введены два релейных регулятора, два датчика напряжений и второй суммирующий усилитель, при этом вход первого релейного ре$ гулятора соединен с выходом первого (Л сумматора, а выход - с входом первого усилителя мощности, вход второго релейного регулятора соединен с выходом второго сумматора, а выход - с входом второго усилителя мощности, выходы суммирующих усилителей соединены с входом втоKj рого сумматора, к входам второго со ел суммирующего- усилителя подключены ,выходы датчиков напряжения первого и второго электродвигателей, к входупервого сумма-тора подключен также ел выход датчика напряжения первого электродвигателя.
| Патент США № 3512425, кл | |||
| Приспособление в центрифугах для регулирования количества жидкости или газа, оставляемых в обрабатываемом в формах материале, в особенности при пробеливании рафинада | 0 |
|
SU74A1 |
| Следящая система с компенсацией лифта механической передачи | 1976 |
|
SU620940A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
