1
Изобретение откосится к электротехнике, в частности к вентильным электроприводамJ и может быть исполь12
зовано в следяп1;их системах и приводах с программным управлением.
Цель изобретения - улучшение рвачества регулирования и повышение на дежности...
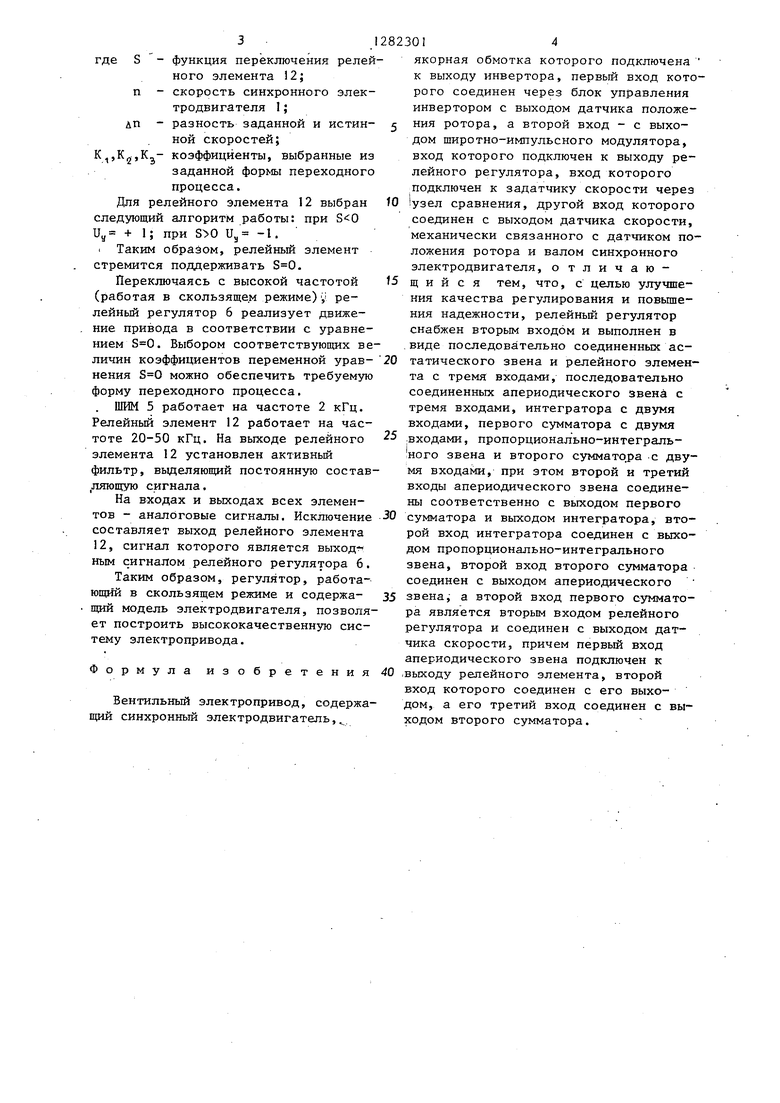
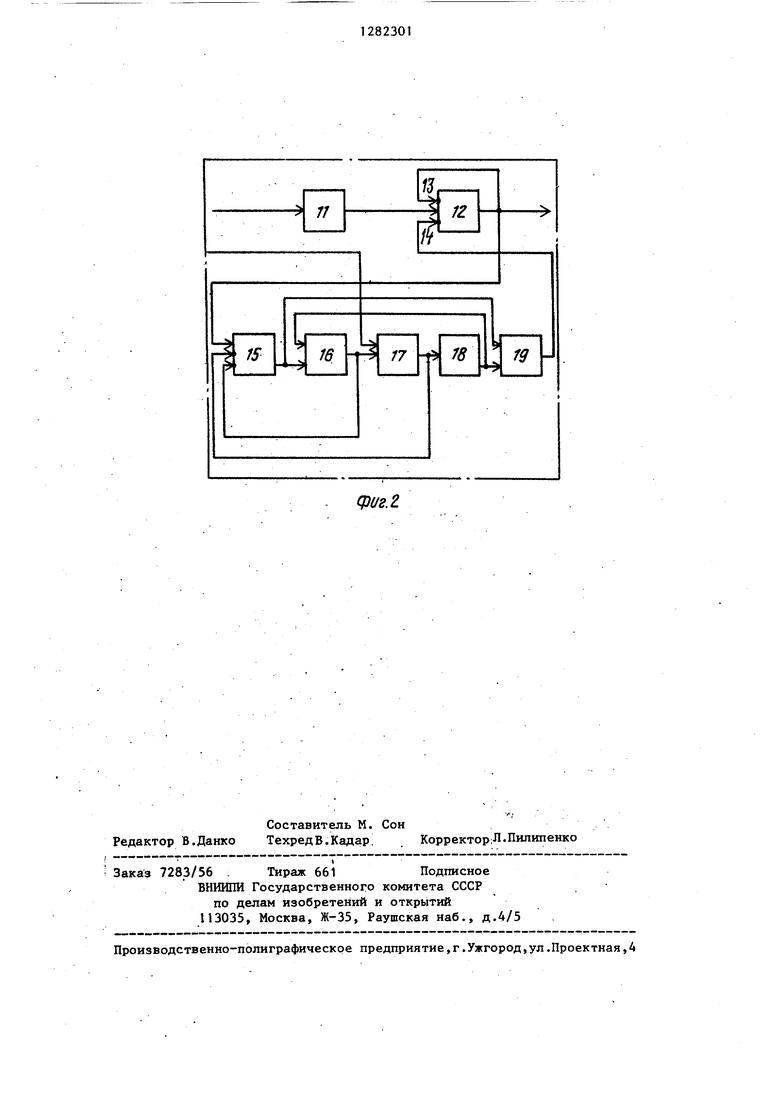
На фиг.1 и 2 представлены соответственно блок-схема вентильного электропривода и функциональная схема .релейного регулятора.
Вентильньш электропривод (фиг.1) содержит синхронный электродвигатель 1, якорная обмотка которого подклгаче- на к выходу инвертора 2, первый вход которого соединен через блок 3 управ- лен.ия инвертором с выходом датчика 4 положения ротора., а второй вход - с выходом шпротно-иг-шульсного модулято- ра (ЖМ) 5, вход KOTOpoi o подключен к выходу релейного регулятора 6, вход которого подключен -к задатчику 7 скорости через узел 8 сравнения, другой вход которого соединен с выходом датчика 9 скорости, связанного с датчиком 4 положения ротора и валом син- хроиного электродвигателя 1, .
Релейньй регулятор 6 (фиг.2) снабжен вторьш входом 10 и выполнерр Б виде последовательно соединенных астатического звена I1 и релейного элемента 12 с тремя входами, при этом выход релейного элемента 12 соединен с вторым своим входом 13 непосредст- венно, а с третьим своим входом 14 - посредством последовательно соединенных апериодического звена 15 с тремя входами, интегратора 16 с двумя входами, первого сумматора 17 с двумя входами, пропорционально-интегрального звена 18 и второго сумматора 19 с двумя входами, причем второй и третий входы апериодического звена соединены соответственно с выходом первого сумматора 17 и выходом интегратора 16, второй вход интегратора 16 - с .выходом пропорционально-интегрального звена 18, второй вход второго -сумматора 19 соединен с выходом аперио- днческого звена 15, а т торой вход первого сумматора 17 - с выходом датчика 9 скорости.
Все элементы релейного регулятора 6 - астатическое звено 11, релейный элемент 12, апериодическое звено 15, интегратор 16, сумматоры 17 и 19, а также пропорционально-интегральное
10
25
ЗО.
823012
звено 18 выполнены на интегральных микросхемах серии К 55 УД 2А.
Вентильный электропривод работает след аоищм образом.
На вход узла 8 сравнения поступает заданный сигнал Uj и сигнал с выхода датчика 9 скорости. Сигнал с узла 8 сравнения поступает на вход астатического звена 11 и с его выхода на первый вход релейного элемента 2. Сигнал с выхода релейного элемента 12 поступает на вход ВЛ-М 5, причем его величина определяет величину напряжения, питающего электродвигатель 1 (,KUy ) , Этот же сигнал U у поступает на второй вход 13 релейного элемента 12 и на вход апериодического звена 15 (при этом сигнал U.,-, образующийся на вьпсоде релейного эле- мента 12, содержит регулируемую вели- чину и две ее производные), на выходе которого образуется сигнал, про порциональный току электродвигателя 1, На выходе интегратора 16 образуется сигнал, пропорциональный скорости электродвигателя 1. Истинная скорость электродвигателя 1 на выходе датчика 9 скорости и скорость на модели электродвигателя на вьпсоде интегратора 16 сравниваются в первом сумматоре
17,и их разность поступает на вход пропорционально-интегрального звена
18,на выходе которого формируется сигнал, пропорциональный моменту нагрузки электродвигателя 1, На втором сумматоре 19 суммируются сигнал с выхода апериодического звена 15,пропорциональный току двигателя, и сигнал с выхода пропорционально-интегрального звена 8, пропорционалыагй моменту (току)нагрузки. На выходе второго сумматора 19 формируется сигнал, пропорциональный первой производной от скорости двигателя, кото- рьй поступает на третий вход релейного элемента 12,
30
35
40
45
Сигналы с выхода первого суммато- ра 17 и выхода пропорционально-интегрального звена 18 поступают соответственно на второй вход апериодического звена 15 и второй вход интегратора 16, корректируя модель электродвигателя 1 .
В результате на вход релейного элемента 12 поступает сумма сигналов, именуемая функцией переключения
, Jundt - an -t К.,;П + КдП,
где S - функция переключения релей
ного элемента 12; п - скорость синхронного электродвигателя 1;
дп - разность заданной и истинной скоростей;
коэффициенты, выбранные из заданной формы переходного процесса.
Для релейного элемента 12 выбран следующий алгоритм работы: при Uy + 1; при U,, -I. I Таким образом, релейный элемент стремится поддерживать .
Переключаясь с высокой частотой (работая в скользящем режиме)у ре- лейньй регулятор 6 реализует движение привода в соответствии с уравнением . Выбором соответствующих величин коэффициентов переменной уравнения можно обеспечить требуемую форму переходного процесса.
ШИМ 5 работает на частоте 2 кГц. Релейньй элемент 12 работает на частоте 20-50 кГц. На выходе релейного элемента 12 установлен активный фильтр, вьщеляющий постоянную состав- ,ляющую сигнала.
На входах и выходах всех элементов - аналоговые сигналы. Исключение составляет выход релейного элемента 12, сигнал которого является выход- - ным сигналом релейного регулятора 6. Таким образом, регулятор, работающий в скользящем режиме и содержащий модель электродвигателя, позволяет построить высококачественнзпо систему электропривода.
Формула изобретения
Вентильный электропривод, содержащий синхронный электродвигатель,
823014
якорная обмотка которого подключена к выходу инвертора, первый вход которого соединен через блок управления инвертором с выходом датчика положе- 5 ния ротора, а второй вход - с выходом щиротно-импульсного модулятора, вход которого подключен к выходу релейного регулятора, вход которого подключен к задатчику скорости через fO узел сравнения, другой вход которого соединен с выходом датчика скорости, механически связанного с датчиком положения ротора и валом синхронного электродвигателя, отличаю- 5 щ и и с я тем, что, с целью улучшения качества регулирования и повышения надежности, релейный регулятор снабжен вторым входом и выполнен в .виде последовательно соединенных ас- 0 татического звена и релейного элемента с тремя входами, последовательно соединенных апериодического звена с тремя входами, интегратора с двумя входами, первого сумматора с двумя 5 ,входами, пропорционально-интеграль- ного звена и второго с-;гммато.ра с двумя входами, при этом второй и третий входы апериодического звена соединены соответственно с выходом первого 0 сумматора и выходом интегратора, второй вход интегратора соединен с выходом пропорционально-интегрального звена, второй вход второго сумматора соединен с выходом апериодического 5 звена, а второй вход первого сумматора является вторым входом релейного регулятора и соединен с выходом датчика скорости, причем первый вход апериодического звена подключен к 0 ,выходу релейного элемента, второй вход которого соединен с его выходом, а его третий вход соединен с выходом второго сумматора.
фиг..
| название | год | авторы | номер документа |
|---|---|---|---|
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1990 |
|
RU2011286C1 |
| Вентильный электропривод | 1983 |
|
SU1234940A1 |
| Электропривод с двухзонным регулированием скорости | 1983 |
|
SU1185516A1 |
| Электропривод постоянного тока | 1983 |
|
SU1115188A1 |
| Электропривод лебедки экскаватора-драглайна | 1991 |
|
SU1775832A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2313894C1 |
| Электропривод постоянного тока | 1984 |
|
SU1358059A1 |
| Вентильный электропривод | 1985 |
|
SU1274105A1 |
| БЫСТРОДЕЙСТВУЮЩИЙ АДАПТИВНЫЙ РЕГУЛЯТОР ЧАСТОТЫ ВРАЩЕНИЯ ЭЛЕКТРОДВИГАТЕЛЯ | 2015 |
|
RU2622183C2 |
Изобретение относится к электротехнике и может быть использовано в следящих системах и устройствах с программным управлением. Цепью изобре- тения является улучшение качества регулирования и повышение надежности. Вентильный электропривод содержит синхронный двигатель (СД) 1, якорная обмотка которого подключена к выходу инвертора (И) 2. Первый вход И 2 через блок 3 управления связан с выходом датчика 6 положения ротора СД, механически связанного с валом СД и датчиком 9 скорости. Электропривод содержит последовательно соединенные узел 8 сравнения и релейный регулятор 6, выход к-рого соединен с входом широтно-импульсного модулятора 5. Выход широтно-импульсного модулятора подключен к входу И 2. Второй вход у зла 8 соединен с выходом датчика 9, , подключенным к второму входу репейно-, го регулятора 6. В Электроприводе ре-: ализуется движение в соответствии с уравнением , где S - функция переключения релейного регулятора, рав- :Ная S K J4ndt+4n+Kjn+Kjn, где п - скорость СД 1; дп - разность заданной и истинной скоростей; К,,, К, К - коэффициенты, выбранные из заданной формы переходного процесса. 2 ил. i (Л N9 00 ts9 О9 даса/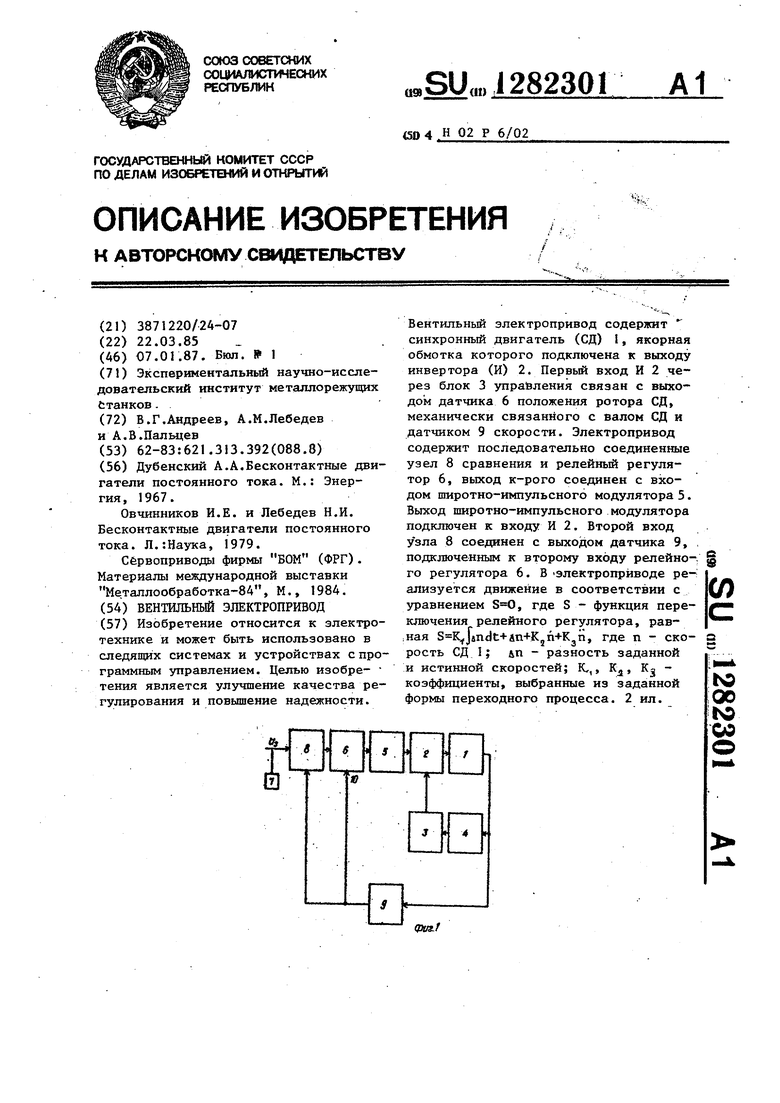
| Дубенский А.А.Бесконтактные двигатели постоянного тока | |||
| М.: Энергия, 1967 | |||
| Овчинников И.Е | |||
| и Лебедев Н.И | |||
| Бесконтактные двигатели постоянного тока | |||
| Л.:Наука, 1979 | |||
| Сервоприводы фирмы БОМ (ФРГ) | |||
| Способ приготовления сернистого красителя защитного цвета | 1921 |
|
SU84A1 |
