2.Система no п. I, отличающаяся тем, что блок фильтрации содержит фильтры переменных, низкочастотной и динамической составляющих сигнала нагрузки корпуса, инвертор и сумматор, причем выход блока предварительной обработки соединен с входом фильтра переменных составляющих и одним входом сумматора, другой вход которого через инвертор подключен к выходу фильтра переменных составляющих, вход которого соединен также с входом фильтра низкочастотной составляющей и входом фильтра динамической составляющей, чьи выходы и выход сумматора подключены к второму входу вычислителя среднеквадратичного значения.
3.Система по п. 1, отличающаяся тем, что основной первичный преобразователь
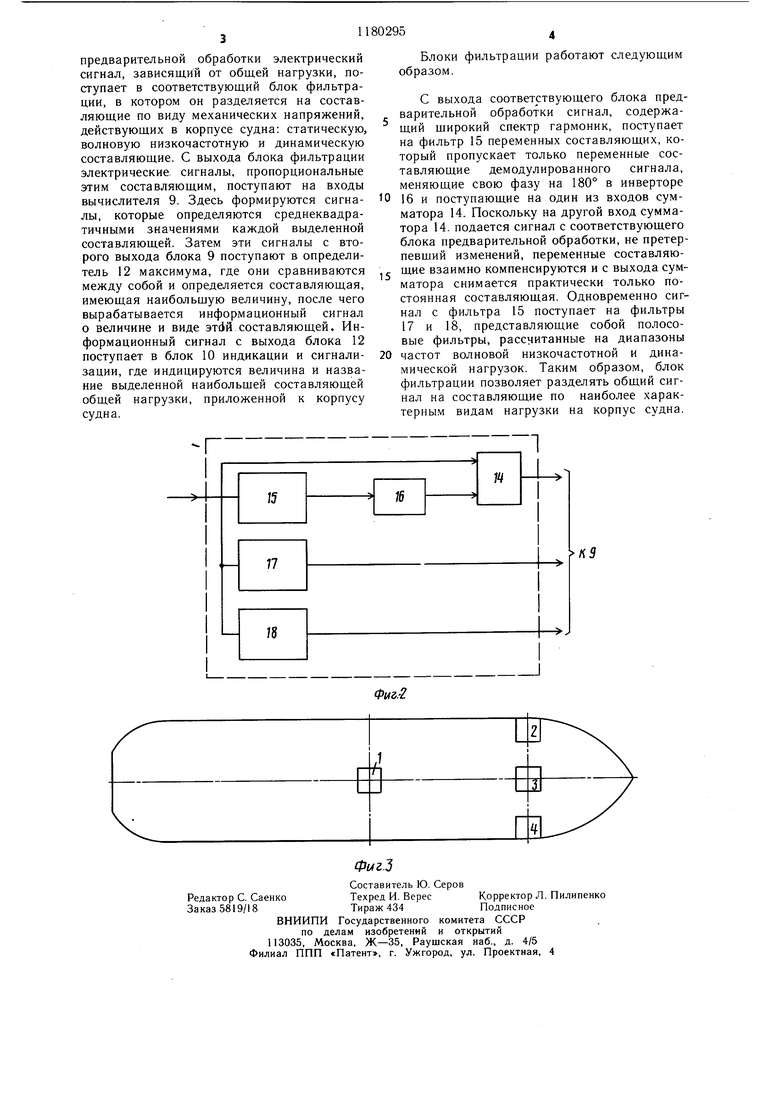
установлен на верхней палубе в меделевом сечении, второй, третий и четвертый преобразователи расположены в одной поперечной плоскости, причем второй преобразователь установлен на днище в диаметральной плоскости, а третий и четвертый - на бортах судна на одной высоте, при этом все первичные преобразователи выполнены магнитоанизотропными с двумя взаимно перпендикулярными П-образными сердечниками, которые у основного первичного преобразователя установлены на верхней палубе и их плоскости расположены крестообразно относительно диаметральной плоскости судна, а сердечники третьего и четвертого дополнительных первичных преобразователей - на бортах и крестообразно относительно плоскости щпангоутных сечений.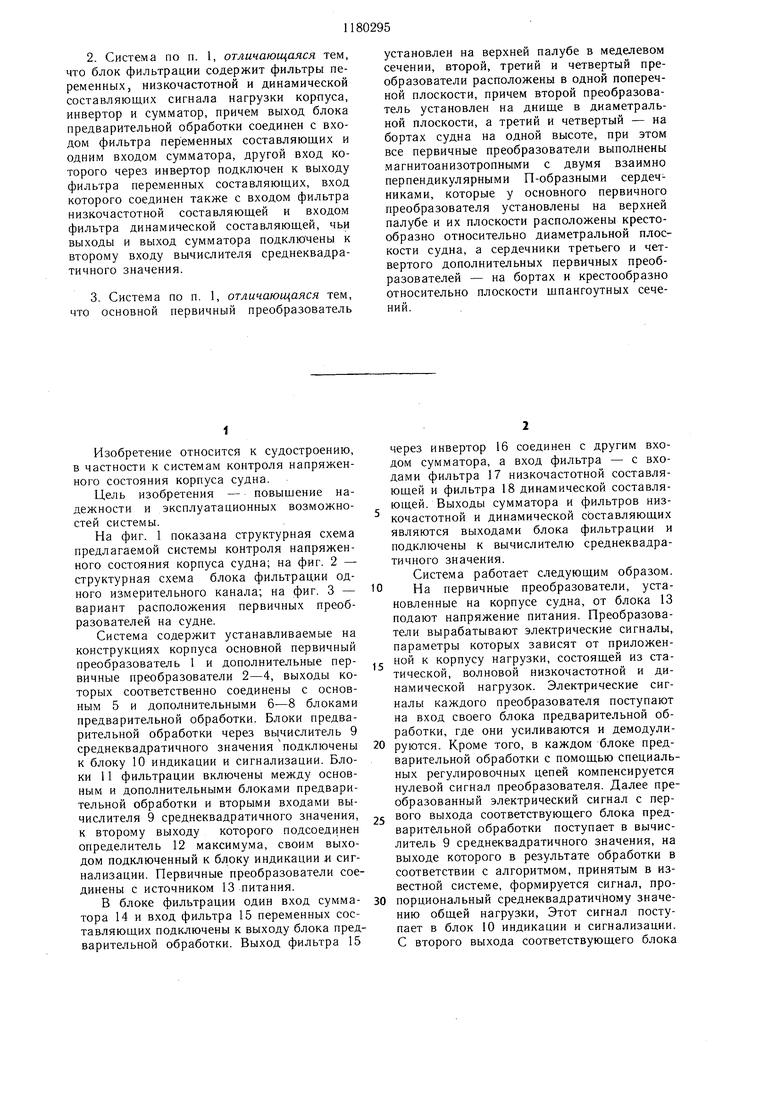
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство контроля напряжений в цилиндрическом корпусе изделия | 2024 |
|
RU2838342C1 |
| СПОСОБ ИЗМЕРЕНИЯ ВЫСОТЫ МОРСКИХ ВОЛН С БОРТА ДВИЖУЩЕГОСЯ СУДНА | 2014 |
|
RU2563314C1 |
| СПОСОБ ИЗМЕРЕНИЯ СВЕРХМАЛОЙ ВЫСОТЫ ПОЛЕТА САМОЛЕТА ПРЕИМУЩЕСТВЕННО ГИДРОСАМОЛЕТА, НАД ВОДНОЙ ПОВЕРХНОСТЬЮ И ПАРАМЕТРОВ МОРСКОГО ВОЛНЕНИЯ | 2014 |
|
RU2557999C1 |
| СУДОВОЙ НАВИГАЦИОННЫЙ КОМПЛЕКС | 2011 |
|
RU2478187C2 |
| Система контроля посадки и остойчивости судна | 1986 |
|
SU1398283A1 |
| Устройство для определения положения судна | 1987 |
|
SU1532432A1 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ ПАРАМЕТРОВ ВОЛНЕНИЯ | 2008 |
|
RU2384861C1 |
| Интеллектуальный счетчик электрической энергии | 2021 |
|
RU2786977C2 |
| Система для измерения массы груза на судах | 1985 |
|
SU1303840A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ КООРДИНАТ ВРАЩАЮЩЕГОСЯ РЕАКТИВНОГО СНАРЯДА | 1997 |
|
RU2122175C1 |
1. СИСТЕМА КОНТРОЛЯ НАПРЯЖЕННОГО СОСТОЯНИЯ КОРПУСА СУДНА, имеющего верхнюю палубу, содержащая первичный преобразователь, блок предварительной обработки, вычислитель среднеквадратичного значения и блок индикации и сигнализации, а также источник питания, соединенный с входом первичного преобразователя, выход которого соединен с блоком предварительной обработки, один выход которого соединен с первым входом вычислителя среднеквадратичного значения, а другой - с вторым входом вычислителя среднеквадратичного значения, первый выход которого соединен с первым входом блока индикации и сигнализации, отличающаяся тем, что, с целью повыщения надежности и эксплуатационных возможностей, она снабжена четырьмя блоками фильтрации, тремя дополнительными первичными преобразователями, определителем максимума, тремя дополнительными блоками предварительной обработки, при этом вход каждого из дополнительных блоков предварительной обработки соединен с выходом каждого из соответствующих дополнительных первичных преобразователей, один выход каждого из них соответственно соединен с первым входом вычислителя среднеквадратичного значения, а другой выход соответственно соединен через соответствующий дополнительный блок фильтрации с вторым входом вычислителя среднеквадратичного значения, при(Л чем вход определителя максимума соединен с вторым выходом вычислителя среднеквадратичного значения, выход - с вторым входом блока индикации и сигнализации, а вход каждого из дополнительных первичных преобразователей соединен с источником питания. оо о to со ел
Изобретение относится к судостроению, в частности к системам контроля напряженного состояния корпуса судна.
Цель изобретения - повышение надежности и эксплуатационных возможностей системы.
На фиг. 1 показана структурная схема предлагаемой системы контроля напряженного состояния корпуса судна; на фиг. 2 - структурная схема блока фильтрации одного измерительного канала; на фиг. 3 - вариант расположения первичных преобразователей на судне.
Система содержит устанавливаемые на конструкциях корпуса основной первичный преобразователь 1 и дополнительные первичные преобразователи 2-4, выходы которых соответственно соединены с основным 5 и дополнительными 6-8 блоками предварительной обработки. Блоки предварительной обработки через вычислитель 9 среднеквадратичного значения подключены к блоку 10 индикации и сигнализации. Блоки 11 фильтрации включены между основным и дополнительными блоками предварительной обработки и вторыми входами вычислителя 9 среднеквадратичного значения, к второму выходу которого подсоединен определитель 12 максимума, своим выходом подключенный к блоку индикации л сигнализации. Первичные преобразователи соединены с источником 13 питания.
В блоке фильтрации один вход сумматора 14 и вход фильтра 15 переменных составляющих подключены к выходу блока предварительной обработки. Выход фильтра 15
через инвертор 16 соединен с другим входом сумматора, а вход фильтра - с входами фильтра 17 низкочастотной составляющей и фильтра 18 динамической составляющей. Выходы сумматора и фильтров низкочастотной и динамической составляющих являются выходами блока фильтрации и подключены к вычислителю среднеквадратичного значения.
Система работает следующим образом.
0 На первичные преобразователи, установленные на корпусе судна, от блока 13 подают напряжение питания. Преобразователи вырабатывают электрические сигналы, параметры которых зависят от приложенной к корпусу нагрузки, состоящей из статической, волновой низкочастотной и дина.мической нагрузок. Электрические сигналы каждого преобразователя поступают на вход своего блока предварительной обработки, где они усиливаются и демодули0 руются. Кроме того, в каждом блоке предварительной обработки с помощью специальных регулировочных цепей компенсируется нулевой сигнал преобразователя. Далее преобразованный электрический сигнал с первого выхода соответствующего блока предварительной обработки поступает в вычислитель 9 среднеквадратичного значения, на выходе которого в результате обработки в соответствии с алгоритмом, принятым в известной системе, формируется сигнал, пропорциональный среднеквадратичному значению общей нагрузки. Этот сигнал поступает в блок 10 индикации и сигнализации. С второго выхода соответствующего блока
| Морской транспорт | |||
| Сер | |||
| «Техническая эксплуатация флота | |||
| Экспресс-информация ЦБНТИ ММФ | |||
| вып | |||
| Способ изготовления электрических сопротивлений посредством осаждения слоя проводника на поверхности изолятора | 1921 |
|
SU19A1 |
| Паровоз для отопления неспекающейся каменноугольной мелочью | 1916 |
|
SU14A1 |
